
技术摘要:
本发明公开了一种水下焊接机器人的爬行机构,包括电气箱、左传动箱和右传动箱,左传动箱和右传动箱分别转动安装有左从动轴、右从动轴、左主动轴和右主动轴并分别安装有链轮,左传动箱和右传动箱上分别固定有左潜水电动机和右潜水电动机,左传动箱和右传动箱内分别安装 全部
背景技术:
近年来由于大型船舶、水下钻井平台等的维护以及海洋工程的发展,迫切需要水 下焊接技术,水下焊接机器人的研制就是为满足这种需要而提出的。水下焊接不同于陆上 焊接,有着其工作环境的特殊性。针对水下环境的特殊性我们必须采取一系列措施,在水下 进行焊接操作需要保证良好的密封性,避免控制元件浸水,同时还需要保证在水下船体上 能够有足够的附着力以方便爬行。而目前的水下焊接机器人的爬行机构一般有几种方式, 一种是采用磁吸式的吸附方式,一种采用真空吸附的方式,而磁吸式的方式相比真空吸附 更加可靠,因此被普遍采用。 而水下焊接机器人的爬行机构在移动上有几种行驶方式。 一种是车轮式移动方式,其原理是给机器人配置多个轮子由电机独立驱动每一个 轮子。其优点是移动速度快,转弯容易。但是由于其着地面积小,所以维持一定的吸附力困 难。 另一种是履带式移动方式,其原理是由电机驱动两个无轨道履带,使其前进或后 退。它的特点是着地面积大易产生较大的吸附力,对壁面的适应力强,其不足是体积大不易 实现转弯,并且还需单独配置转向机构。 最后一种行驶方式为步行式移动是靠多个脚或框架的反复吸附与脱落进行移动, 这种方式虽然承重能力好但是其最大的不足就是移动困难行走速度慢。
技术实现要素:
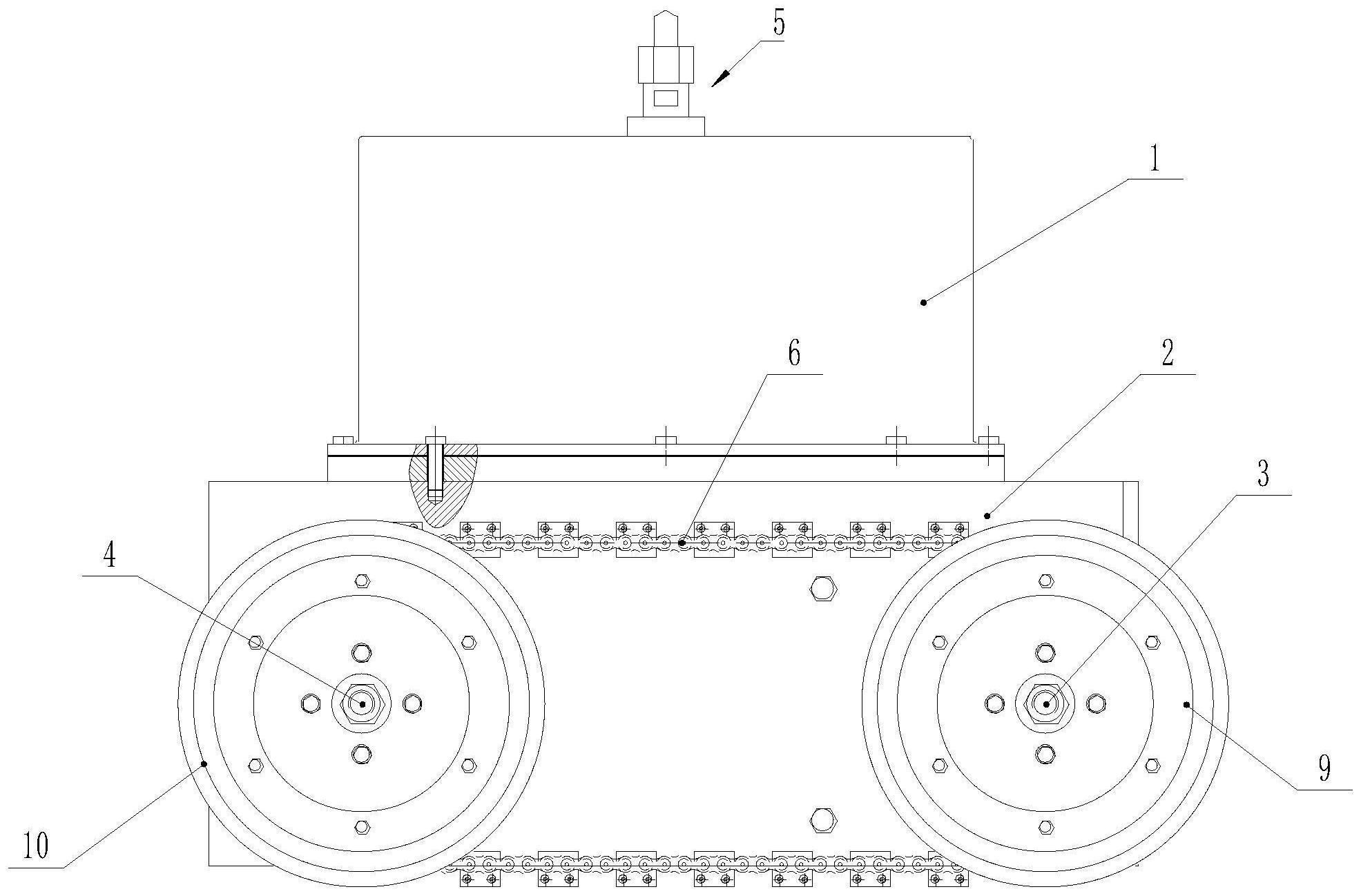
本发明所要解决的技术问题是:提供一种水下焊接机器人的爬行机构,该爬行机 构可以保证足够的附着力的情况下更好的实现转向,无需再设置转向机构,爬行动作可靠。 为解决上述技术问题,本发明的技术方案是:一种水下焊接机器人的爬行机构,包 括电气箱、左传动箱和右传动箱,所述电气箱固定于左传动箱和右传动箱的上方,所述左传 动箱和右传动箱分别转动安装有左从动轴和右从动轴,所述左从动轴和右从动轴的两侧分 别固定有左从动链轮和右从动链轮,所述左传动箱上转动安装有左主动轴,右传动箱上转 动安装有右主动轴,所述左传动箱和右传动箱上分别固定有左潜水电动机和右潜水电动 机,所述左传动箱和右传动箱内分别安装有左传动机构和右传动机构,所述左潜水电动机 