
技术摘要:
本申请提供一种工业机器人定位误差补偿方法,包括:根据工业机器人的任务选定工作空间,在工作空间中选取多组样本数据,每组样本数据包括工业机器人末端的目标指令位置以及目标指令位置对应的位置误差;建立目标指令位置与位置误差之间的映射关系,从而得到工作空间中 全部
背景技术:
目前,工业机器人已经广泛应用于安装、搬运、生产线和精加工等工业生产的各个 领域,以提升重复工作的生产效率和精度。作为工业机器人重要的性能指标,定位精度直接 影响其加工件和装配件的质量。定位精度分为重复定位精度和绝对定位精度,工业机器人 通常具有较高的重复定位精度,但是绝对定位精度比较差。因此,研究提高工业机器人的定 位精度的方法是很有必要的。 目前提高工业机器人定位精度的方法主要有两种:误差预防法和误差补偿法。前 者是从误差源方面对工业机器人定位精度进行控制,主要通过提高机器人设计精度、加工 精度和装配精度减少误差源。但是该方法需要确保在机器人加工生产过程中的精度,而且 对核心零部件的精度要求也较高,导致生产成本增加。因此,该方法的普适性较差。后者为 运动学标定补偿方式。运动学参数标定使用先进的测量技术辨识工业机器人运动学模型中 各项参数的准确值,通过修改工业机器人控制器中的参数或者增加一定的控制算法以提高 定位精度。但是,该方法成本较高,较难实现,并且无法考虑到实际负载、温度和重力分布等 因素的影响。
技术实现要素:
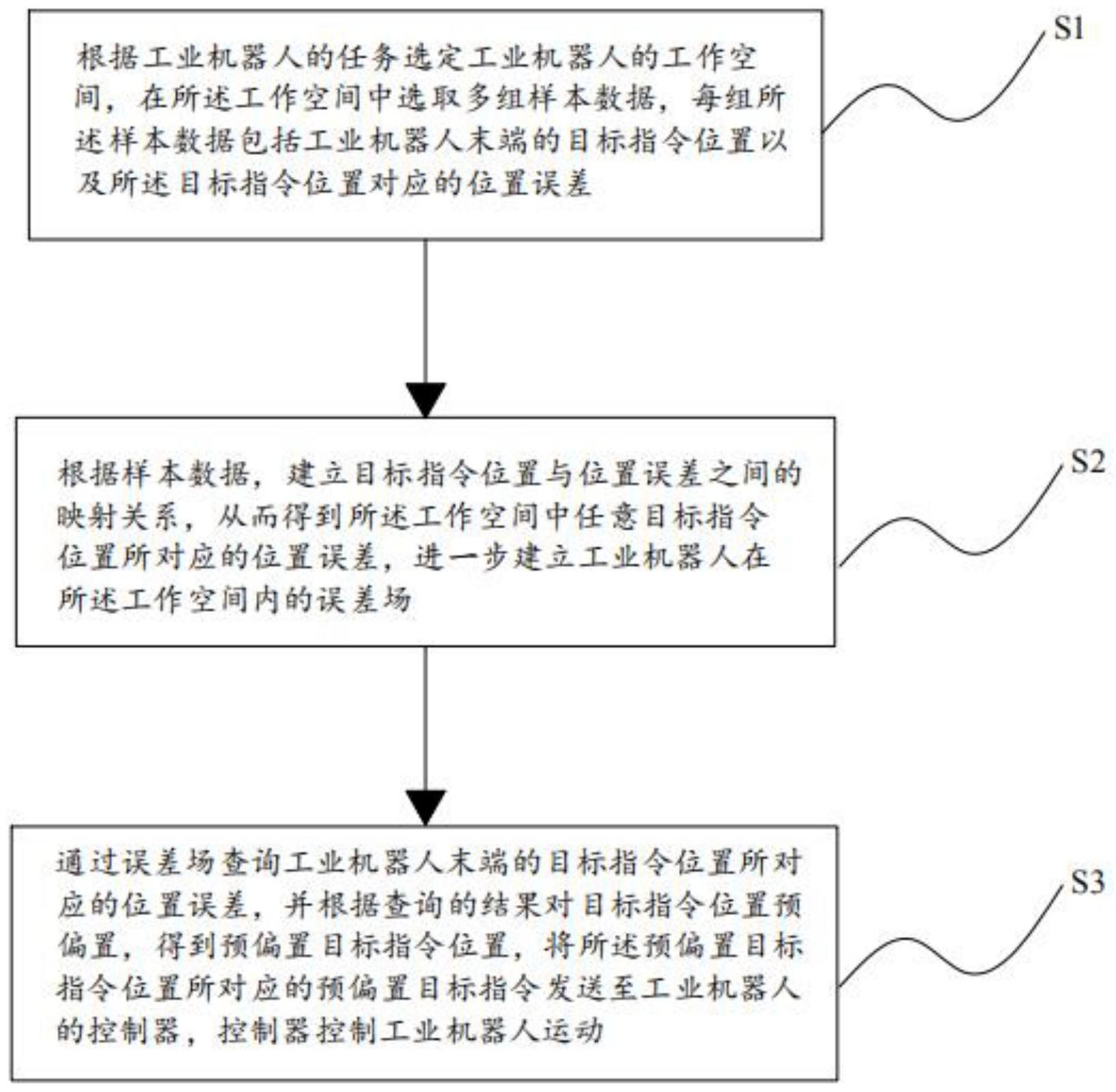
本申请的目的是针对以上问题,提供一种工业机器人定位误差补偿方法。 本申请提供一种工业机器人定位误差补偿方法,所述方法包括如下步骤: S1、根据工业机器人的任务选定工业机器人的工作空间,在所述工作空间中选取 多组样本数据,每组所述样本数据包括工业机器人末端的目标指令位置以及所述目标指令 位置对应的位置误差; S2、根据样本数据,建立目标指令位置与位置误差之间的映射关系,从而得到所述 工作空间中任意目标指令位置所对应的位置误差,进一步建立工业机器人在所述工作空间 内的误差场; S3、通过误差场查询工业机器人末端的目标指令位置所对应的位置误差,并根据 查询的结果对目标指令位置预偏置,得到预偏置目标指令位置,将所述预偏置目标指令位 置所对应的预偏置目标指令发送至工业机器人的控制器,控制器控制工业机器人运动。 