
技术摘要:
本申请实施例公开了一种物体边界提取方法及装置,具体地,扫地机利用激光雷达对待清扫区域进行扫描,获得该待清扫区域的扫描结果。根据扫描结果对预先构建的环境栅格地图中的每个栅格进行标注,获得标注后的每个栅格。即,扫地机根据激光雷达的扫描结果对环境栅格地图 全部
背景技术:
随着人工智能技术的不断发展,越来越多的智能家居应运而生,扫地机的出现逐 渐取代了人工清洁,并被越来越多的人所接受。扫地机器人作为一种移动型机器人,可以实 现室内的空间划分、完整清扫以及自动回充等功能,扫地机器人的清扫覆盖率是衡量扫地 机机器人清扫性能的一个重要指标,特别是对于障碍物边界的清扫覆盖率。 目前常用Opencv方法确定障碍物边界,然而利用该方法确定的障碍物边界存在一 定的模糊边界,导致清扫覆盖率较低。
技术实现要素:
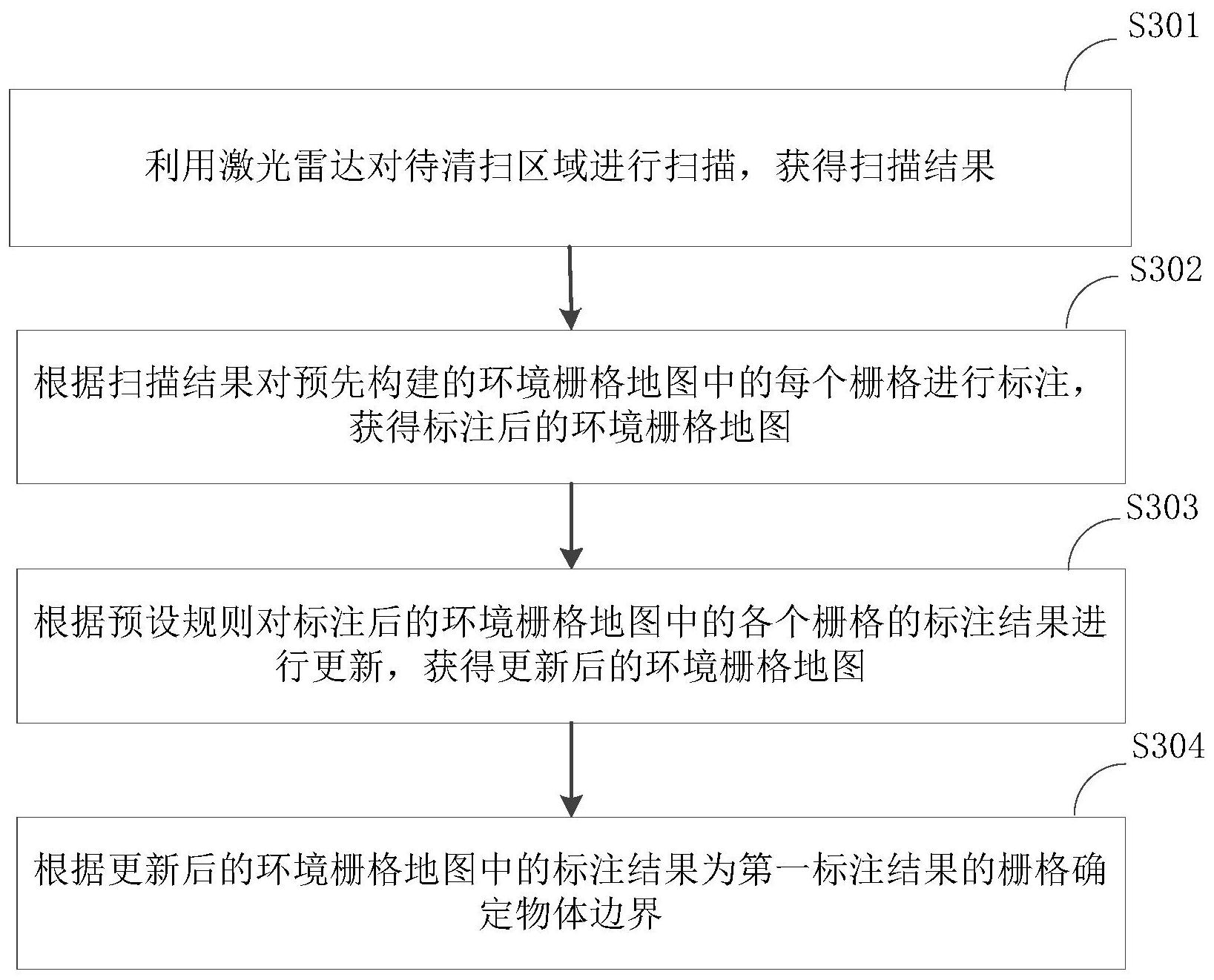
有鉴于此,本申请实施例提供一种物体边界提取方法及装置,以实现更为准确地 提取障碍物的边界线,提高扫地机的清扫覆盖率。 为解决上述问题,本申请实施例提供的技术方案如下: 在本申请实施例第一方面,提供了一种物体边界提取方法,所述方法包括: 利用激光雷达对待清扫区域进行扫描,获得扫描结果; 根据所述扫描结果对预先构建的环境栅格地图中的每个栅格进行标注,获得标注 后的环境栅格地图,所述标注后的环境栅格地图至少包括第一标注结果、第二标注结果、第 三标注结果,所述第一标注结果用于指示所述栅格位于所述待清扫区域中物体的扫描边界 上,所述第二标注结果用于指示所述栅格位于所述激光雷达可视区域,所述第三标注结果 用于指示所述栅格位于所述激光雷达不可视区域; 根据预设规则对所述标注后的环境栅格地图中的各个栅格的标注结果进行更新, 获得更新后的环境栅格地图,所述预设规则用于指示减少所述第一标注结果对应的栅格数 量; 根据所述更新后的环境栅格地图中的标注结果为所述第一标注结果的栅格确定 所述物体边界。 在一种可能的实现方式中,所述根据预设规则对所述标注后的环境栅格地图中的 各个栅格的标注结果进行更新,获得更新后的环境栅格地图,包括: 遍历所述标注后的环境栅格地图,获取与目标栅格相邻的各个栅格对应的标注结 果,所述目标栅格为所述栅格地图中的任一栅格; 根据预设更新规则、所述目标栅格的标注结果以及所述相邻各个栅格对应的标注 结果更新所述目标栅格的标注结果; 当遍历完成后,获取更新后的环境栅格地图。 在一种可能的实现方式中,所述根据预设更新规则、目标栅格的标注结果以及所 述相邻各个栅格对应的标注结果更新所述目标栅格的标注结果,包括: 4 CN 111568312 A 说 明 书 2/9 页 当所述目标栅格的标注结果为所述第一标注结果且所述相邻各个栅格中存在一 栅格的标注结果为所述第二标注结果时,保留所述目标栅格的第一标注结果; 当所述目标栅格的标注结果为所述第一标注结果且所述相邻各个栅格中任一栅 格的标注结果均为非所述第二标注结果时,将所述目标栅格的标注结果更新为所述第三标 注结果。 