
技术摘要:
本发明涉及家用机械领域,更具体的说是一种机械扫地机器人,可以实现对垃圾的清扫;当清扫的垃圾积蓄满时,可以停止收集垃圾;可以实现自动转向,进而防止产生清扫的四角;设置有四个方向的触发角度,任意角度触发都可实现转向。包括车身组合体、收集组合体、方向控制 全部
背景技术:
机械扫地机器人是机械领域一种常用的设备,但是一般的机械扫地机器人功能比 较单一。
技术实现要素:
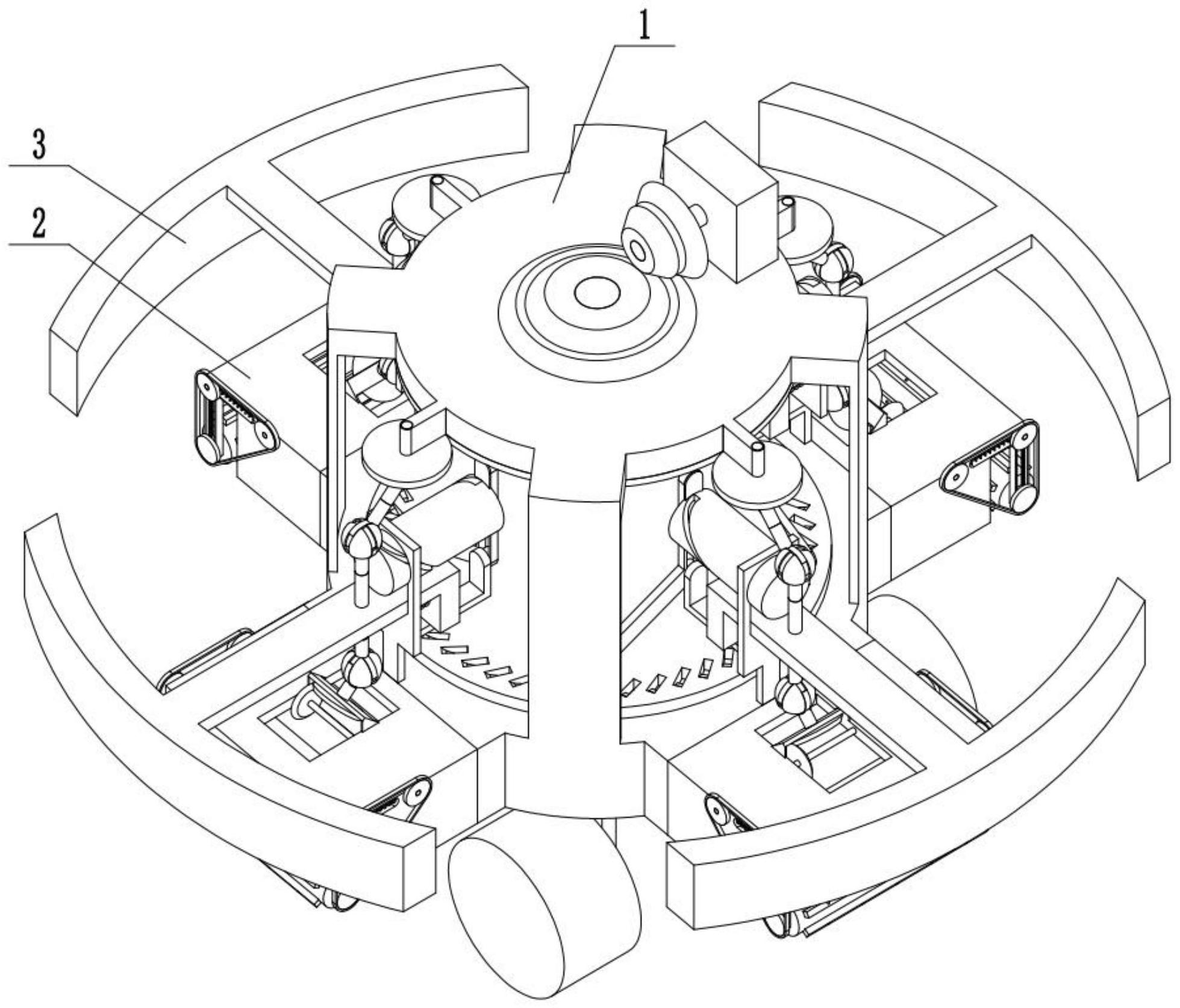
本发明的目的是提供一种机械扫地机器人,可以实现对垃圾的清扫;当清扫的垃 圾积蓄满时,可以停止收集垃圾;可以实现自动转向,进而防止产生清扫的四角;设置有四 个方向的触发角度,任意角度触发都可实现转向。 本发明的目的通过以下技术方案来实现: 一种机械扫地机器人,包括车身组合体、收集组合体、方向控制组合体,其特征在 于:所述车身组合体与收集组合体相连接,收集组合体与方向控制组合体相连接,车身组合 体与方向控制组合体相连接。 作为本技术方案的进一步优化,本发明一种机械扫地机器人,所述车身组合体包 括框架、万向轮、直齿一、铰接转杆一、锥齿一、锥齿二、中端锥齿轴一、输入电机、锥齿三、锥 齿四、中端转孔、中端直齿,万向轮与框架转动连接,直齿一与框架转动连接,铰接转杆一与 直齿一铰接连接,锥齿一与框架转动连接,锥齿一与中端直齿固定连接,中端直齿与直齿一 啮合传动,中端转孔设置在框架上,锥齿二与中端锥齿轴一固定连接,中端锥齿轴一与锥齿 一转动连接,输入电机与框架固定连接,锥齿三、锥齿四与输入电机固定连接,锥齿三、锥齿 四分别与锥齿一、锥齿二啮合传动。 作为本技术方案的进一步优化,本发明一种机械扫地机器人,所述收集组合体包 括收集外框、辊子、毛刷、带轮一、连接皮带、带轮三、带轮二、中端转柱一、传动锥齿一、传动 锥齿二、弧形杆锥齿轴、中端传动球一、弧形传动杆一、中端传动球二、弧形传动杆二、承载 杆、连杆、密封杆、刮板、收集腔、辊子轴、矩形滑子一、矩形滑子滑杆一、矩形滑子推簧一、矩 形滑子二、矩形滑子滑杆二、矩形滑子推簧二、内端推簧一、内端推簧二,辊子轴与矩形滑子 一转动连接,辊子与辊子轴固定连接,毛刷与辊子滑动连接,内端推簧二设置在毛刷与辊子 之间,矩形滑子滑杆一与收集外框固定连接,矩形滑子推簧一与矩形滑子滑杆一套接连接, 