
技术摘要:
本发明描述了吊运车系统以及相关的导轨和轨道,吊运车具有集成的制动系统,该制动系统可以适于基于各种控制输入(内部的或外部的)使吊运车减速或停止。轨道系统可以由与切换系统和所描述的吊运车互连的一系列张紧的缆线或轨道中的一者或两者形成,该吊运车能够在轨道系 全部
背景技术:
吊运车设计、如用于滑索的吊运车设计、以及相关的轨道和缆线是已知的。通常, 这些吊运车是安装有滑轮的吊运车,滑轮搁置在缆线的顶部或以其他方式与导轨对准,并 且驾乘者被悬挂在缆线/导轨和吊运车的下方。吊运车沿缆线/导轨运行并可以在终点之前 或在达到预定速率之前减速或停止。 现有技术中的滑索系统在设计上相对简单并且在卸载前以单个矢量从一个位置 运行到另一个位置。 吊运车中使用的制动系统在很大程度上是被动式的并且不经调节,因此,较重的 驾乘者倾向于比较轻的驾乘者移动得更快,并且驾乘者重量必须落在安全的操作区带内以 避免过快加速或超越制动系统的功能。 此外,由于制动器是被动式制动器并且几乎不可能进行调整,因此仅可以预设单 个速度、例如单个最大速度,并且该速度在运行期间不能更改以例如更改驾乘者沿滑索行 程的速度。 最后,在使用缆线的情况下驾乘被限制至单个方向,而在使用导轨的情况下驾乘 被限制成持续时间通常会缩短。 可以理解,对于驾乘者和驾乘操作者有益的是允许在单次驾乘中转弯、在导轨和 缆线之间切换、在被管控的速度中切换以及可以在单次运行中具有多个驾乘者并提供对于 吊运车运行必不可少的所有必要安全特征和冗余度。应当理解,娱乐性滑索应用是吊运车 和所描述的其他方面的一种可能应用,然而其他应用、如紧急疏散应用、也可能是这样的吊 运车和相关的轨道和缆线的重要的商业用途。 本文描述的吊运车系统和相关的导轨和轨道试图解决上述缺陷中的至少一些或 至少为公众提供选择。 根据仅作为示例给出的随后描述,吊运车系统以及相关的导轨和轨道的其他方面 和优点将变得显而易见。
技术实现要素:
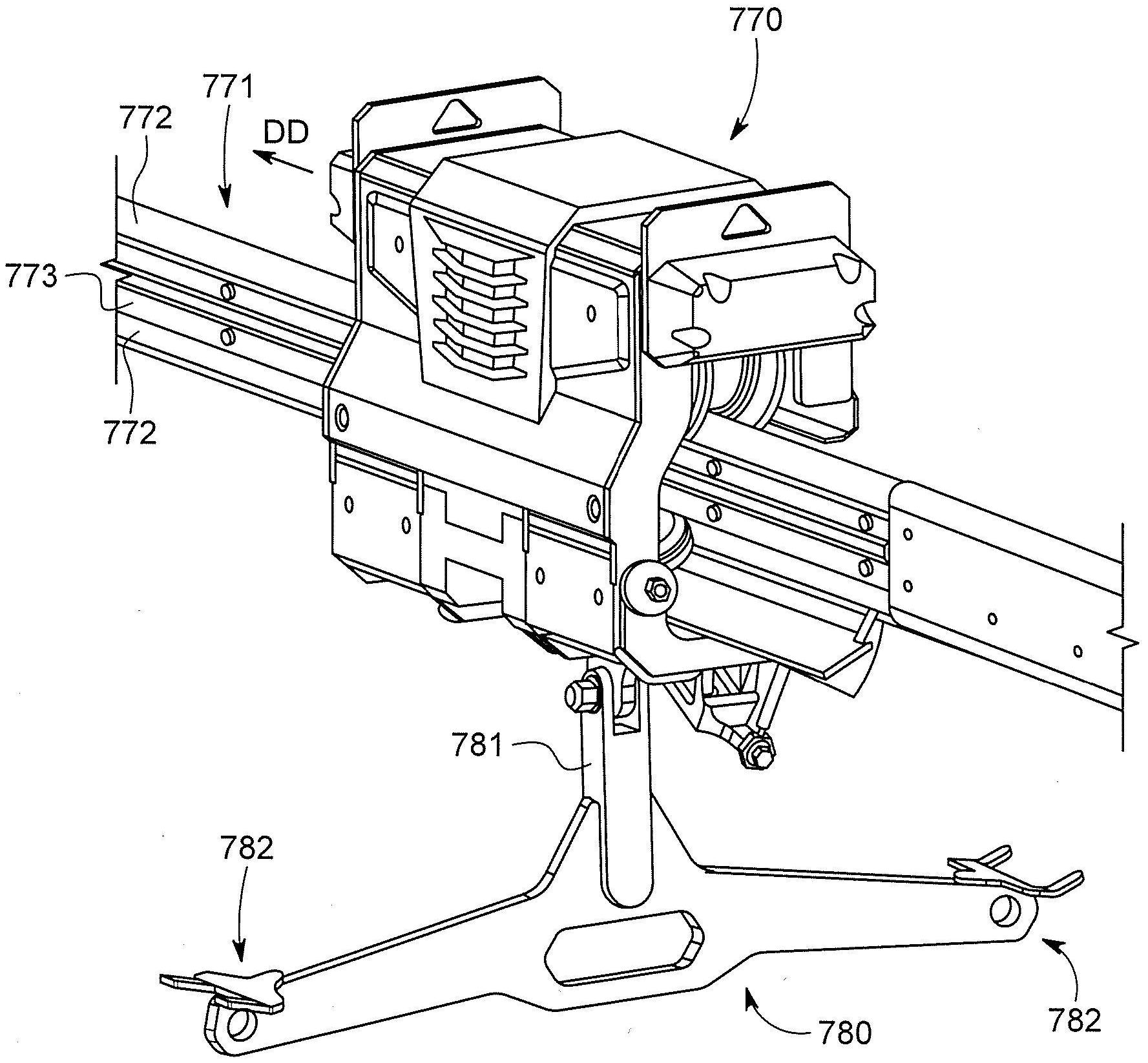
本文描述了对吊运车系统以及相关的导轨和轨道的改进。更具体地,吊运车可以 具有集成的制动系统,该制动系统可以适于基于各种控制输入(内部的或外部的)使驾乘者 6 CN 111601749 A 说 明 书 2/42 页 减速或停止。轨道系统可以由与切换系统互连的一系列张紧的缆线或轨道形成。吊运车和 轨道可以设计成相结合并允许吊运车穿过切换元件而从一个区段切换到下一区段上。轨道 系统可以配装有附加制动元件以阻滞吊运车的运动。另外,轨道可以配装有将外部输入提 供到吊运车中以改变吊运车的制动操作的其他元件。 