的输出轴通过左传动机构与左主动轴传动连接,所述右潜水电动机的输出轴通过右传动机 构与右主动轴传动连接,所述左主动轴上固定有左主动链轮,所述右主动轴上固定有右主 动链轮,所述左主动链轮和左从动链轮之间安装有左循环链,所述右主动链轮和右从动链 轮之间安装有右循环链,所述左循环链和右循环链上均等间距固定安装有永磁铁;所述电 气箱内设置有控制潜水电动机工作的控制板,所述电气箱上设置有线束导出孔,所述线束 导出孔上安装有线束密封固定结构。 3 CN 111571084 A 说 明 书 2/4 页 作为一种优选的方案,所述左循环链和右循环链的结构相同,所述左循环链包括 第一左侧滚子链和第二左侧滚子链,所述第一左侧滚子链和第二左侧滚子链的相对侧分别 固定有左侧板和右侧板,所述永磁铁固定于左侧板和右侧板之间,所述永磁铁的外部包裹 有铁轭壳。 作为一种优选的方案,所述左侧板和右侧板分别通过螺纹销与第一左侧滚子链和 第二左侧滚子链固定,所述螺纹销作为第一左侧滚子链和第二左侧滚子链的销轴,所述永 磁铁与左侧板和右侧板之间通过连接螺栓固定。 作为一种优选的方案,所述左传动机构和右传动机构的结构相同且均为蜗轮蜗杆 机构。 作为一种优选的方案,所述电气箱包括箱底板和上箱体,所述箱底板和上箱体之 间设置有密封垫片并通过螺栓固定,所述线束导出孔和线束密封固定结构设置于上箱体的 顶部。 作为一种优选的方案,所述线束密封固定机构包括双头螺套,所述双头螺套的一 端螺纹安装于线束导出孔,所述双头螺套的内孔内安装有密封胶套,所述双头螺套的另一 端螺纹安装有压线套,线束从密封胶套的内孔和压线套的内孔贯穿伸出。 作为一种优选的方案,所述线束导出孔包括小径孔段和大径孔段,所述大径孔段 处于小径孔段的外侧且设置了内螺纹,所述大径孔段的底部台阶上设置有密封圈,所述双 头螺套的一端螺纹安装于大径孔段上且挤压所述密封圈。 作为一种优选的方案,所述密封胶套包括胶套本体和位于胶套本体外侧端的法兰 沿,所述法兰沿靠近边缘的厚度比靠近胶套本体的部位厚度更厚。 采用了上述技术方案后,本发明的效果是:1、该爬行机构采用了履带式的爬行结 构,这样接触面积大,并且更好的方便永磁铁的吸附,使其附着力满足焊接机器人的承载要 求;2、该爬行机器人的驱动采用左右两个传动箱进行分别控制,这样通过控制左循环链和 右循环链的运行速度就可以实现爬行机构直线运行或者转向,从而无需在额外的设置转向 机构,简化了结构,使整体的体积也减小;3、该爬行机构的电气箱利用了线束密封固定结构 将线束进行固定密封,从而使电气箱的密封性提高,减少电器元件浸水风险。 