
技术摘要:
暗涵检测爬行机器人,涉及机器人领域,尤其是一种用于暗涵检测,降低检测风险,提高检测可靠性的暗涵检测爬行机器人。本发明包括机器人本体、操控箱和控制线缆,机器人本体放置在暗涵内进行检测,操控箱放置在地面上,机器人本体与操控箱之间通过控制线缆连接;机器人 全部
背景技术:
由于河道的流速慢,会沉积大量泥沙,河道作为输送水资源的载体,流水冲击造成 土壤迁移,沉积是造成当前河道淤泥的一大主要原因。当前有很多河道,由于建设年代比较 早,缺乏科学的规划与施工,在水力、太阳烘晒以及人力交替下,产生严重的水土流失现象。 流失的土壤一部分被沉积于河道的底部,经过长时间的作用造成河床的台升,而被带走的 土壤则会对下河道产生淤塞,长期作用会造成水位落差的降低。 在日常生活中,会产生很多生活垃圾以及农业生产过程中产生的农作物秸秆等富 含有机成分的物质,被人们随意的排放到河道中。由于河道本身有自净能力,若是未经水体 净化的部分,则会以更大比重沉积在河床底部。施工人员每次去检测不仅要带上面罩防止 有毒气体,还要面临突然涌水带来的涨水风险,由于环境恶劣,检测效果不佳,而且还存在 人身伤亡的隐患。
技术实现要素:
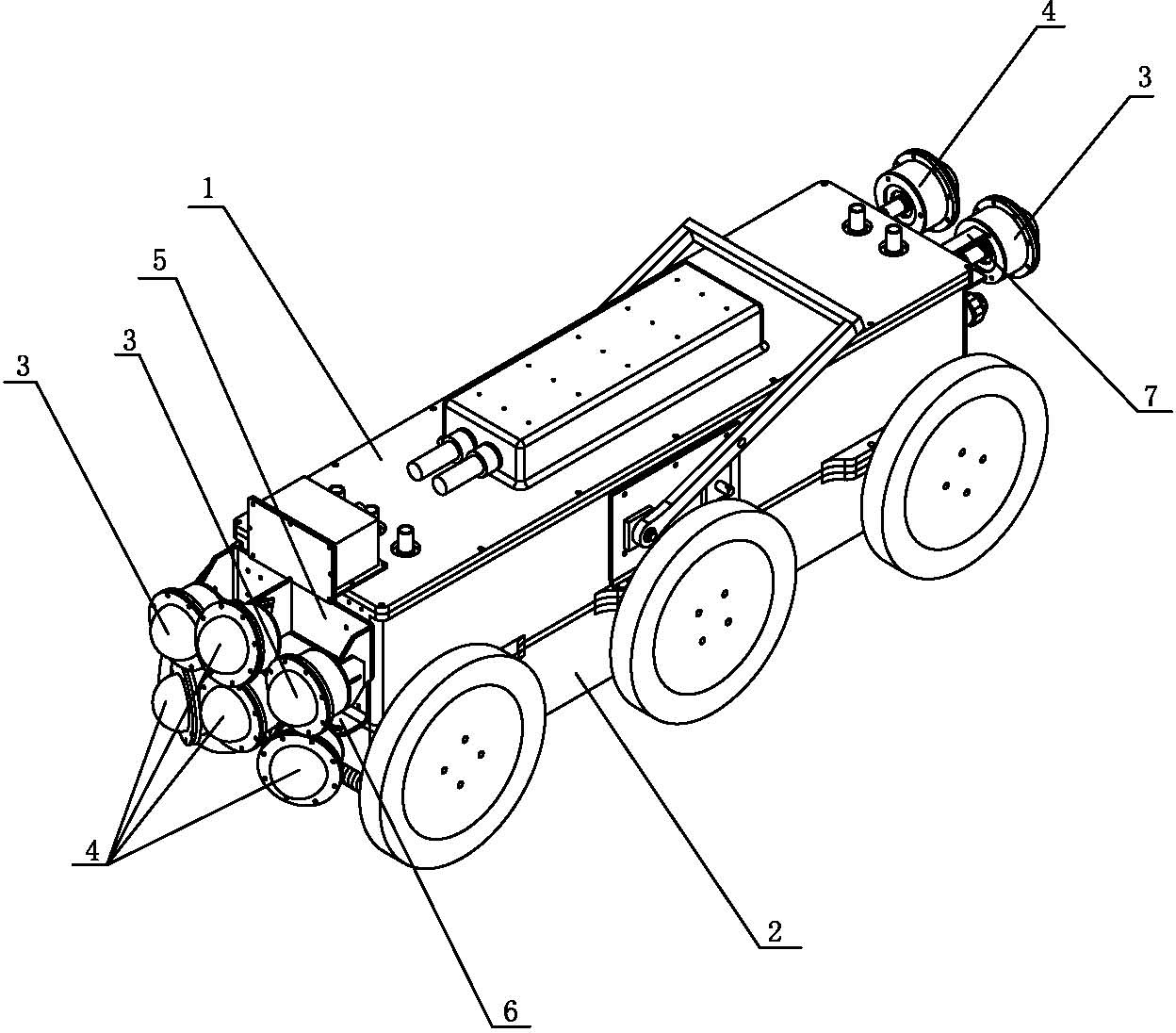
本发明所要解决的就是现有河道内部环境恶劣,检测效果不佳,还存在人身伤亡 隐患的问题,提供一种用于暗涵检测,降低检测风险,提高检测可靠性的暗涵检测爬行机器 人。 本发明的暗涵检测爬行机器人,其特征在于该爬行机器人包括机器人本体、操控 箱和控制线缆,机器人本体放置在暗涵内进行检测,操控箱放置在地面上,机器人本体与操 控箱之间通过控制线缆连接;机器人本体呈长条状,包括上壳体和下壳体,上壳体固定安装 在下壳体上;其中: 上壳体上设置有控制模块、照明灯、摄像头、矩形支架、扇形支架以及后支架,控制模块 固定在上壳体内部,矩形支架与扇形支架固定在上壳体前端,矩形支架位于扇形支架上方, 后支架固定在上壳体后端;照明灯为四个,其中一个固定在上壳体前端顶部,向前照射,另 一个照明灯固定在后支架上,向后照射,剩余两个照明灯固定在矩形支架两侧,向前照射; 摄像头为五个,其中一个固定在矩形支架中间,位于矩形支架的两个照明灯之间,另一个摄 像头固定在后支架上,与后支架上的照明灯以后支架中点为中心对称设置,其余三个摄像 