
技术摘要:
本发明提供了一种具有施药功能的磁驱动胶囊内窥镜机器人,包括前部端盖、图像采集模块和施药模块。所述施药模块包括磁驱动器和储存液态药物的药物储存腔,所述磁驱动器包括第一永磁体和第二永磁体,通过施加外磁场使所述第一永磁体、第二永磁体产生旋转和相对轴向平移 全部
背景技术:
胶囊内窥镜是一种口服式检查设备,主要用于监测人体消化道的健康状况。相比 于传统的胃镜和肠镜,这种检查方法给患者造成的痛苦小,操作简单,患者的接受度高。因 此,其市场应用前景广泛,国内外均有厂家在研发和生产。目前商用胶囊内窥镜的缺陷在于 其功能都局限于图像采集。根据临床使用的反馈,医生在对患者的消化道进行检查时也希 望可以使用胶囊内窥镜对一些已知的病灶组织进行施药治疗。这就要求胶囊内窥镜能够集 成施药功能以满足临床需求。现有的一些研究尝试在胶囊内窥镜内部使用电机,或者弹簧 等装置驱动施药机构进行施药操作,并利用动物组织成功进行了体外实验。但是,这些方法 仍然存在体积大,能耗高,结构复杂,施药量不能调节等缺点,限制了其实际应用。并且目前 的研究中,施药机构都是从胶囊内窥镜的侧面(即径向)排出药物,导致位于头部的摄像头 (摄像头的摄像范围主要为轴向)难以实时监控整个施药过程,增大了医生判断施药效果的 难度。
技术实现要素:
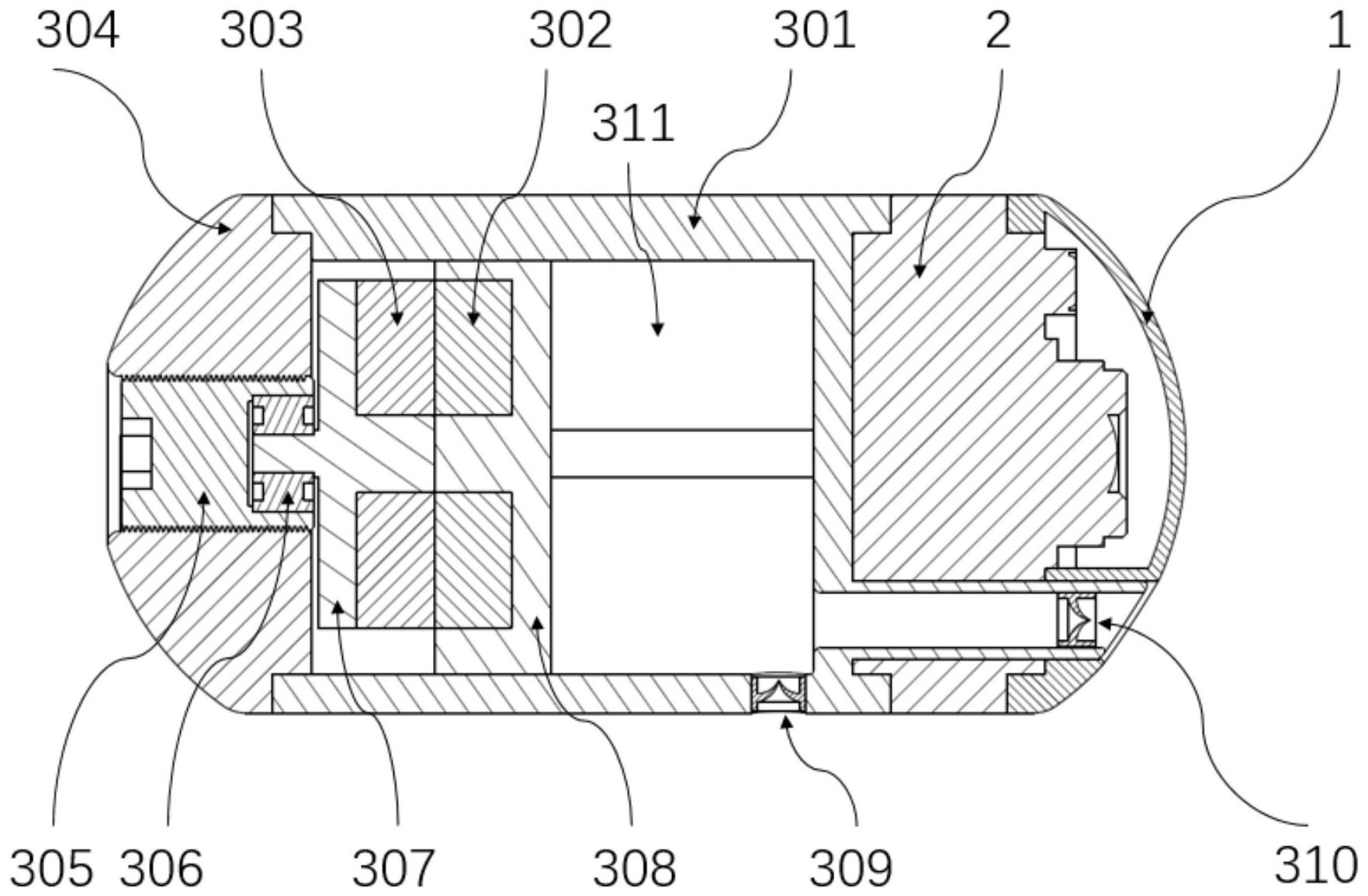
为了解决现有技术中的问题,本发明提供了一种具有施药功能的磁驱动胶囊内窥 镜机器人。 本发明提供了一种具有施药功能的磁驱动胶囊内窥镜机器人,包括前部端盖、图 像采集模块和施药模块。所述施药模块包括磁驱动器和储存液态药物的药物储存腔,所述 磁驱动器包括第一永磁体和第二永磁体,通过施加外磁场使所述第一永磁体、第二永磁体 产生旋转和相对轴向平移运动,从而挤压所述药物储存腔,使所述药物储存腔内的液态药 物通过送药管从所述前部端盖排出,所述液态药物的排出方向与所述图像采集模块的摄像 方向相同。 作为本发明的进一步改进,所述第一永磁体、第二永磁体均为径向充磁的圆环型 永磁体。 作为本发明的进一步改进,所述施药模块还包括外壳、尾部端盖、旋转底座、平移 底座,所述外壳为圆柱形壳体,所述外壳的尾端与所述尾部端盖连接,所述外壳的前端与所 述图像采集模块的尾端连接,所述图像采集模块的前端与所述前部端盖连接,所述旋转底 座、平移底座均位于所述外壳之内,所述第二永磁体固定在所述旋转底座上,所述旋转底座 与所述尾部端盖旋转连接,所述第一永磁体固定在所述平移底座上,所述平移底座与所述 外壳构成移动副,所述平移底座的前端面与所述外壳的内壁之间的封闭空间构成了所述药 物储存腔。 