根据本申请某些实施例提供的技术方案,所述步骤S1中,在所述工作空间中,通过 拉丁超立方采样的方法选取多组样本数据。 根据本申请某些实施例提供的技术方案,所述步骤S1中,在获取目标指令位置对 应的位置误差的方法为:当工业机器人末端运行到目标指令位置后,利用测量设备测量工 业机器人的实际位置,将实际位置与目标指令位置相减,即可得到位置误差。 根据本申请某些实施例提供的技术方案,所述测量设备为激光跟踪仪。 3 CN 111590569 A 说 明 书 2/4 页 根据本申请某些实施例提供的技术方案,所述步骤S2中,建立目标指令位置与位 置误差之间的映射关系时,采用径向基神经网络进行拟合。 根据本申请某些实施例提供的技术方案,将所选定的工业机器人的工作空间分割 成多个小的立方体区域;在每个小的立方体区域内选取样本数据,并根据样本数据建立每 个小的立方体区域的误差场,进而得到整个工作空间的误差场。 与现有技术相比,本申请的有益效果:该工业机器人定位误差补偿方法成本低且 容易实现,在利用工业机器人执行任务之前,在实际的工作环境中获取样本数据,考虑到工 业机器人实际负载、温度和重力分布等因素的影响;该方法只需根据获取的样本数据建立 误差场,再根据误差场生成预偏置目标指令发送给工业机器人执行即可,无需对工业机器 人控制器的参数进行修改,也无需增加控制算法,因此成本低易实现。 附图说明 图1为本申请实施例提供的工业机器人定位误差补偿方法的补偿系统的示意图; 图2为本申请实施例提供的工业机器人定位误差补偿方法的流程图; 图3为本申请实施例提供的工业机器人定位误差补偿方法的误差场的示意图; 图4为本申请实施例提供的工业机器人定位误差补偿方法的补偿前后的位置误差 对比图。 图中所述文字标注表示为: 1、工业机器人;2、控制柜;3、示教器;4、立方体区域;5、测量设备;6、末端。











