
技术摘要:
一种螺旋桨检测及互动装配设备,属于一种工业机器人教学实训设备技术领域,包括物料传递输送线,上料平台、搬运机器人、第一视觉检测机构、剔除机构、互动装配平台沿物料传递输送线的运动方向依次设置,位置检测机构设置在上料平台的上方靠近搬运机器人的一端,搬运机 全部
背景技术:
现有的机器视觉与工业互动平台一般都是采用多自由度机械手和多种不同功能 的模块相结合,功能模块一般包括码垛搬运模块,视觉识别与拾取模块,焊接模拟模块,或 者人机对弈模块,以上功能模块均是采用传感器、编码器结合来计算拾取位置、采用定位机 构来实现预设的拾取位置或者采用机器视觉拍照物料图像来计算出拾取位置,没有涉及到 人机交互,对于一些小型零件的装配,因为工件不规则,对工件的定位困难,很难实现全自 动的装配,此时采用全自动工序和半自动工序相结合能够实现对零件的快速装备,降低成 本。
技术实现要素:
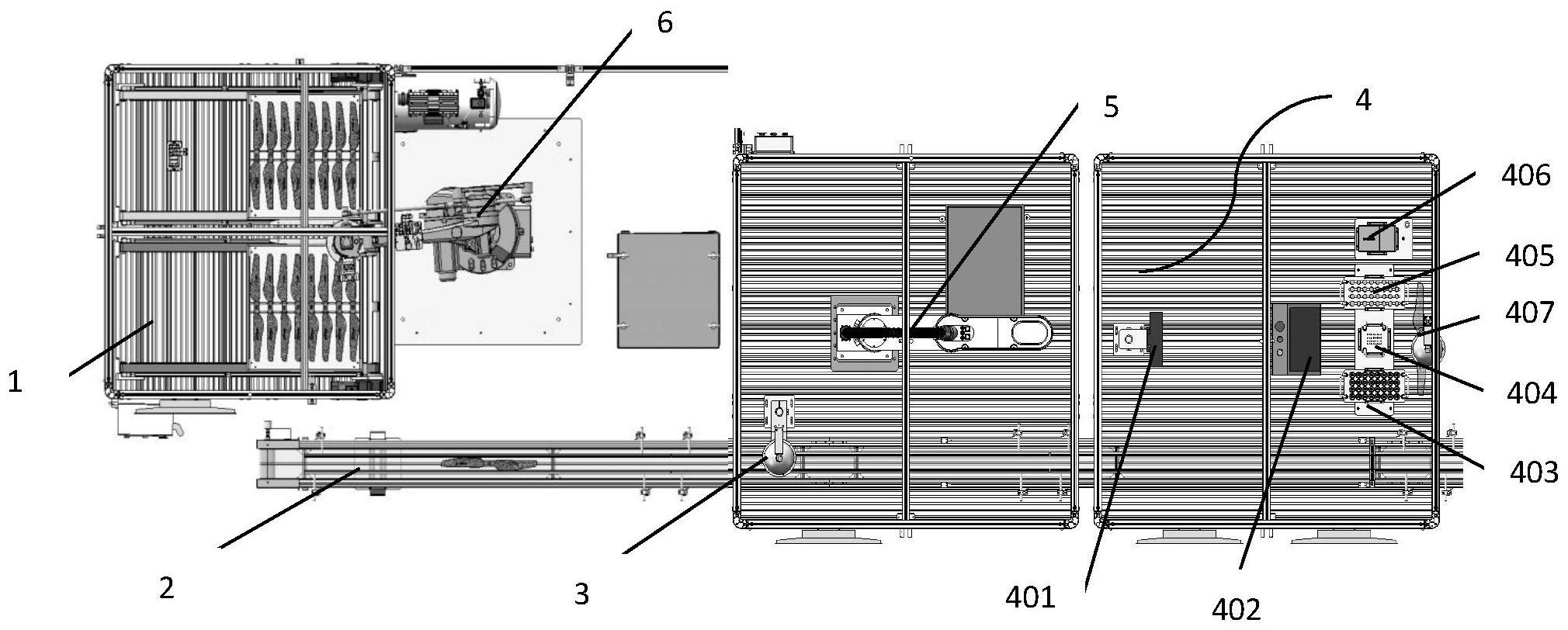
针对上述技术问题,本发明装置提供一种螺旋桨检测及互动装配设备,用于验证 人机交互、同时提供一种螺旋桨升力检测装置。 本发明采用的技术方案如下:一种螺旋桨检测及互动装配设备,包括物料传递输 送线,上料平台、搬运机器人、第一视觉检测机构、剔除机构、互动装配平台沿物料传递输送 线的运动方向依次设置,位置检测机构设置在上料平台的上方靠近搬运机器人的一端,搬 运机器人根据位置检测机构的检测位置从上料平台搬运螺旋桨放置到物料传递输送线上, 第一视觉检测机构对螺旋桨的表面划痕、商标印刷缺陷、螺旋桨类型检测,剔除机构对有残 次的螺旋桨进行剔除,人工装配台设置在互动装配平台远离剔除机构的一侧,互动装配平 台上设有体感相机,体感相机正对人工装配台,体感相机用于检测人工动作,三个料仓设置 在互动装配平台的上端面且位于体感相机和人工装配台置之间,料仓分别位于人工装配台 的前方、左侧和右侧,人工装配台的正上方设置第二视觉检测机构。 进一步的,位于人工装配台的前方的料仓用于放置锁轴垫片,两侧料仓分别用于 放置底座、上板。 进一步的,互动装配位还包括螺钉供料位,螺钉供料位设置在三个料仓远离物料 传递输送线的一侧。 进一步的,还包括螺旋桨升力检测机构,螺旋桨升力检测机构沿物料传递输送线 设置在互动装配平台的下游,螺旋桨升力检测机构的外部设置罩壳,人工装夹位设置在螺 旋桨升力检测机构远离互动装配平台的一侧。 进一步的,螺旋桨升力检测机构包括基板,电机支撑板滑动设置在基板上,轴支座 固定在电机支撑板的上端面,光轴一端固定在轴支座上,电机安装板固定在光轴的另一端, 电机设置在电机安装板上,快换接座安装在电机的输出轴上,压力传感器固定基板上,压力 传感器位于电机与电机支撑板之间。 4 CN 111571205 A 说 明 书 2/5 页 进一步的,还包括抱紧机构,立板设置在基板靠近电机的一侧,抱紧机构设置在立 板上,立板中开有通孔,螺旋桨升力检测机构贯穿通孔。 进一步的,还包括限位杆,限位杆的一端固定在电机安装板上,另一端位于快换接 座的一侧,限位杆用于检测螺旋桨底座与快换底座的装配情况,快换接座与抱紧机构沿快 换接座的圆周方向布置且互不干涉。 