
技术摘要:
本申请实施例公开了一种距离检测方法及装置,该方法通过获取车辆的行驶环境图像,确定行驶环境图像的目标中心点以及获取标准行驶环境图像,并确定标准行驶环境图像的标准中心点;根据目标中心点和标准中心点判断行驶环境图像是否发生视角偏移;若行驶环境图像发生视角 全部
背景技术:
在驾驶的过程中,需要通过对车辆附近的物体进行距离检测,确定物体与车辆之 间的实际距离,以便根据实际距离对车辆的行驶状态进行调整。 目前,可以通过车辆拍摄的行驶环境图像的中心点与行驶环境图像中的目标物体 之间的像素点距离,来确定实际的车辆与目标物体之间的实际距离。但是,当车辆在不平坦 的道路上行驶时,会导致获取到的行驶环境图像视角发生偏移,使得行驶环境图像的中心 点与目标物体之间的像素点距离不够准确,导致计算得到的车辆与目标物体之间的实际距 离存在误差。
技术实现要素:
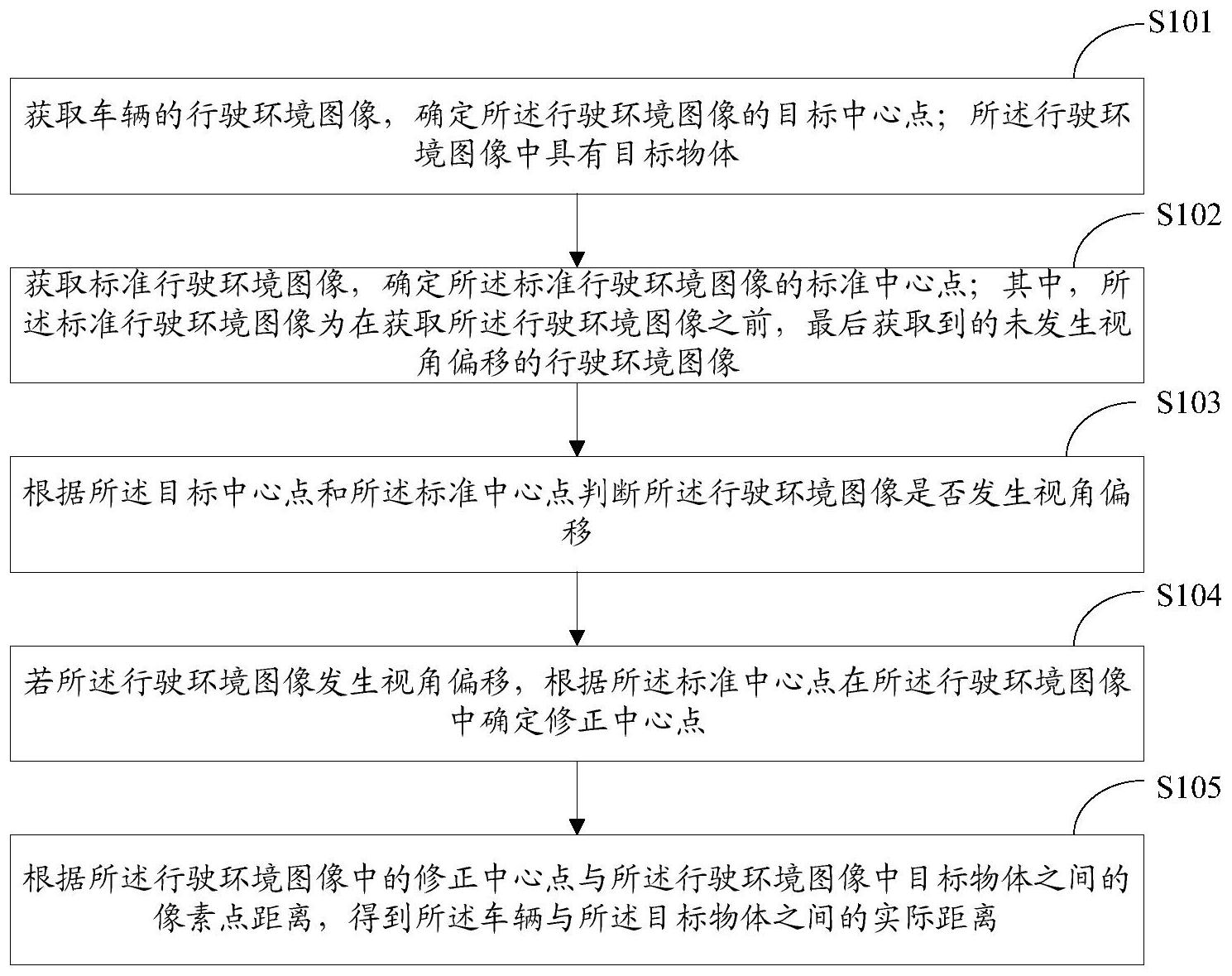
有鉴于此,本申请实施例提供一种距离检测方法及装置,能够较为准确地根据行 驶环境图像得到车辆与目标物体的实际距离。 为解决上述问题,本申请实施例提供的技术方案如下: 第一方面,本申请提供一种距离检测方法,所述方法包括: 获取车辆的行驶环境图像,确定所述行驶环境图像的目标中心点;所述行驶环境 图像中具有目标物体; 获取标准行驶环境图像,确定所述标准行驶环境图像的标准中心点;其中,所述标 准行驶环境图像为在获取所述行驶环境图像之前,最后获取到的未发生视角偏移的行驶环 境图像; 根据所述目标中心点和所述标准中心点判断所述行驶环境图像是否发生视角偏 移; 若所述行驶环境图像发生视角偏移,根据所述标准中心点在所述行驶环境图像中 确定修正中心点; 根据所述行驶环境图像中的修正中心点与所述行驶环境图像中目标物体之间的 像素点距离,得到所述车辆与所述目标物体之间的实际距离。 可选的,所述根据所述目标中心点和所述标准中心点判断所述行驶环境图像是否 发生视角偏移,包括: 获取所述目标中心点距离所述行驶环境图像的底边边界的第一距离; 获取所述标准中心点距离所述标准行驶环境图像的底边边界的第二距离; 获取所述第一距离与所述第二距离之间的距离偏差; 判断所述距离偏差是否大于预设距离阈值,若所述距离偏差大于所述预设距离阈 值,则所述行驶环境图像发生视角偏移。 可选的,所述若所述行驶环境图像发生视角偏移,根据所述标准中心点确定修正 5 CN 111611964 A 说 明 书 2/13 页 中心点,包括: 若所述行驶环境图像发生视角偏移,确定所述行驶环境图像中的目标特征点; 根据所述目标特征点,确定所述标准行驶环境图像的标准特征点,确定所述标准 中心点与所述标准特征点之间的第一相对位置关系; 根据所述第一相对位置关系以及所述行驶环境图像中的目标特征点,确定所述行 驶环境图像中的修正中心点。 