作为本发明的进一步改进,所述外壳的后端为开放端,所述外壳的前端为封装端, 所述平移底座的前端面与所述外壳的内侧面以及封装端之间相互围合形成的密闭空间为 4 CN 111568347 A 说 明 书 2/5 页 所述药物储存腔,所述外壳的前端设有送药管,所述送药管贯穿所述图像采集模块、前部端 盖,所述送药管与所述药物储存腔连通,所述送药管上设有出药单向阀,所述外壳上设有进 药通孔,所述进药通孔与所述药物储存腔连通,所述进药通孔上设有进药单向阀。 作为本发明的进一步改进,所述前部端盖上设有避让所述送药管的第一避让通 孔,所述图像采集模块上设有避让所述送药管的第二避让通孔,所述送药管依次穿过所述 第二避让通孔、第一避让通孔。 作为本发明的进一步改进,所述尾部端盖、旋转底座、平移底座、第一永磁体、第二 永磁体、外壳、图像采集模块、前部端盖的轴线相重合。 作为本发明的进一步改进,进药单向阀和出药单向阀使用弹性材料制造。 作为本发明的进一步改进,所述旋转底座呈圆盘型,两端面各有一圆柱轴特征,圆 柱轴直径有大小差异。所述第二永磁体具有径向充磁的圆环型特征,第二永磁体通过内圆 与旋转底座上直径较大的圆柱轴构成过盈配合,从而固定于旋转底座上。所述轴承的内圈 通过轴孔配合与旋转底座上直径较小的圆柱轴相连接。所述尾部端盖呈半球型,带有螺纹 通孔特征。所述调整螺柱为圆柱型,其中一端面带有六角沉孔特征,另一端面带有圆形沉孔 特征,圆柱面上攻有螺纹特征。所述调整螺柱与尾部端盖之间通过螺纹连接。调整螺柱上的 六角沉孔可与六角扳手配合使用。所述轴承外圈与调整螺柱的圆形通孔之间通过轴孔配合 相连接。这样,所述第二永磁体与旋转底座就通过轴承和调整螺柱固定在了尾部端盖上,并 且相对于尾部端盖构成一个旋转运动副。所述施药模块的外壳呈圆柱型,具有三个矩形滑 轨特征、通孔特征和圆柱型的送药管特征。所述尾部端盖嵌套安装于外壳上。所述平移底座 呈圆柱型,圆柱面上带有三个矩形通槽特征,一个端面带有圆环形凹槽特征。所述平移底座 可通过三个矩形通槽与外壳上的三个矩形滑轨配合,从而构成一个直线运动副。所述平移 底座与外壳之间共同构成一个密闭空间作为药物储存腔。平移底座的圆柱面与外壳内壁之 间为间隙配合。