头等距固定在扇形支架的扇形面的左、中、右三个点上; 下壳体内设置有电源装置、电机、减速机、驱动器和行走装置,电源装置固定在下壳体 内部中间,电机分为两组,分别设置在下壳体前部和后部,每组两个电机,分别固定在下壳 体内部两侧;驱动器为两个,分别安装在电源装置的前端和后端,与两组电机分别连接,每 个驱动器单独控制一组电机;减速机为四个,分别安装在下壳体四个角处,与四个电机一一 对应连接,每个减速机均通过齿轮与电机联动;减速电机与行走装置连接,带动行走装置运 4 CN 111546360 A 说 明 书 2/4 页 动; 照明灯与摄像头并联后,与控制模块串联连接,控制模块通过控制线缆与操控箱连接; 两个驱动器并联后与电源装置串联连接,每个驱动器连接两个电机,带动电机工作,控制模 块通过导线与两个驱动器分别连接。 所述的下壳体上还设置有顶盖,顶盖覆盖在下壳体顶部,顶盖与下壳体之间的缝 隙处设置有防水结构,上壳体与下壳体之间的缝隙处设置有防水结构,该防水结构包括密 封圈和密封脂,在密封圈的四周涂满密封脂,放入顶盖与下壳体之间的缝隙以及上壳体与 下壳体之间的缝隙中,并利用螺钉紧固连接下壳体与顶盖、下壳体与上壳体。 所述的下壳体内部设置有L型支撑架,L型支撑架为四个,分别设置在下壳体内部 的四个角,L型支撑架通过螺钉与下壳体内壁固定连接,四个电机均固定在L型支撑架上。 所述的上壳体后端设置有电缆口,控制模块与电缆口连接,控制线缆与电缆口连 接,控制模块的数据经过电缆口后通过控制线缆传输至操控箱。 所述的下壳体后端还设置有吊环,在进入暗涵的时候,可以使用钢绳起吊爬行机 器人放入暗涵入口处。 所述的操控箱包括箱体、箱盖、接口、按键、摇杆和显示屏,箱体侧壁上设有接口, 箱体上表面设置按键和摇杆,箱体顶部设置有箱盖,箱盖内壁设置显示屏,接口与控制线缆 连接,操控箱通过控制线缆与下壳体内的控制模块连接,操控箱通过控制模块控制机器人 本体运行。 所述的爬行机器人还包括有线缆收纳装置,线缆收纳装置包括线缆盘、线缆架、转 轴、拉手以及电源口,线缆架呈框型,中间水平设置有转轴,线缆盘安装在转轴上,绕转轴转 动,控制线缆缠绕在线缆盘上;拉手设置在线缆架顶部,线缆架底部还设置有滚轮;线缆盘 上还设置有电源口,电源口与外接电源连接,外接电源通过控制线缆为操控箱、控制模块、 摄像头以及照明灯供电。 