可选的,所述根据所述目标中心点和所述标准中心点判断所述行驶环境图像是否 发生视角偏移,包括: 确定所述行驶环境图像中的目标特征点,确定所述目标中心点与所述目标特征点 之间的第二相对位置关系; 根据所述目标特征点,确定所述标准行驶环境图像中的标准特征点; 确定所述标准中心点与所述标准特征点之间的第三相对位置关系; 计算所述第二相对位置关系与所述第三相对位置关系之间的位置偏差; 判断所述位置偏差是否大于预设位置阈值;若大于,则确定所述行驶环境图像发 生视角偏移。 可选的,所述若所述行驶环境图像发生视角偏移,根据所述标准中心点确定修正 中心点,包括: 根据所述第三相对位置关系以及所述行驶环境图像中的目标特征点,确定所述行 驶环境图像中的修正中心点。 可选的,所述确定所述行驶环境图像中的目标特征点,包括: 对所述行驶环境图像进行物体识别,确定行驶环境图像中的静态物体,选取所述 静态物体的标志点作为目标特征点。 可选的,所述确定所述行驶环境图像中的目标特征点,包括: 获取所述行驶环境图像中的物体的标志点; 对所述行驶环境图像进行物体识别,确定所述行驶环境图像中的动态物体,将所 属于所述动态物体的标志点进行删除; 将更新后的标志点作为目标特征点。 可选的,根据所述行驶环境图像中所述修正中心点与所述行驶环境图像中目标物 体之间的像素点距离,得到所述车辆与所述目标物体之间的实际距离,包括: 确定在所述行驶环境图像中所述修正中心点与所述行驶环境图像中目标物体之 间的像素点数量; 根据所述像素点数量以及像素点与实际距离的对应关系,计算得到所述车辆与所 述目标物体之间的实际距离。 第二方面,本申请提供一种距离检测装置,所述装置包括: 行驶环境图像获取单元,用于获取车辆的行驶环境图像,确定所述行驶环境图像 的目标中心点;所述行驶环境图像中具有目标物体; 标准行驶环境图像获取单元,用于获取标准行驶环境图像,确定所述标准行驶环 境图像的标准中心点;其中,所述标准行驶环境图像为在获取所述行驶环境图像之前,最后 获取到的未发生视角偏移的行驶环境图像; 6 CN 111611964 A 说 明 书 3/13 页 视角偏移判断单元,用于根据所述目标中心点和所述标准中心点判断所述行驶环 境图像是否发生视角偏移; 修正中心点确定单元,用于若所述行驶环境图像发生视角偏移,根据所述标准中 心点在所述行驶环境图像中确定修正中心点; 实际距离计算单元,用于根据所述行驶环境图像中的修正中心点与所述行驶环境 图像中目标物体之间的像素点距离,得到所述车辆与所述目标物体之间的实际距离。 