
技术摘要:
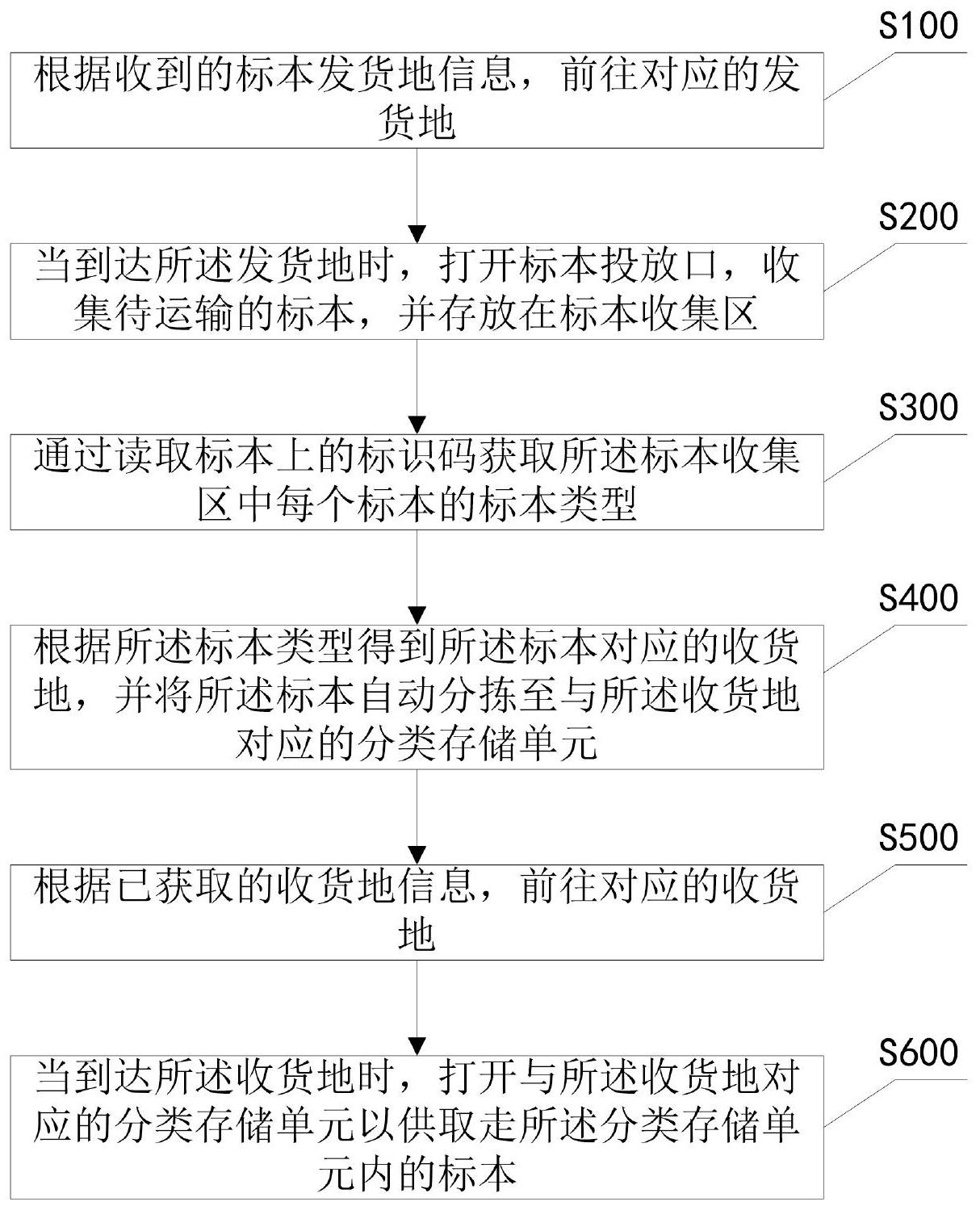
本发明提供了一种基于机器人的标本运输方法及机器人,包括:根据收到的标本发货地信息,前往对应的发货地;当到达所述发货地时,打开标本投放口,收集待运输的标本,并存放在标本收集区;通过读取标本上的标识码获取所述标本收集区中每个标本的标本类型;当到达所述收 全部
背景技术:
检验标本是医院的主要运输物资之一,并且由于标本检查具有较强的时效性,标 本产生后要尽快开始做检查,因此对运输流程和速度都有较高的要求。标本在医院的多个 不同地点如住院病区、门急诊抽血处等产生,根据检测项目的不同,要运送到不同的目的 地,比如生化检测、微生物检测等检查科室。目前标本运输有几类方式:人工运输,气动物 流,轨道物流,物流机器人等。 以上几种物流方式均只能做到把不同地点的标本运输到一处,再经过人工分拣与 分类,然后二次运输到不同的检验目的地。 此外,还存在以下问题: 整个标本运输流程被拆分为多个串行独立动作,对标本运输时效性产生不利影 响。流程中间,需要人工协助,人工作业存在动作不标准,差错率高,难管理,人因失误多等 问题。
技术实现要素:
本发明的目的之一是为了克服现有技术中存在的部分不足,提供一种基于机器人 的标本运输方法及机器人。 本发明提供的技术方案如下: 一种基于机器人的标本运输方法,包括:根据收到的标本发货地信息,前往对应的 发货地;当到达所述发货地时,打开标本投放口,收集待运输的标本,并存放在标本收集区; 通过读取标本上的标识码获取所述标本收集区中每个标本的标本类型;根据所述标本类型 得到所述标本对应的收货地,并将所述标本自动分拣至与所述收货地对应的分类存储单 元;根据已获取的收货地信息,前往对应的收货地;当到达所述收货地时,打开与所述收货 地对应的分类存储单元以供取走所述分类存储单元内的标本。 进一步地,所述的当到达所述发货地时,打开标本投放口,包括:当到达所述发货 地,且验证通过标本投放人员的权限时,自动打开标本投放口以供投入待运输的标本。 进一步地,所述的通过读取标本上的标识码获取所述标本收集区中每个标本的标 本类型包括:将所述标本收集区的标本逐个通过读码器,通过读取所述标本上的标识码,获 取所述标本的化验项目信息;根据所述标本的化验项目信息,获取所述标本的标本类型。 进一步地,所述的根据所述标本类型得到所述标本对应的收货地,并将所述标本 自动分拣至与所述收货地对应的分类存储单元包括:根据所述标本的标本类型确定所述标 本的收货地及与所述收货地对应的分类存储单元;控制所述标本掉落到相应的通道口,并 沿着所述通道口滑落至对应的分类存储单元。 4 CN 111606062 A 说 明 书 2/9 页 进一步地,所述的当所述目标地为收货地时,打开与所述收货地对应的分类存储 单元,包括:当到达所述收货地,且验证通过标本取出人员的权限时,打开与所述收货地对 应的分类存储单元。 