
技术摘要:
本发明涉及一种基于磁悬浮驱动的穿戴式力反馈装置,其包括用于产生触觉交互所需空间磁场的磁悬浮触觉驱动组件,位于所述空间磁场中且用于感应电磁力并施加于用户手部的磁性力反馈手套,以及用于对所述磁悬浮触觉驱动组件进行智能调节,提高空间磁场性能的磁场智能控制 全部
背景技术:
穿戴式触觉反馈装置能够让用户通过灵巧的双手操作和灵敏的感知能力更自然、 直接地触摸和操作远程或虚拟物体,可显著增强与虚拟场景交互的沉浸感与交互性,是当 前触觉交互领域的研究热点。目前,现有穿戴式触觉装置最常用的两种驱动方式是电机驱 动与气动,可为用户提供手或手指皮肤触觉反馈,或者动觉模拟(即力反馈)。然而,借助机 械传动结构的触觉设备相对笨重,佩戴过程略为繁琐,并且机械传递机构之间存在摩擦,交 互体验的真实感与舒适度有待提高。 为了提供直观自然的触觉交互,近五年来国内外研究者借助磁悬浮技术非接触的 优势,陆续开展了基于手/手指的磁悬浮触觉交互相关研究。Adel等人及Pedram等人均设计 了平面式线圈阵列,通过在手指上佩戴一个带小磁体的指套,实现了单点触觉交互。Zhang 等人提出了一种增强磁场强度的线圈阵列设计方法并通过仿真的方式生成了与3D人脸体 积数据相对应的磁场。与指套式单点磁悬浮触觉交互相关研究相比,Zhang等人通过仿真生 成了特定的3D磁场,考虑了多点力触觉的同时生成,但该研究仍处于建模和仿真阶段。以上 基于手/手指的磁悬浮触觉交互研究均仅采用固定的平面线圈布局,所能产生的空间磁场 类型有限,这对于包含多种交互对象以及交互方式多样的穿戴式触觉交互应用有一定的局 限性,并且以上研究中磁力与线圈电流可能存在病态映射导致触觉反馈不稳定的情形。现 有基于磁悬浮技术的触觉反馈方案往往通过在手部(例如手指)佩戴永磁体来实现触觉反 馈,这种非柔性的磁性单元(即永磁体)会影响触觉手套的舒适性及触觉再现的真实感。此 外,系统在线运行时,外界干扰以及系统运行效率是提高触觉交互体验不可忽视的因素。 因此,现有技术还有待于改进和发展。
技术实现要素:
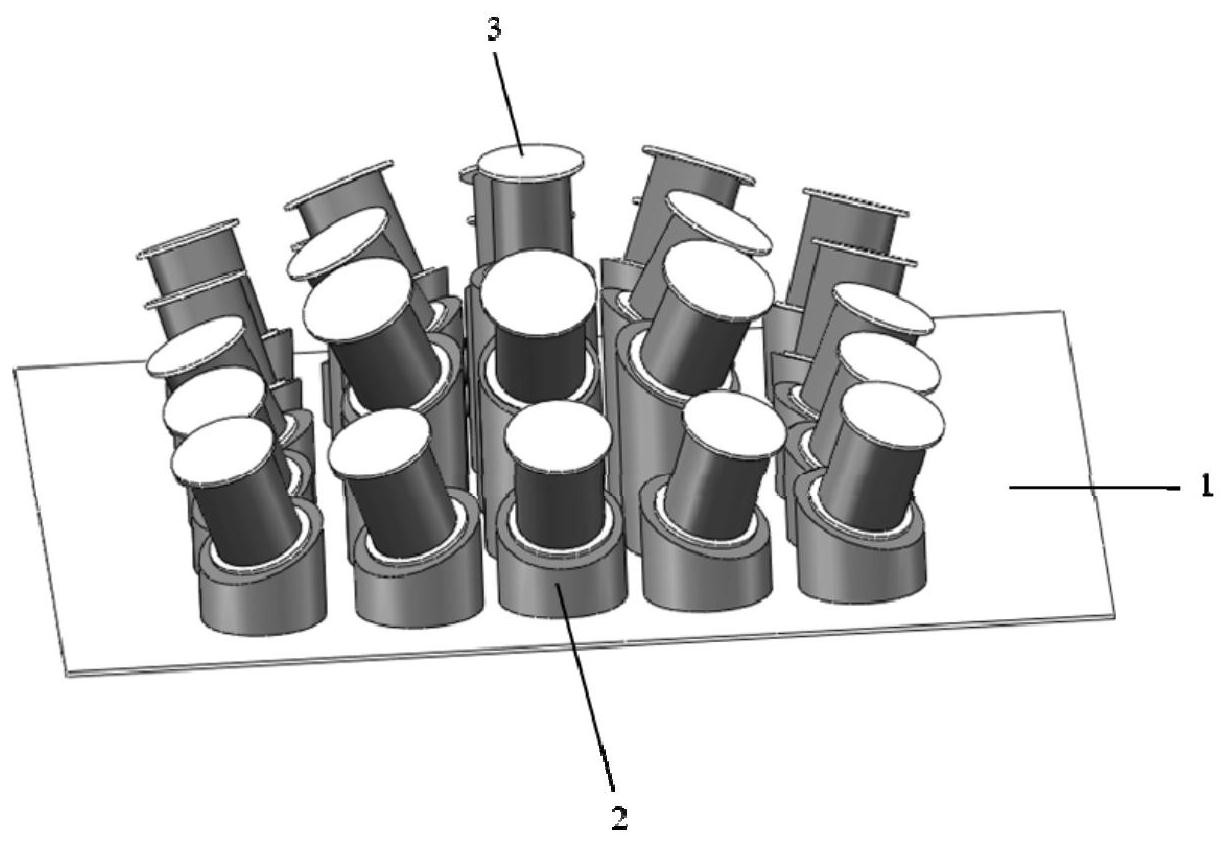
针对现有技术将磁悬浮原理应用于穿戴式触觉交互存在的磁悬浮触觉驱动组件 扩展性不强、磁性单元佩戴舒适度不高、以及交互稳定性与真实感亟待提高的问题,本申请 提供了一种基于磁悬浮驱动的穿戴式力反馈装置。 一种基于磁悬浮驱动的穿戴式力反馈装置,其中,包括用于产生触觉交互所需空 间磁场的磁悬浮触觉驱动组件,位于所述空间磁场中且用于感应电磁力并施加于用户手部 的磁性力反馈手套,以及用于对所述磁悬浮触觉驱动组件进行智能调节,提高空间磁场性 能的磁场智能控制组件。 所述基于磁悬浮驱动的穿戴式力反馈装置,其中,所述磁悬浮触觉驱动组件包括 底座,设置在所述底座上的柔性线圈容器,以及附着在所述柔性线圈容器上的刚性线圈,通 过调整所述柔性线圈容器的形状以适配所述刚性线圈的布局。 