在第一方面,提供了一种吊运车系统,该吊运车系统构造为配装至轨道系统以及 可选地自所述轨道系统拆离,所述吊运车系统构造为沿所述轨道系统横移,所述吊运车系 统包括: 本体, 本体的构造为与一物体关联的一部分, 轮,以及 集成制动系统,所述集成制动系统对吊运车的一个或多个轮施加制动力,所述一 个或多个轮在轨道和吊运车本体以及、如果存在、与吊运车关联的物体之间传递径向载荷 和侧向载荷。 在第二方面,提供了一种轨道系统,该轨道系统构造为输送基本如上所述的至少 一个吊运车系统。 在第三方面,提供了一种系统控制装置,该系统控制装置构造为感测基本如上所 述的至少一个吊运车系统的至少一个方面。 在第四方面,提供了一种娱乐性驾乘装置,其包括基本如上所述的至少一个吊运 车系统。 在第五方面,提供了一种安全和应急离开装置,其包括基本如上所述的至少一个 吊运车系统。 在第六方面,提供了一种货物和材料运输系统,其包括至少一个基本如上所述的 至少一个吊运车系统。 在第七方面,提供了一种沿轨道系统传递基本如上所述的吊运车系统并且基于至 少一个输入信号调节吊运车系统的制动的方法。 附图说明 根据仅以示例方式并参照附图给出的以下描述,吊运车系统以及相关的导轨和轨 道的其他方面将变得显而易见,在附图中: 图1示出了可能的滑索应用的实施例; 图2示出了可能的工业用离开滑索应用的替代实施例; 图3示出了紧急疏散应用,其中缆线的倾斜度和下垂程度可能显著地变化; 图4示出了吊运车制动技术的可能构型; 图5示出了示出当从缆线切换到轨道上时的制动器运动的示意图; 图6示出了示出从轨道到吊运车的替代输入信号的示意图; 图7示出了示出在没有施加调节时的停止距离的变化的曲线图; 图8示出了示出使用调节制动器(可变功率制动器)时的停止距离的曲线图; 图9示出了示出调节制动器借助与磁路发生干涉而实现的作用(涡流制动器(ECB) 响应)的曲线图; 7 CN 111601749 A 说 明 书 3/42 页 图10示出了示出借助对导体相对于磁路的位置进行调整而实现的制动器的调节 功率的曲线图; 图11示出了吊运车的一种可能实施例的图像; 图12示出了将吊运车装载在缆线上以及吊运车和缆线固定在一起之后的相互作 用的示意图; 图13示出了从迎面的方向观察时吊运车从缆线切换到轨道的示意图; 图14示出了吊运车向远处(逆向)移动时吊运车从缆线切换到轨道的示意图。 