所述的行走装置包括锥齿轮、轴套、轴承、车轮盘和车轮,轴套里面设置油封盖,轴 套通过螺钉与下壳体的侧面下部固定连接,轴承穿过轴套安装,轴承一端固定安装车轮盘, 另一端固定安装锥齿轮;电机包括动力输出轴和传动齿轮,减速机包括动力输入轴、动力传 输轴、传动齿轮以及锥齿轮,动力输出轴与动力输入轴上均安装传动齿轮,两个传动齿轮相 互啮合,动力传输轴上设置锥齿轮,该锥齿轮与轴承上的锥齿轮啮合,电机转动,通过动力 输出轴带动减速机的动力输入轴转动,经过减速机变速后,动力由动力传输轴输出,通过锥 齿轮带动轮轴以及车轮转动。 所述的控制模块中包含通信模块,控制模块通过控制线缆与操控箱连接,通过数 据线与驱动器连接,操控箱发出的指令,通过控制线缆传递至控制模块,控制模块根据指 令,控制照明灯和摄像头的开启、关闭,同时将行走命令传递给驱动器,驱动器根据行走命 令控制电机正转、反转或停转,进而实现机器人本体的运动;同时摄像头拍摄的画面信号, 通过控制模块实时的传输给操控箱,由操控箱的显示屏分画面进行显示,便于施工人员观 察判断。 本发明的暗涵检测爬行机器人,设有前后摄像头和灯光,实现了在没有光源的情 况下可以清晰的看到该爬行机器人周身的情况,同时爬行机器人带有的摄像头可以通过显 示屏成像给作业人员,可以形成录像,供作业人员去观察和发现暗涵里的情况。该机器人可 5 CN 111546360 A 说 明 书 3/4 页 以有效的完成暗涵检测,从而降低了作业人员检查的风险,增加了暗涵检测的可靠性,不在 是人为凭经验去观察暗涵里的情况,避免人为凭经验出现的错误信息,给暗涵检测造成更 大的损失。 附图说明 图1为本发明结构示意图。 图2为本发明下壳体内部结构示意图。 图3为操控箱结构示意图。 图4为线缆收纳装置结构示意图。 图5为电机与减速机连接结构示意图。 图6为摄像头与照明灯连接电路示意图。 图7为驱动器和电机连接电路示意图。 其中,上壳体1,下壳体2,照明灯3,摄像头4,矩形支架5,扇形支架6,后支架7,电源 装置8,电机9,减速机10,驱动器11,传动齿轮12,吊环13,箱体14,箱盖15,接口16,按键17, 摇杆18,显示屏19,线缆盘20,线缆架21,转轴22,拉手23,电源口24,锥齿轮25。