在一种可能的实现方式中,其特征在于,所述第一标注结果为像素值255、第二标 注结果为像素值0、第三标注结果为像素值128。 在一种可能的实现方式中,其特征在于,所述遍历所述标注后的环境栅格地图包 括按照行遍历所述标注后的环境栅格地图或按照列遍历所述标注后的环境栅格地图;当按 照行遍历所述标注后的环境栅格地图时,所述与目标栅格相邻的栅格为与目标栅格相邻的 左和/或右栅格;当按照列遍历所述标注后的环境栅格地图时,所述与目标栅格相邻的栅格 为与目标栅格相邻的上和/或下栅格。 在一种可能的实现方式中,所述方法还包括: 启动扫地机的激光雷达进行室内扫描,构建环境栅格地图。 在一种可能的实现方式中,所述方法还包括: 根据所述物体边界确定清扫路径,并按照所述清扫路径对所述待清扫区域进行清 扫。 在本申请实施例第三方面,提供了一种物体边界提取装置,所述装置包括: 第一获取单元,用于利用激光雷达对待清扫区域进行扫描,获得扫描结果; 第二获取单元,用于根据所述扫描结果对预先构建的环境栅格地图中的每个栅格 进行标注,获得标注后的环境栅格地图,所述标注后的环境栅格地图至少包括第一标注结 果、第二标注结果、第三标注结果,所述第一标注结果用于指示所述栅格位于所述待清扫区 域中物体的扫描边界上,所述第二标注结果用于指示所述栅格位于所述激光雷达可视区 域,所述第三标注结果用于指示所述栅格位于所述激光雷达不可视区域; 更新单元,用于根据预设规则对所述标注后的环境栅格地图中的各个栅格的标注 结果进行更新,获得更新后的环境栅格地图,所述预设规则用于指示减少所述第一标注结 果对应的栅格数量; 第一确定单元,用于根据所述更新后的环境栅格地图中的标注结果为所述第一标 注结果的栅格确定所述物体边界。 在一种可能的实现方式中,所述更新单元,包括: 第一获取子单元,用于遍历所述标注后的环境栅格地图,获取与目标栅格相邻的 各个栅格对应的标注结果,所述目标栅格为所述栅格地图中的任一栅格; 更新子单元,用于根据预设更新规则、所述目标栅格的标注结果以及所述相邻各 个栅格对应的标注结果更新所述目标栅格的标注结果; 第二获取子单元,用于当遍历完成后,获取更新后的环境栅格地图。 在一种可能的实现方式中,所述更新子单元,具体用于当所述目标栅格的标注结 果为所述第一标注结果且所述相邻各个栅格中存在一栅格的标注结果为所述第二标注结 果时,保留所述目标栅格的第一标注结果;当所述目标栅格的标注结果为所述第一标注结 果且所述相邻各个栅格中任一栅格的标注结果均为非所述第二标注结果时,将所述目标栅 5 CN 111568312 A 说 明 书 3/9 页 格的标注结果更新为所述第三标注结果。 在一种可能的实现方式中,所述第一标注结果为像素值255、第二标注结果为像素 值0、第三标注结果为像素值128。 