本发明还提供一种机器人,包括:标本收集模块,用于根据收到的标本发货地信 息,前往对应的发货地;以及,当到达所述发货地时,打开标本投放口,收集待运输的标本, 并存放在标本收集区;标本分拣模块,用于通过读取标本上的标识码获取所述标本收集区 中每个标本的标本类型;以及,根据所述标本类型得到所述标本对应的收货地,并将所述标 本自动分拣至与所述收货地对应的分类存储单元;标本运输模块,用于根据已获取的收货 地信息,前往对应的收货地;以及,当到达所述收货地时,打开与所述收货地对应的分类存 储单元以供取走所述分类存储单元内的标本。 进一步地,还包括:权限识别模块,用于识别标本投放人员的权限;所述标本收集 模块,进一步用于当到达所述发货地,且验证通过标本投放人员的权限时,自动打开标本投 放口以供投入待运输的标本。 进一步地,还包括:读码器,用于读取标本上的标识码,获取所述标本的化验项目 信息;所述标本分拣模块包括:标本类型获取单元,用于当所述标本收集区的标本逐个通过 所述读码器,根据所述读码器输出的所述标本的化验项目信息,获取所述标本的标本类型。 进一步地,所述标本分拣模块还包括:分配单元,用于根据所述标本的标本类型确 定所述标本的收货地及与所述收货地对应的分类存储单元;所述标本分拣模块,进一步用 于控制所述标本掉落到相应的通道口,并沿着所述通道口滑落至对应的分类存储单元。 进一步地,所述权限识别模块,进一步用于识别标本取出人员的权限;所述标本收 集模块,进一步用于当到达所述收货地,且验证通过标本取出人员的权限时,打开与所述收 货地对应的分类存储单元。 通过本发明提供的一种基于机器人的标本运输方法及机器人,至少能够带来以下 有益效果: 1、本发明通过基于机器人的自动收集标本、自动分拣标本、自动分类运输标本,完 成了一个全流程的标本自动运输过程,去掉了人工参与的中间环节,将人工参与的工作降 到最低,节约了人工成本,避免了人工失误;同时自动分拣与收集、运输过程并行进行,提高 了整体运输效率。 2、本发明通过在机器人上增设权限识别模块,只允许有权限人员进行标本投放和 标本取出,提高了整个运输过程的安全性。 附图说明 下面将以明确易懂的方式,结合附图说明优选实施方式,对一种基于机器人的标 本运输方法及机器人的上述特性、技术特征、优点及其实现方式予以进一步说明。 图1是本发明的一种基于机器人的标本运输方法的一个实施例的流程图; 图2是本发明的一种基于机器人的标本运输方法的另一个实施例的流程图; 图3是本发明的一种机器人的一个实施例的结构示意图; 图4是本发明的一种机器人的另一个实施例的结构示意图。 附图标号说明: 5 CN 111606062 A 说 明 书 3/9 页 100.标本收集模块,200.标本分拣模块,300.标本运输模块,210.标本类型获取单 元,220.分配单元,400.权限识别模块,500.读码器。











