
技术摘要:
本发明公开了一种基于环境感知和车辆行驶意图的轨迹预测方法,本发明通过无人车感知传感器结合地图和定位信息形成局部车辆行驶栅格图,结合在特定结构化道路中,车辆的行驶规律,能够精确预测车周围的车辆在下一时刻的行驶方位,进而计算出行驶轨迹。本发明能够随着多 全部
背景技术:
无人车在自主行驶时,会穿梭在车流间。如何准确预测周围车辆的行驶轨迹对无 人车进行下一时刻的路径规划十分重要。传统的车辆轨迹预测是基于车辆历史轨迹,预测 准确性无法满足无人车自主行驶需求。近几年,无人车在感知、定位、高精度地图、通信方面 有了长足的发展,所以结合无人车强大的环境感知能力进行预测已经形成了一种新的思 路。同时,在一些特定结构化道路下车辆虽多,而且随机性很大,但是车辆的行驶是有规律 可循的,表现为各个出入口之间的连续轨迹,所以车辆在下一时刻的状态有限的。如果将无 人车环境感知能力和目标车辆行驶意图结合进行预测,既可以获得好高的实时性,又可以 简化将预测过程。
技术实现要素:
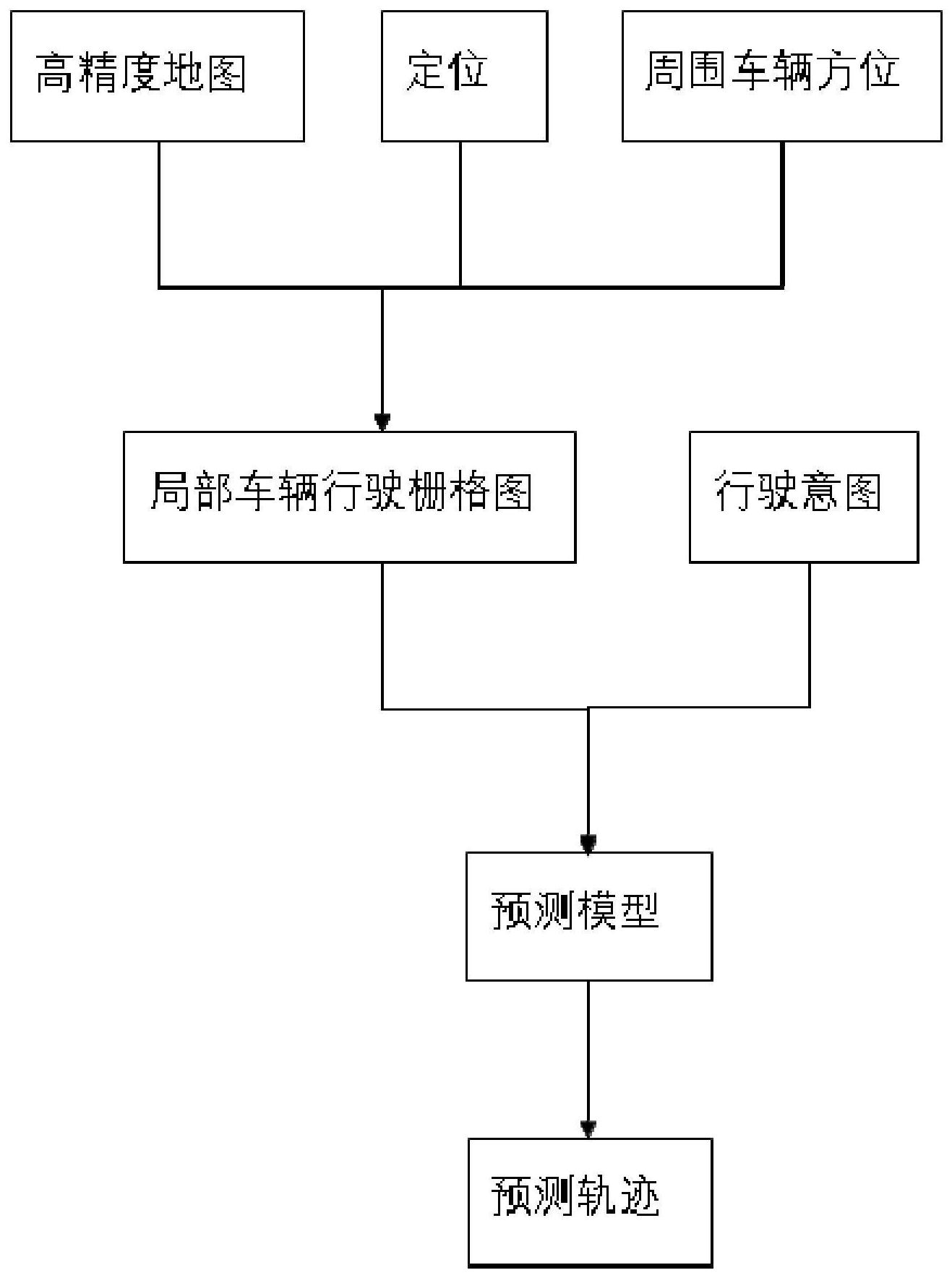
本发明的目的在于提供一种基于环境感知和车辆行驶意图的轨迹预测方法,能够 在十字路口、丁字路口、普通车道准确的预测车辆行驶轨迹。 为了达到上述目的,本发明包括以下步骤: 步骤一,通过目标无人车结合地图和定位,生成局部车辆行驶的栅格地图; 步骤二,在特定结构化道路车辆行驶具备一定规律,生成特定目标候选轨迹集G; 步骤三,对目标无人车行驶轨迹与轨迹集G中候选轨迹进行相似性度量,概率最大 的是预测轨迹。 步骤一中,通过地图获取通行区域车道宽度W、车道数量N和车道线坐标信息,按照 无人车行驶方向,以该区域左上顶点O为起点,从上至下对道路进行固定大小的栅格化标 记,并通过顶点O坐标依次计算出每一个栅格的四个顶点坐标{D0、D1、D2、D3},从而形成序 列化栅格顶点集U。 