矩形滑子一与矩形滑子滑杆一滑动连接,矩形滑子推簧一设置在矩形滑子一与矩形滑子滑 杆一之间,带轮一与辊子轴固定连接,矩形滑子滑杆二与收集外框固定连接,矩形滑子二与 矩形滑子滑杆二滑动连接,矩形滑子推簧二与矩形滑子滑杆二套接连接,带轮二与矩形滑 子二转动连接,带轮三与中端转柱一固定连接,中端转柱一与收集外框转动连接,传动锥齿 一与中端转柱一固定连接,传动锥齿一与传动锥齿二啮合传动,传动锥齿二与弧形杆锥齿 轴固定连接,弧形杆锥齿轴与收集外框转动连接,弧形杆锥齿轴与中端传动球一滑动配合 连接,中端传动球一与弧形传动杆一固定配合连接,弧形传动杆一与中端传动球二滑动配 4 CN 111588314 A 说 明 书 2/5 页 合连接,中端传动球二与弧形传动杆二滑动配合连接,收集腔设置在收集外框的内端,承载 杆与收集腔滑动连接,内端推簧一设置在承载杆与收集腔之间,承载杆与连杆铰接连接,连 杆与密封杆铰接连接,密封杆与刮板滑动连接,刮板与收集外框固定连接,弧形传动杆二与 铰接转杆一固定连接,收集外框与框架固定连接。 作为本技术方案的进一步优化,本发明一种机械扫地机器人,所述方向控制组合 体包括槽轮盘、单向槽、弧形挡板、轴向辊子、限位杆、周向弧形槽、铰接滑柱、拉簧、单向摆 杆、导向轮、下端锥齿轴一、下端锥齿一、下端锥齿二,单向槽设置在槽轮盘上,弧形挡板与 限位杆滑动连接,拉簧固定连接在弧形挡板与限位杆之间,拉簧处于拉伸状态,轴向辊子与 弧形挡板转动连接,周向弧形槽设置在轴向辊子上,铰接滑柱与弧形挡板固定连接,铰接滑 柱与周向弧形槽滑动连接,单向摆杆铰接连接在轴向辊子的偏心位置,单向摆杆与限位杆 配合连接,单向摆杆与单向槽配合连接,导向轮与槽轮盘转动连接,下端锥齿轴一与槽轮盘 转动连接,下端锥齿轴一与下端锥齿一固定连接,下端锥齿一与下端锥齿二啮合传动,下端 锥齿二与导向轮固定连接,槽轮盘与中端转孔转动连接,中端锥齿轴一与下端锥齿轴一固 定连接,限位杆与框架固定连接。 本发明一种机械扫地机器人的有益效果为: 本发明一种机械扫地机器人,中端锥齿轴一转动时,通过下端锥齿轴一带动着下 端锥齿一转动,进而通过下端锥齿二驱动着导向轮转动,进而带动着装置行进;同时当弧形 挡板与地形的边界接触时,进而使得弧形挡板向方向控制组合体的内测运动,同时拉伸拉 簧,同时通过铰接滑柱与周向弧形槽的配合连接,驱动着轴向辊子转动,进而通过轴向辊子 