第三方面,本申请提供一种用于距离检测的设备。 所述设备包括有存储器,以及一个或者一个以上的程序,其中一个或者一个以上 程序存储于存储器中,且经配置以由一个或者一个以上处理器执行所述一个或者一个以上 程序包含用于进行以下操作的指令: 获取车辆的行驶环境图像,确定所述行驶环境图像的目标中心点;所述行驶环境 图像中具有目标物体; 获取标准行驶环境图像,确定所述标准行驶环境图像的标准中心点;其中,所述标 准行驶环境图像为在获取所述行驶环境图像之前,最后获取到的未发生视角偏移的行驶环 境图像; 根据所述目标中心点和所述标准中心点判断所述行驶环境图像是否发生视角偏 移; 若所述行驶环境图像发生视角偏移,根据所述标准中心点在所述行驶环境图像中 确定修正中心点; 根据所述行驶环境图像中的修正中心点与所述行驶环境图像中目标物体之间的 像素点距离,得到所述车辆与所述目标物体之间的实际距离。 第四方面,本申请提供一种计算机可读介质。 一种计算机可读介质,其上存储有指令,当由一个或多个处理器执行时,使得装置 执行上述一个或多个所述的距离检测方法。 由此可见,本申请实施例具有如下有益效果: 本申请实施例提供的距离检测方法,通过获取车辆的行驶环境图像,确定行驶环 境图像的目标中心点;获取标准行驶环境图像并确定标准行驶环境图像的标准中心点,根 据目标中心点和标准中心点判断行驶环境图像是否发生视角偏移;若行驶环境图像发生视 角偏移,则根据标准中心点在行驶环境图像中确定修正中心点;根据行驶环境图像中的修 正中心点与行驶环境图像中目标物体之间的像素点距离,得到车辆与目标物体之间的实际 距离。由此可见,通过获取标准行驶环境图像的标准中心点,可以确定行驶环境图像是否发 生视角偏移。若行驶环境图像发生视角偏移,则根据标准行驶环境图像的标准中心点,对行 驶环境图像的中心点进行修正,根据得到的修正中心点可以准确地计算车辆与目标物体之 间的实际距离,可以避免由于行驶环境图像的视角偏移所导致的检测到的车辆与目标物体 之间的实际距离不准确的问题。 附图说明 图1为本申请实施例提供的一种距离检测方法的流程图; 图2为本申请实施例提供的一种确定修正中心点的方法的流程图; 7 CN 111611964 A 说 明 书 4/13 页 图3为本申请实施例提供的另一种判断是否发生视角偏移的方法的流程图; 图4为本申请实施例提供的一种距离检测装置的结构示意图。











