
技术摘要:
本发明公开了一种虚拟网球运动动作捕捉方法及系统,将传感器分别固定在人体上和球拍上、网球内,为人体、球拍、网球内设置跟踪点,并将人体上采集的数据、球拍上采集的数据与网球的位置数据进行比较,输出判断的正拍、反拍、球拍触球和球是否落在界限内的结果,无需动 全部
背景技术:
计算机的发展使人们可以在计算机上进行网球游戏,最初的游戏都是仅供娱乐 的,随着虚拟现实技术在计算机的基础上发展起来,人们利用虚拟现实技术使各种游戏更 加有沉浸感,目前,很多的体育运动都在虚拟现实的技术支持下变得更加多元化,人们可以 进行虚拟的训练。我国的网球正在飞速发展,虚拟现实的发展也为网球训练贡献了一份力 量。 目前,有很多的虚拟网球游戏,例如有的只是用鼠标键盘来控制击打球。使用计算 机鼠标键盘其实质只是使用了人的双手,与真实的网球运动训练相差甚远,那么所有的运 动都可以这样,所以这只是一种单纯使用大脑判断什么时候使用什么动作的以网球为主题 的游戏而已。有的虽然有重力传感器、陀螺仪等一些硬件,但是没有给出空间位置信息,不 能准确判断是否击打到球;还有的虽然也会给出空间位置信息,但是人的动作根本无法判 断,只需要把球拍放到球到达的位置击打球即可,有些动作对于人的身体是有危害的,故这 种并不能达到训练的目的,有时候还会对人体造成伤害。
技术实现要素:
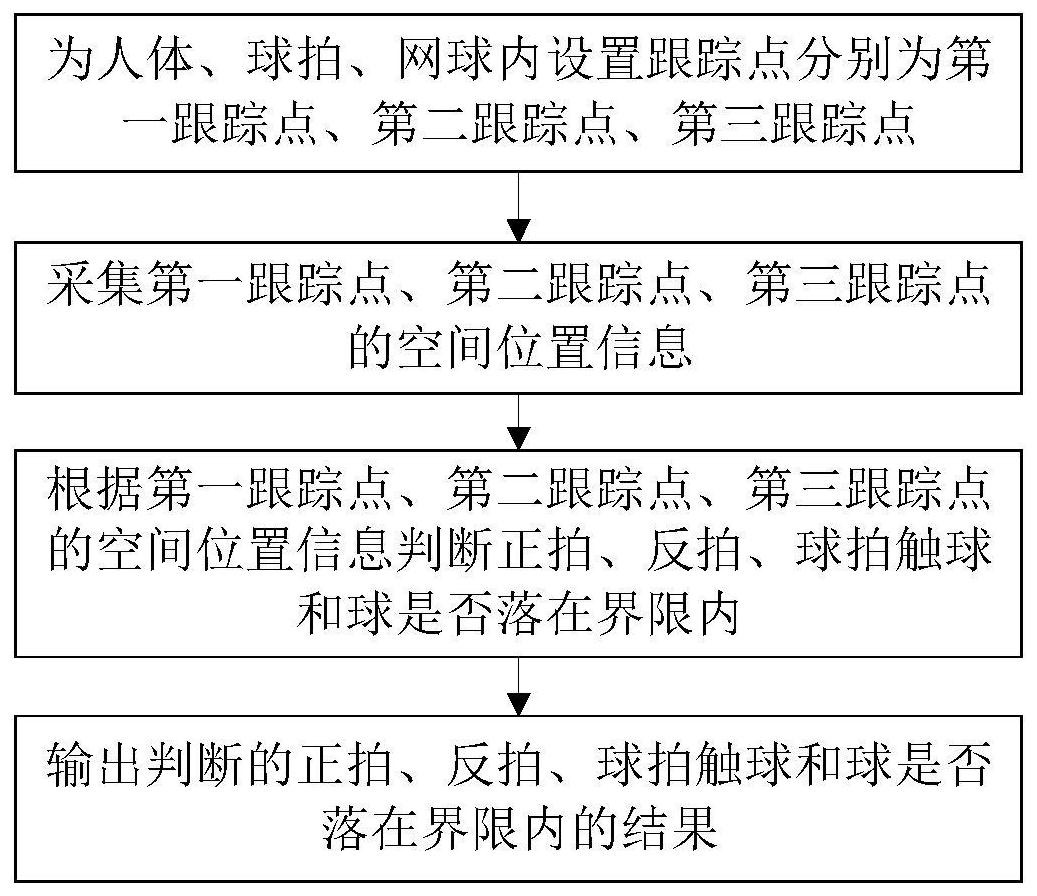
本发明的目的在于提出一种虚拟网球运动动作捕捉方法及系统,以解决现有技术 中所存在的一个或多个技术问题,至少提供一种有益的选择或创造条件。 为解决上述问题,本公开提供一种虚拟网球运动动作捕捉方法及系统的技术方 案,将传感器分别固定在人体上和球拍上、网球内,为人体、球拍、网球内设置跟踪点,并将 人体上采集的数据、球拍上采集的数据与网球的位置数据进行比较,输出判断的正拍、反 拍、球拍触球和球是否落在界限内的结果。 为了实现上述目的,根据本公开的一方面,提供一种虚拟网球运动动作捕捉方法, 所述方法包括以下步骤: S100,为人体、球拍、网球内设置跟踪点分别为第一跟踪点、第二跟踪点、第三跟踪 点; S200,采集第一跟踪点、第二跟踪点、第三跟踪点的空间位置信息; S300,根据第一跟踪点、第二跟踪点、第三跟踪点的空间位置信息判断正拍、反拍、 球拍触球、和球是否落在界限内;(正拍、反拍、球拍触球、和球是否落在界限内) S400,输出判断的正拍、反拍、球拍触球和球是否落在界限内的结果。 进一步地,在S100中,所述跟踪点为用户在空间坐标中设置的特征点,代表了空间 位置坐标值,跟踪点处设置有UWB(超宽带(Ultra Wide Band,UWB))定位标签。 进一步地,在S200中,采集第一跟踪点、第二跟踪点、第三跟踪点的空间位置信息, 4 CN 111589165 A 说 明 书 2/5 页 的方法为通过UWB定位标签采集第一跟踪点、第二跟踪点、第三跟踪点的空间位置信息,第 一个跟踪点代表人体的空间位置信息,第二个代表网球拍的空间位置信息,第三个代表网 球的空间位置信息,空间位置信息为坐标值。 进一步地,在S300中,根据第一跟踪点、第二跟踪点、第三跟踪点的空间位置信息 判断正拍、反拍、球拍触球和球是否落在界限内的方法为: 令第一跟踪点、第二跟踪点、第三跟踪点这三个跟踪点对应的坐标分别为(x1,y1) , (x2,y2) ,(x3,y3),三个跟踪点即为空间位置信息,令第一跟踪点和第二跟踪点的距离为d1, 第二跟踪点和第三跟踪点的距离为d2,第一跟踪点和第三跟踪点的距离为d3,根据几何关系 得到: 设第一跟踪点、第二跟踪点、第三跟踪点这三个跟踪点构成的三角形中角θ1所对 应的边长是d1(即,三角形的内角θ1所朝向的边为的边长是d1),角θ2所对应的边长是d2(即, 三角形的内角θ2所朝向的边为的边长是d2),角θ3所对应的边长是d3(即,三角形的内角θ3所 朝向的边为的边长是d3),则有: cosθ1=(d 23 d 22 -d 21 )/2d2d1; 计算出角θ1的角度值; 当θ1>30°且x2>x3判定为正拍; 当θ1>90°且x2