又由于所述左循环链和右循环链的结构相同,所述左循环链包括第一左侧滚子链 和第二左侧滚子链,所述第一左侧滚子链和第二左侧滚子链的相对侧分别固定有左侧板和 右侧板,所述永磁铁固定于左侧板和右侧板之间,所述永磁铁的外部包裹有铁轭壳,永磁铁 的安装非常方便,并且铁轭壳可以很好的传导磁感线。 又由于所述左侧板和右侧板分别通过螺纹销与第一左侧滚子链和第二左侧滚子 链固定,所述螺纹销作为第一左侧滚子链和第二左侧滚子链的销轴,所述永磁铁与左侧板 和右侧板之间通过连接螺栓固定,永磁铁的螺纹销可以作为滚子链条的销轴,组装更方便, 运动更顺畅稳定。 又由于所述线束导出孔包括小径孔段和大径孔段,所述大径孔段处于小径孔段的 外侧且设置了内螺纹,所述大径孔段的底部台阶上设置有密封圈,所述双头螺套的一端螺 纹安装于大径孔段上且挤压所述密封圈。这样,当双头螺套拧入到大径孔段时,其端部会挤 压密封圈,最终将双头螺套的端部和大径孔段密封,而线束和双头螺栓之间则直接通过密 封胶套密封,从而整体提高密封效果。 4 CN 111571084 A 说 明 书 3/4 页 又由于所述密封胶套包括胶套本体和位于胶套本体外侧端的法兰沿,所述法兰沿 靠近边缘的厚度比靠近胶套本体的部位厚度更厚,这样,在压线套挤压法兰沿时是与法兰 沿的边缘挤触,这样使密封胶套会进一步向中心挤压线束,随着压线套旋转的更紧,其挤压 力越大,密封效果更好。 附图说明 下面结合附图和实施例对本发明进一步说明。 图1是本发明实施例的结构示意图; 图2是图1的左视图; 图3是线束密封固定结构的剖视图; 图4是右传动箱的剖视图; 图5是图4在A-A处的剖视图; 图6是右循环链的俯视局部剖视图; 图7是右循环链的侧面局部剖视示意图; 附图中:1、电气箱;2.传动箱;21.右传动箱;211.箱体;212.蜗杆;213.蜗轮;214. 右潜水电动机;22.左传动箱;3.右从动轴;4.右主动轴;5.线束密封固定结构;51.双头螺 套;52.密封胶套;521.胶套本体;522.法兰沿;53.压线套;54.密封圈;6.右循环链;7.左循 环链;8.左主动轴;9.右从动链轮;10.右主动链轮;11.小径孔段;12.大径孔段。