图15示出了吊运车在缆线和轨道上时的门控动作的示意图; 图16示出了从缆线到轨道的可能切换; 图17示出了紧急疏散应用的示例—装载和卸载; 图18示出了迎面而来的吊运车的示意图以及向外运动和驾乘者向外摆动的含义; 图19示出了仿形切割成的并且支撑圆形导轨的平坦板的示例; 图20示出了现有技术的次级连接的示例; 图21示出了可能的剪式件型次级连接的实施例和构型; 图22示出了线性涡流制动系统的实施例; 图23示出了晾衣绳式制动系统; 图24示出了具有线性涡流制动器(ECB)制动导轨的可能的外部制动器构型; 图25示出了可能的装载站的示意图; 图26示出了可能的预发过程的示意图; 图27示出了滑索驾乘者采取的示例路线图; 图28示出了交汇平台的示例; 图29示出了可能的终端卸载站的示例; 图30示出了替代滑索吊运车实施例的立体图; 图31示出了图30的替代滑索吊运车实施例的后侧平面图; 图32示出了图30的替代滑索吊运车实施例的前侧平面图; 图33示出了图30的滑索吊运车实施例的引导面附近的正视图; 图34示出了轨道的导入区段的立体图; 图35示出了图34的轨道的导入区段的俯视图; 图36示出了图34的轨道的导入区段的侧视图; 图37示出了图34的轨道的导入区段的端部视图; 图38示出了图30中示出的实施例的滑索吊运车沿图34中的导入段横移时、在去除 侧部的情况下的侧视图; 图39示出了图30中示出的实施例的滑索吊运车沿图34中的导入段横移时、在去除 侧部的情况下的侧视图; 图40示出了图30中示出的实施例的滑索吊运车沿轨道区段横移时的立体图,导入 区段位于该图的右侧,中部轨道区段是其上定位有滑索吊运车的区段并且轨道的导出区段 朝向如图所示的轨道区段的左手侧; 图41示出了图40中示出的轨道区段的侧视图; 图42示出了图41中示出的轨道区段的俯视图; 8 CN 111601749 A 说 明 书 4/42 页 图43示出了图30中示出的实施例的滑索吊运车沿轨道的导出区段横移时、在去除 侧部的情况下的侧视图; 图44示出了图30中示出的实施例的滑索吊运车沿轨道的导出区段横移时、在去除 侧部的情况下的侧视图; 图45示出了图30的滑索吊运车实施例在切换到轨道区段之前沿缆线横移; 图46示出了图30的滑索吊运车实施例,该吊运车从缆线沿导入区段或切换区段上 移到导轨; 图47示出了图30的滑索吊运车实施例,该吊运车在切换到轨道区段期间与进入凸 缘相互作用; 图48示出了图30的滑索吊运车实施例,该吊运车绕轨道区段移动; 图49示出了图30的滑索吊运车实施例,该吊运车绕轨道区段移动; 图50示出了图30的滑索吊运车实施例,该吊运车即将从轨道区段离开并切换到新 的缆线区段上; 图51示出了图30的滑索吊运车实施例,其中在开始缆线的移动之前前门撞击撞杆 并向下枢转回到闭合位置; 图52示出了图30的滑索吊运车实施例,该吊运车已朝向新的缆线区段略微进一步 向前横移,前门现在锁定闭合并且尾门现在也闭合;和 图53示出了图30的滑索吊运车实施例,该吊运车已完全移动到缆线的下一区段 