3 CN 111596762 A 说 明 书 2/7 页 所述基于磁悬浮驱动的穿戴式力反馈装置,其中,所述柔性线圈容器包括划分成 系列单元的柔性薄膜,每个单元中均填充颗粒材料形成真空腔室,通过调整所述真空腔室 的真空度控制所述柔性薄膜的表面形状和机械性能。 所述基于磁悬浮驱动的穿戴式力反馈装置,其中,所述刚性线圈的布局包括以下 步骤: 交互应用需求的表征:分析磁性力反馈手套交互应用的需求特征,得到能够表征 不同交互应用需求的关键因素; 优化单个线圈结构参数:以导线直径、绕线匝数、线圈高度为优化变量;以高磁场 低功耗为目标设计优化目标函数;考虑刚性线圈的载流范围,设定参数优化的边界条件,采 用最优化方法对单个刚性线圈结构的优化模型进行求解; 优化刚性线圈布局参数:以优化后的所述单个刚性线圈结构为基础,以刚性线圈 数量、刚性线圈之间的距离、各刚性线圈姿态角为优化变量;结合交互应用需求,以完成一 次交互过程刚性线圈功耗最低,以及电流-磁场变换矩阵的伪逆矩阵的条件数最小为目标 设计优化目标函数;考虑线圈载流范围和操作空间范围,设定参数优化的边界条件;采用最 优化方法对所述刚性线圈布局优化模型进行求解。 所述基于磁悬浮驱动的穿戴式力反馈装置,其中,所述磁性力反馈手套包括柔性 织物,以及设置在所述柔性织物上的柔性磁性单元。 所述基于磁悬浮驱动的穿戴式力反馈装置,其中,所述柔性磁性单元的制备包括 以下步骤: 将软体材料和磁性材料按照预定比例混合,将混合后的混合物加入模具中进行固 化处理; 从所述模具中取出柔性磁性单元前驱物,对所述柔性磁性单元前驱物进行充磁, 得到所述柔性磁性单元。 所述基于磁悬浮驱动的穿戴式力反馈装置,其中,所述磁场智能控制组件包括电 流驱动单元、数据采集单元以及智能控制单元,所述电流驱动单元用于调整所述磁悬浮触 觉驱动组件中刚性线圈的电流;所述数据采集单元用于获取所述磁悬浮触觉驱动组件中刚 性线圈中的实际电流以及用户手部收到的实际反馈力;所述智能控制单元用于自适应调整 所述磁悬浮触觉驱动组件中刚性线圈的电流。 有益效果:本发明提供的基于磁悬浮驱动的穿戴式力反馈装置通过磁力悬浮提供 驱动力,无需机械传动机构,避免了复杂的机械设计,具有无摩擦、结构紧凑、低延时、无线 的特点。与现有穿戴式磁悬浮触觉技术相比,本发明为穿戴式磁悬浮力反馈装置提出的方 案在扩展性、稳定性、舒适度及真实感方面更具优势。 附图说明 图1为本发明磁悬浮触觉驱动组件的结构示意图。 图2为本发明磁悬浮触觉驱动组件中柔性线圈容器设计原理示意图。 图3为本发明磁悬浮触觉驱动组件的设计流程图。 图4为本发明磁性力反馈手套的结构示意图。 图5为本发明磁性力反馈手套的柔性磁性单元的制备工艺流程示意图。 4 CN 111596762 A 说 明 书 3/7 页 图6为本发明基于数据驱动误差补偿的自适应智能控制算法流程示意图。