驱动着单向摆杆摆动,同时通过单向摆杆与单向槽的配合连接,驱动着弧形挡板逆时针转 动,进而通过弧形挡板驱动着导向轮转动,进而带动着装置进行转向;弧形挡板设置有多 个,并且多个弧形挡板分布在槽轮盘的四个方向,进而任意一个方向触发,都可使得导向轮 转向进而使得整个装置进行转向。 附图说明 下面结合附图和具体实施方法对本发明做进一步详细的说明。 图1是本发明的整体结构示意图一; 图2是本发明的整体结构示意图二; 图3是本发明的整体结构示意图三; 图4是本发明的车身组合体1结构示意图一; 图5是本发明的车身组合体1结构示意图二; 图6是本发明的收集组合体2结构示意图一; 图7是本发明的收集组合体2结构示意图二; 图8是本发明的收集组合体2结构示意图三; 图9是本发明的收集组合体2结构示意图四; 图10是本发明的收集组合体2结构示意图五; 图11是本发明的方向控制组合体3结构示意图一; 图12是本发明的方向控制组合体3结构示意图二; 图13是本发明的方向控制组合体3结构示意图三。 5 CN 111588314 A 说 明 书 3/5 页 图中:车身组合体1;框架1-1;万向轮1-2;直齿一1-3;铰接转杆一1-4;锥齿一1-5; 锥齿二1-6;中端锥齿轴一1-7;输入电机1-8;锥齿三1-9;锥齿四1-10;中端转孔1-11;中端 直齿1-12;收集组合体2;收集外框2-1;辊子2-2;毛刷2-3;带轮一2-4;连接皮带2-5;带轮三 2-6;带轮二2-7;中端转柱一2-8;传动锥齿一2-9;传动锥齿二2-10;弧形杆锥齿轴2-11;中 端传动球一2-12;弧形传动杆一2-13;中端传动球二2-14;弧形传动杆二2-15;承载杆2-16; 连杆2-17;密封杆2-18;刮板2-19;收集腔2-20;辊子轴2-21;矩形滑子一2-22;矩形滑子滑 杆一2-23;矩形滑子推簧一2-24;矩形滑子二2-25;矩形滑子滑杆二2-26;矩形滑子推簧二 2-27;内端推簧一2-28;内端推簧二2-29;方向控制组合体3;槽轮盘3-1;单向槽3-2;弧形挡 板3-3;轴向辊子3-4;限位杆3-5;周向弧形槽3-6;铰接滑柱3-7;拉簧3-8;单向摆杆3-9;导 向轮3-10;下端锥齿轴一3-11;下端锥齿一3-12;下端锥齿二3-14。