上,其中门处于闭合状态; 图54示出了图30的滑索吊运车实施例中所用的本体区段的立体图; 图55示出了图30的滑索吊运车实施例中所用的本体区段的俯视图; 图56示出了图30的滑索吊运车实施例中所用的本体区段的主视图; 图57示出了从图30的滑索吊运车实施例中所用的本体区段的第一侧观察的视图; 图58示出了超速组件的实施例的立体图,其中滚珠轴承磁性地吸引至转子; 图59以主视截面图和侧视截面图示出了图58的实施例; 图60示出了混合轮的立体图; 图61示出了混合轮的立体截面图; 图62示出了在组装完成的ECB组件情况下的实施例的立体组装状态图; 图63示出了ECB组件的侧视截面图; 图64单独示出了ECB组件的导体组件的立体图; 图65单独示出了导体组件的侧视截面图; 图66单独示出了磁体阵列的立体图; 图67单独示出了磁体阵列的侧视截面图; 图68单独示出了调节机构的立体图; 图69单独示出了调节机构的后视截面图; 图70示出了磁体阵列的细节立体图,该磁体阵列可以定位于在轨道翅片之上经过 的吊运车上; 图71示出了穿过图70中示出的吊运车磁体阵列的翅片的侧视截面图; 图72示出了替代门控实施例的立体图;和 9 CN 111601749 A 说 明 书 5/42 页 图73示出了在上述替代门控实施例中与轨道的一区段相互作用的门控支托轮的 立体细节图; 图74示出了在上述替代门控实施例中与轨道的一区段相互作用的门控支托轮的 主视截面图; 图75示出了吊运车制动器传动装置的立体图,其中将罩部移除以示出带传动装置 和上部轮; 图76示出了上述吊运车制动器传动装置在移除罩部的情况下的主视图; 图77示出了另一替代吊运车实施例; 图78示出了扩杆的细节立体图; 图79示出了扩杆和连杆的细节截面立体图; 图80示出了扩杆和连杆的细节截面立体图; 图81示出了替代切换段; 图82示出了图81的与斜面区段配合的切换段; 图83示出了基于图77的实施例的吊运车机架的细节立体图; 图84示出了图77的吊运车实施例在沿导轨横移时的主视图; 图85示出了图77的吊运车的门控实施例的细节图,其处于轨道的开启导轨横移区 段; 图86示出了图77的吊运车的门控实施例的细节图,其处于轨道的闭合缆线横移区 段; 图87示出了图77的吊运车在中间对准时在切换段上进行切换的立体图; 图88示出了图77的吊运车在切换段与吊运车重新对准之前在偏离位置时在切换 段上进行切换的立体图。 图89示出了缆线到导轨的切换段的立体图; 图90以正视图示出了与图89相同的切换段;和 图91示出了图89和图90的实施例的缆线到切换段的进入点的细节立体图。