所述第一永磁体具有径向充磁的圆环型特征,嵌套固定于平移底座的圆环 形凹槽内。因此,第一永磁体可带动平移底座沿外壳的矩形滑轨做平移运动。所述进药单向 阀安装于外壳上的通孔内,可在一定压力下单向打开。所述出药单向阀安装于外壳上的圆 柱型送药管内,可在一定压力下单向打开。所述图像采集模块嵌套安装于外壳的一端,具有 通孔特征。所述前部端盖嵌套安装于图像采集模块上,具有通孔特征。外壳上的送药管穿过 图像采集模块和前部端盖上的通孔将液态药物送至外界。综上所述,给施药模块施加一个 外磁场可以驱动两个永磁体产生相对旋转运动,并且相互之间因为产生了排斥力而远离。 其中第二永磁体轴向保持固定,第一永磁体带动平移底座沿外壳上的矩形滑轨做平移运 动,推动液态药物通过送药管从胶囊内窥镜机器人的头部排出。 作为本发明的进一步改进,施药机构采用两个永磁体作为驱动器。施加外磁场后, 利用两个永磁体之间的相对旋转和轴向平移运动推动液态药物排出。 作为本发明的进一步改进,通过调整螺母可在一定范围内对药物储存腔的容积做 无极平滑调整。 作为本发明的进一步改进,液态药物沿轴向由胶囊内窥镜机器人的头部排出。 作为本发明的进一步改进,所述进药单向阀和出药单向阀使用弹性材料制造,并 且可在一定压力下单向打开。 作为本发明的进一步改进,所述第一永磁体、第二永磁体的外型包括但不限于圆 5 CN 111568347 A 说 明 书 3/5 页 环型,制造第一永磁体、第二永磁体的材料包括但不限于钕铁硼材料。 作为本发明的进一步改进,所述前部端盖使用透明材料制造。 本发明的有益效果是:通过上述方案,在胶囊内窥镜机器人中增加了施药模块使 其具备了施药功能,施药模块的施药方向与图像采集模块的摄像方向一致,可以实时监控 整个施药过程,并且施药量可调节;施药模块结构简单、高效;施药模块的驱动力来自外磁 场,无需消耗胶囊内窥镜机器人自身的能量。 附图说明 图1是本发明一种具有施药功能的磁驱动胶囊内窥镜机器人的分解示意图。 图2是本发明一种具有施药功能的磁驱动胶囊内窥镜机器人的剖视图。 图3是本发明一种具有施药功能的磁驱动胶囊内窥镜机器人的施药模块的分解示 意图。 图4是本发明一种具有施药功能的磁驱动胶囊内窥镜机器人的施药模块的初始状 态图。 图5是本发明一种具有施药功能的磁驱动胶囊内窥镜机器人的施药模块施药后的 状态图。 图6是本发明一种具有施药功能的磁驱动胶囊内窥镜机器人的药物储存腔容积调 整原理示意图。