在一种可能的实现方式中,所述遍历所述标注后的环境栅格地图包括按照行遍历 所述标注后的环境栅格地图或按照列遍历所述标注后的环境栅格地图;当按照行遍历所述 标注后的环境栅格地图时,所述与目标栅格相邻的栅格为与目标栅格相邻的左和/或右栅 格;当按照列遍历所述标注后的环境栅格地图时,所述与目标栅格相邻的栅格为与目标栅 格相邻的上和/或下栅格。 在一种可能的实现方式中,所述装置还包括: 构建单元,用于启动扫地机的激光雷达进行室内扫描,构建环境栅格地图。 在一种可能的实现方式中,所述装置还包括: 第二确定单元,用于根据所述物体边界确定清扫路径; 清扫单元,用于按照所述清扫路径对所述待清扫区域进行清扫。 在本申请实施例第三方面,提供了一种计算机可读存储介质,所述计算机可读存 储介质中存储有指令,当所述指令在终端设备上运行时,使得所述终端设备执行如第一方 面所述的物体边界提取方法。 在本申请实施例第四方面,提供了一种扫地机,包括:存储器,处理器,及存储在所 述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时, 实现第一方面所述的物体边界提取方法。 由此可见,本申请实施例具有如下有益效果: 本申请实施例扫地机首先利用激光雷达对待清扫区域进行扫描,获得该待清扫区 域的扫描结果。扫地机在根据扫描结果对预先构建的环境栅格地图中的每个栅格进行标 注,以获得标注后的每个栅格。即,扫地机首先根据激光雷达的扫描结果对环境栅格地图进 行初次标注,以描绘出待清扫区域中物体的轮廓。其中,标注后的环境栅格地图至少包括三 种标注结果,分别为第一标注结果、第二标注结果和第三标注结果。其中,第一标注结果表 示该栅格位于物体的扫描边界(物体轮廓)上,第二标注结果表示该栅格位于激光雷达的可 视区域,表明扫地机可以直接清扫,第三标注结果表示该栅格位于激光雷达的不可视区域, 表明扫地机可能不能进行清扫。然后,扫地机根据预设规则对标注后的环境栅格地图中的 各个栅格进行重新标注,获得更新后的环境栅格地图。扫地机根据更新后的环境栅格地图 中的标注结果为第一标注结果的栅格确定物体边界,从而获得更为精准的物体边界。其中, 预设规则用于减少环境栅格地图中第一标注结果对应的栅格。即,通过本申请实施例提供 的方法,将对初次描绘的环境栅格地图中的各个栅格标注结果进行更新,使得更新后的环 境栅格地图更能准确反应物体边界,提高扫地机的清扫覆盖率。 附图说明 图1为本申请实施例提供的一种扫地机结构示意图; 图2a为传统的确定物体边界示意图; 图2b为本申请实施例提供的确定物体边界示意图; 图3为本申请实施例提供的一种物体边界提取方法流程图; 6 CN 111568312 A 说 明 书 4/9 页 图4a为本申请实施例提供的根据扫描结果标注的环境栅格地图示意图; 图4b为本申请实施例提供的更新后的环境栅格地图示意图; 图5为本申请实施例提供的一种物体边界提取装置结构图。











