
技术摘要:
本发明提供了一种用于机器人的机械手的触觉反馈力量控制方法,包括步骤如下:S1、所述机器人机械手将其端部所在位置通过位置传感器和力调整器将数据实时传递给控制器;S2、控制器根据采集到的信号与内部存储信息核对,判断机器人机械手的具体位置,并将控制位置调整器 全部
背景技术:
在工业自动化逐渐发展的今天,为了节约劳动力成本和提高生产效率,机器人的 机械手受到越来越广泛的应用。在机器人的机械手进行操纵时,需要了解作业反力和因障 碍干涉产生的力觉信息。相同控制结构但控制策略不同的遥操纵系统的力反馈效果和操作 性能会有较大差异。针对机器人的机械手的力觉双向伺服控制系统,这些力反馈控制方法 存在如下问题:(1)主-从多自由度系统力反馈效果差;当力与位移强耦合时,操作者不能 较好地把握从动侧干涉和位移情况。(2)对位置-力反馈型控制策略,从动侧与障碍物发生 干涉的自由度为非末端安装检测力传感器的自由度,则操作者无法感知到该干涉力而造成 操纵失败。(3)力反馈控制策略通用性不强,无法满足广泛应用日益多样化的需要。
技术实现要素:
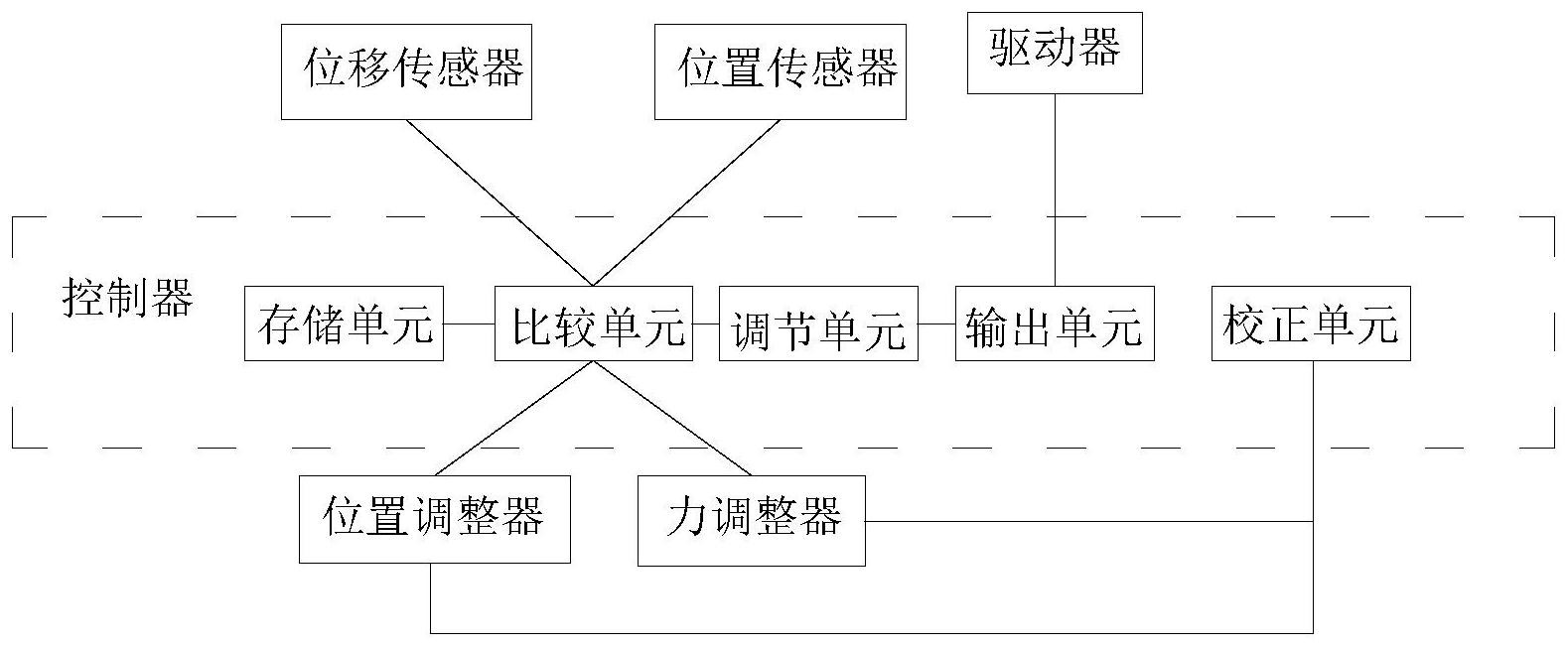
有鉴于此,本发明旨在提出一种用于机器人的机械手的触觉反馈力量控制方法, 以一种控制精度高的用于机器人的机械手的触觉反馈力量控制方法。 为达到上述目的,本发明的技术方案是这样实现的: 一种用于机器人的机械手的触觉反馈力量控制方法,包括机器人的机械手上安装 的控制器、位置调整器、力调整器、驱动器、位置传感器和位移传感器,其具体步骤如下: S1、所述机器人机械手将其端部所在位置通过位置传感器和力调整器将数据实时 传递给控制器; S2、控制器根据采集到的信号与内部存储信息核对,判断机器人机械手的具体位 置,并将控制位置调整器和驱动器动作,直至到达需求位置; S3、当控制器通过实时采集的位置传感器和力调整器的信息,判断机器人机械手 到达反馈位置时,再次与采集到的位移传感器的信息进行二次确认,当二者信息均显示机 器人机械手的位置正确时,判断该位置正确,否则一直重复S2和S3,直至机器人机械手的位 置正确。 进一步的,所述控制器包括依次连接的存储单元、比较单元、调节单元和输出单 元,所述位置传感器信号连接至比较单元。 进一步的,所述控制器还包括校正单元,所述校正单元内存储有标准校准常数,校 正单元信号连接至位置传感器和力调整器。 进一步的,所述步骤S2具体包括:S21、所述比较单元用于将位置传感器所检测的 反馈位置数据与存储数据进行比较;S22、所述调节单元用于根据比较的结果输出调节脉冲 数据至输出单元中,所述输出单元用于控制驱动器根据调节脉冲数据进行动作。 进一步的,在所述步骤S21中所述比较单元还用于将位置传感器所检测的反馈位 3 CN 111571595 A 说 明 书 2/3 页 置数据与第一标准数据进行比较,然后再将两者比较的结果进行求取平均值,再根据该平 均值输出调节脉冲数据。 进一步的,所述驱动器为液压缸。 进一步的,所述控制器为单片机或PLC。 相对于现有技术,本发明所述的用于机器人的机械手的触觉反馈力量控制方法具 有以下优势: (1)本发明所述的用于机器人的机械手的触觉反馈力量控制方法,采用位置传感 器实时检测机械手的位置,通过比较单元和调节单元进行对比和调节,使机械手的控制精 度更高。 (2)本发明所述的用于机器人的机械手的触觉反馈力量控制方法,通用性好,对自 由度数目及运动学特性不同的主—从系统仍然适用。 附图说明 构成本发明的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实 施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中: 图1为本发明创造实施例所述的用于机器人的机械手的触觉反馈力量控制方法的 控制框图。