步骤二中,罗列该区域出入口正常行驶节点集E,按照该区域道路的行驶规则,将 入口起始点E0和出口终止点E1连成光滑的车辆行驶轨迹点集{{x0 ,y0} ,{x1 ,y1} ,{x2 , y2},……},形成该区域路段所有可能行驶的轨迹集G。 将入口起始点E0和出口终止点E1连成光滑的车辆行驶轨迹点集时采用应用五次 多项式插值算法。 步骤三的具体方法如下: 第一步,通过轨道集G中轨迹的轨迹点坐标和栅格顶点坐标进行横纵向坐标值比 较,确定每一个轨迹点所在的栅格,形成对应轨迹的栅格集合GU; 第二步,通过激光雷达感知目标车辆位置{x,y},应用步骤三中横纵向坐标值比较 确定目标车辆所在栅格,结合道路行驶规则,记录目标车辆下一时刻的可能状态,然后在步 3 CN 111595352 A 说 明 书 2/2 页 骤二的轨迹集G中查询相同出入口节点对应的栅格集合,形成候选集H; 第三步,无人车记录连续几个周期目标车所属栅格,形成真实行驶栅格集R; 第四步,将第二步和第三步中的候选集H和真实行驶栅格集R进行相似性度量,寻 找匹配程度高的栅格集作为最优方案,并依照栅格和轨迹的对应关系,将最优预测轨迹发 送给规划模块。 步骤三中,相似性度量采用Jaccards算法。 与现有技术相比,本发明通过无人车感知传感器结合地图和定位信息形成局部车 辆行驶栅格图,结合在特定结构化道路中,车辆的行驶规律,能够精确预测车周围的车辆在 下一时刻的行驶方位,进而计算出行驶轨迹。本发明能够随着多周期的目标位置感知,得到 的预测轨迹可信度越高,将不确定的预测问题简化为一个确定的方案选择和轨迹匹配问 题,极大的降低了预测难度。 附图说明 图1为本发明的流程图; 图2为本发明在十字路口道路栅格化标记图和行驶轨迹图。