进一步的,上料平台包括平行设置的两个螺旋桨供料位,供料位分别用于输送装 有正螺旋桨和反螺旋桨的托盘,托盘包括底板和外部矩形框,外部矩形框固定在底板的上 端面,托盘包括两组设置在托盘中间的定位条,定位条上沿输送部运动方向设有均布的卡 槽,托盘底板中部设置至少两组定位条,定位条沿供料位的运动方向设置,定位条沿供料位 运动方向开有多个均布的卡槽,螺旋桨中部的两侧以及下侧面均与定位条中的卡槽接触。 进一步的,搬运机器人包括四轴码垛机械手本体和末端抓手,末端抓手包括吸取 抓手和夹取抓手,吸取抓手包括支柱和吸盘,支柱安装在四轴码垛机械手本体的末端法兰 上,吸盘安装在支柱的下端,绕线托盘设置在支柱外侧,绕线托盘沿圆周方向开有缺口槽且 沿竖直方向开有通孔,夹取抓手包括连接板和竖直气缸,连接板的一端与支柱固连,连接板 的中部穿过绕线托盘的缺口槽,直行气缸安装在连接板的另一端,手指气缸设置在直行气 缸的缸杆上,夹爪对称设置在手指气缸的活动端。 进一步的,还包括装配指导屏,装配指导屏与控制系统通讯,装配指导屏根据第二 视觉检测机构的检测结果显示下一步的装配指导。 有效效果:(1)该装置包括第一视觉检测机构,第一视觉检测机构用于检测螺旋桨 的表面划痕、商标印刷缺陷、螺旋桨类型检测,第二视觉检测机构用于检测螺旋桨装配的中 间结果,体感相机用于检测螺旋桨装配的中间动作,该装置包含了三种不同用途的视觉检 测,覆盖了工业应用中机器视觉应用的多种工况,适应于学校进行机器人教学实训;(2)配 备螺旋桨升力检测机构,可以对螺旋桨的关键属性进行检测,对螺旋桨的装配质量进行及 时检测,配备限位杆防止螺旋桨没有安装到位时的误启动;(3)搬运机器人6配备吸取抓手 和夹取抓手,吸取抓手柔性高,夹取抓手放置位置精确,能够及时替补。 附图说明 图1 为本发明装置的俯视结构示意图。 图2 为本发明装置中互动装配平台4的局部结构示意图。 图3 为本发明装置中螺旋桨检测机构的结构示意图。 图4 为本发明装置中螺旋桨检测机构另一视角的结构示意图。 图5 为本发明装置中快换底座的结构示意图。 图6 为本发明装置中上料平台的局部结构示意图一。 图7 为本发明装置中上料平台1的局部结构示意图二。 图8 为本发明装置中搬运机器人6的末端抓手的结构示意图。 图中:1.上料平台;101.矩形框;102.底板;103.定位条;104.挡板;105.定位气缸; 106.定位板;107.连接轴;2.物料传递输送线;3.第一视觉检测机构;4.互动装配平台;401. 体感相机;402.装配指导屏;403.锁轴垫片料仓;404.底座料仓;405.上板料仓;406.螺钉供 料位;407 .第三视觉检测机构;408.人工装配台;5.剔除机构;6.搬运机器人;601 .支柱; 5 CN 111571205 A 说 明 书 3/5 页 602.绕线托盘;603.吸盘;604.连接板;605.竖直气缸;606.手指气缸;607.夹爪;7.螺旋桨 升力检测机构;701.抱紧机构;702.电机;703.限位杆;704.立板;705.基板;706.光轴;707. 轴支座;708.压力传感器;709.快换接座;791.固定底座;792.活动座;793.压盖;710.直行 气缸;711.抱紧爪;712.噪声检测器;713.电机支撑板。











