
技术摘要:
本发明涉及一种自拾取换刀的一体式链式刀库,旨在提供一种结构简单、空间占用小、制造成本低、换刀速度快、换刀冲击力小的一体式链式刀库,可设置于机床正后方,实现机床的对称化布置,避免因偏心而引起的机床精度损失,并且易于自动化产线的排布。由基座、链条机构、 全部
背景技术:
链式刀库由于具有容量大的特点在数控加工中心中得到了越来越广泛的应用。现 有的链式刀库多配合换刀机械手实现刀具交换,换刀机械手与链式刀库独立设计,换刀机 械手位于链式刀库和机床主轴之间,通过机床主轴的平移运动和换刀机械手手臂的旋转运 动完成取刀、备刀和刀具交换。这种结构一方面结构复杂,整体占用空间大,对定位精度要 求较高,生产制造成本高;另一方面换刀备刀过程繁杂,换刀速度难以提升。同时,为了防止 换刀机械手臂占用工作台移动空间,链式刀库通常在机床一侧安装,易引起机床重心偏移, 对机床精度的保持性有较大影响;并且刀库占用机床侧面空间,自动化产线布局时,场地利 用率较低,不利于机床产线化布置。另外,刀具交换过程中采用异步电机驱动,扣取式抓刀, 换刀过程不受控制,冲击力较大,长时间换刀容易造成主轴精度损失,影响机床整体加工性 能。
技术实现要素:
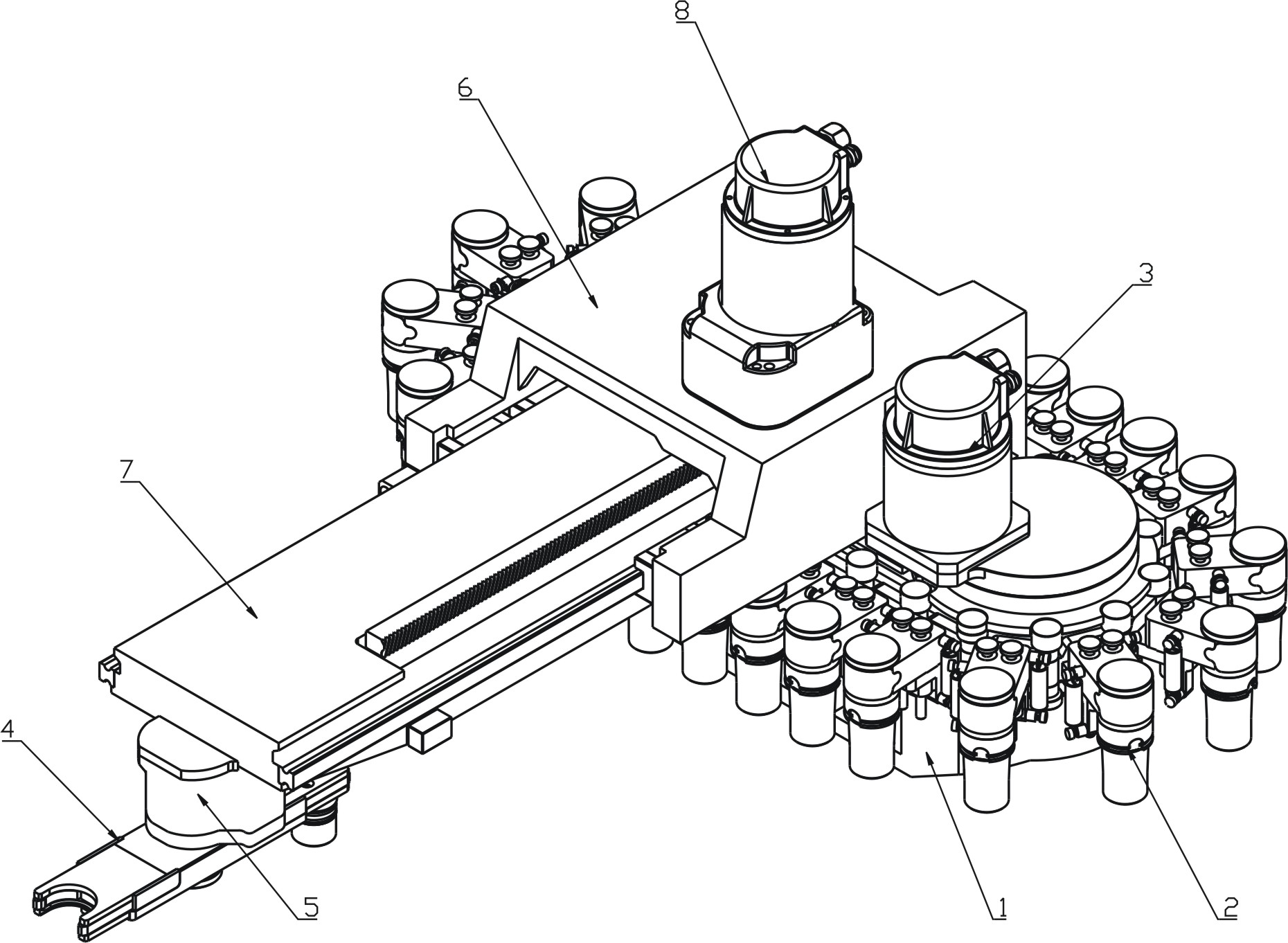
本发明的目的在于克服现有技术的不足,提供一种结构简单、空间占用小、制造成 本低、换刀速度快、换刀冲击力小的一体式链式刀库,可设置于机床正后方,实现机床的对 称化布置,避免因偏心而引起的机床精度损失,并且易于自动化产线的排布。 为了解决上述技术问题,本发明是通过以下技术方案实现的:一种自拾取换刀的 一体式链式刀库,由基座、链条机构、链条驱动单元、换刀机械手、机械手旋转驱动单元、机 械手移动推出机构以及移动推出驱动单元组成,用于容置刀具的链条机构设置于基座上, 可在链条驱动单元作用下转动;换刀机械手通过机械手移动推出机构安装于基座上,一方 面可在移动推出驱动单元作用下做推出退回直线往复移动,另一方面可在机械手旋转驱动 单元作用下进行180度旋转,实现刀具位置交换。 上述一种自拾取换刀的一体式链式刀库,所述基座上分别设置有环形滑轨和导向 槽,链条机构环绕于环形滑轨设置,可在链条驱动单元作用下沿环形滑轨转动,并通过导向 槽全行程导向。 上述一种自拾取换刀的一体式链式刀库,所述链条机构由多套单链节组件串联而 成,单链节组件包括单链节、提升杆和刀套组件,单链节通过滚轮分别与环形滑轨和导向槽 相配合,可在链条驱动单元作用下沿环形滑轨做周向旋转运动;刀套组件通过提升杆与单 链节联接,并且刀套组件与提升杆固定为一体,提升杆与单链节滑动配合。 上述一种自拾取换刀的一体式链式刀库,所述刀套组件由刀套、钢球、锁紧轴、弹 簧和球套组成,刀套固定于提升杆上;钢球设置于球套内,并通过弹簧与锁紧轴挤压球套; 球套安装于刀套内,可与刀柄配合将刀柄固定于刀套内。 上述一种自拾取换刀的一体式链式刀库,所述基座上设置有换刀提升机构,包括 3 CN 111590370 A 说 明 书 2/4 页 提升气缸、气缸固定板、提升压板和直线导轨,提升气缸通过气缸固定板安装于基座上,提 升压板安装于提升气缸的移动端,并滑动作用于直线导轨上,可在提升气缸作用下沿直线 导轨上下移动。 上述一种自拾取换刀的一体式链式刀库,所述单链节组件运动至换刀位时,其提 升杆与提升压板相配合,可随提升压板一起进行上下往复移动。 上述一种自拾取换刀的一体式链式刀库,所述机械手移动推出机构包括推出滑座 和推出滑板,推出滑座安装于基座上,推出滑板通过滑轨安装于推出滑座内,可在移动推出 驱动单元作用下沿滑轨直线往复移动。 上述一种自拾取换刀的一体式链式刀库,所述换刀机械手由旋转手臂和分体式刀 爪组成,旋转手臂安装于机械手旋转驱动单元的输出端,可在机械手旋转驱动单元作用下 旋转,机械手旋转驱动单元固定于推出滑板的端部;两个分体式刀爪分别设置于旋转手臂 的两端,分体式刀爪内设置有弹簧。 上述一种自拾取换刀的一体式链式刀库,所述分体式刀爪通过机床主轴的Z向移 动实现取刀和放刀。 上述一种自拾取换刀的一体式链式刀库,所述基座上设置有位置传感器,可对刀 库初始位置以及换刀位置进行精确位置反馈。 与现有技术相比,本发明的有益效果在于:本发明采用换刀机械手与链式刀库一 体化设计,结构简单,空间占用少,安装调试方便,精度易于保证,制造成本低;通过换刀机 械手的直线移动和旋转运动实现刀具交换,换刀机械手可移动至离机床主轴最近的位置, 换刀半径小,换刀速度快,并且有效减小了换刀动作对机床加工空间的占用;链式刀库可设 置于机床正后方,有利于机床的对称化设计,避免因偏心而引起的精度损失,并且易于自动 化产线的排布。同时,链条机构采用环形导轨并全行程导向形式,有效降低了换刀过程中刀 库的震动和噪声,可实现刀库的高速运转及高精度定位。另外,采用分体式刀爪配合主轴的 Z向移动实现自拾取换刀,充分利用了Z轴伺服驱动的优势,有效减小换刀对主轴的冲击,保 护主轴精度,可靠性高。本发明还采用刀套与单链节模块化设计,刀套与单链节一一对应联 接组成独立模块,有效避免了运动过程中的刀套甩出现象,大大降低由刀套故障引起的停 机故障率。 附图说明 图1是本发明整体结构示意图。 图2是本发明链条机构示意图。 图3是本发明提升机构与单链节组件结构示意图。 图4是本发明换刀机械手结构示意图。











