
技术摘要:
本发明涉及一种TDICCD空间相机行周期实时匹配方法及星载装置,其中星载装置包括:面阵成像器件,用于对景物目标连续成像;数据处理芯片,用于控制面阵成像器件成像和存储芯片,以及获取面阵成像器件成像得到的相邻的两帧具有重叠成像区域的图像,根据两帧图像计算行周 全部
背景技术:
时间延时积分型电荷耦合器件(Time Delayed and Integration Charge Coupled Device,TDICCD)是一种面阵结构、线阵输出的新型CCD,它通过对同一物体多次曝 光,利用多级积分来增加积分时间从而增加光能量。与一般线阵CCD相比,其响应度更高,动 态范围更宽,在光线较暗的场所也能输出一定信噪比的信号,可极大地改善恶劣环境条件 引起信噪比低的不利因素。因此,TDICCD在空间探测航天遥感领域有着广泛应用。 TDICCD工作时必须保证像移速率与电荷转移速率的匹配,同时像移方向必须沿着 TDI方向,否则会造成相机在TDI方向上和垂直TDI方向上像质的退化。TDICCD多级累积积分 的特性,使其必须在较长的累积积分时间内保证像移速度与转移速度的匹配,才能获得清 晰的图像。然而,目前的TDICCD空间相机由于受各种工程误差的影响,例如星体陀螺及飞轮 等的高频振动在星体结构上的传递、太阳能帆板的低频振动传递等,都不能保证像移速度 与电荷转移速度的完全匹配,从而降低了成像质量。
技术实现要素:
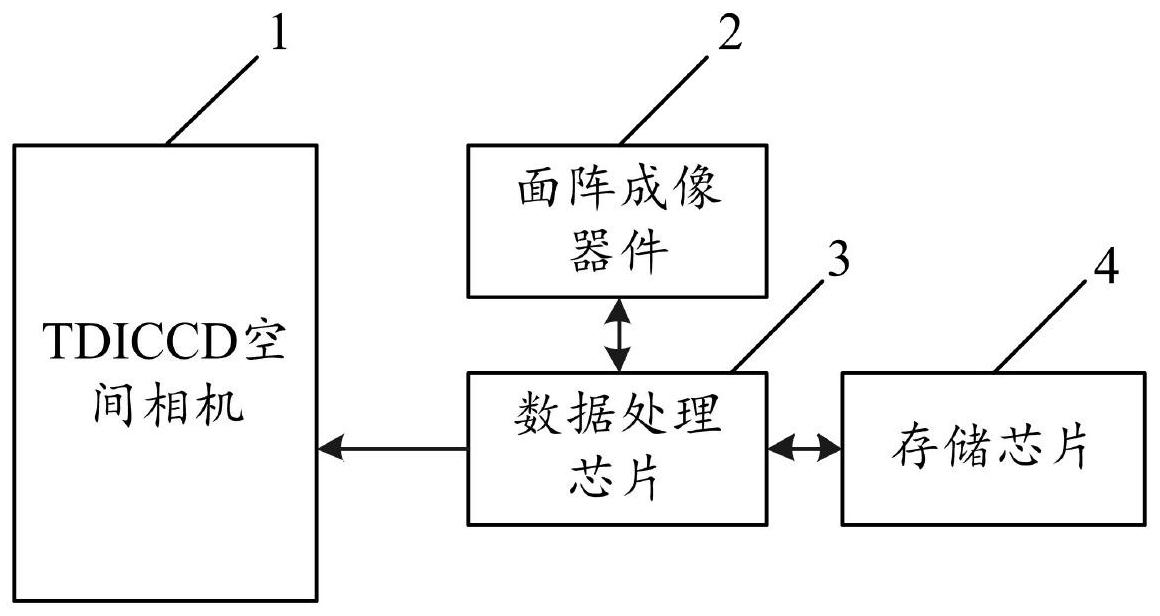
基于此,有必要针对现有技术中TDICCD空间相机成像存在的问题,提供一种 TDICCD空间相机行周期实时匹配方法及星载装置。本发明所提出的一种TDICCD空间相机行 周期实时匹配方法及星载装置是一种采用面阵成像器件计算像移速度并对TDICCD空间相 机行周期进行实时匹配的方法及星载装置,使空间相机能够选择合适的行周期保证像移速 率与电荷转移速率匹配,达到提升成像质量的目的。 为解决上述问题,本发明采取以下技术方案: 一种TDICCD空间相机行周期实时匹配星载装置,包括: 与TDICCD空间相机处于同一焦平面上的面阵成像器件,用于对景物目标连续成 像; 分别与所述面阵成像器件和存储芯片连接的数据处理芯片,用于控制所述面阵成 像器件和所述存储芯片,以及获取所述面阵成像器件成像得到的相邻的两帧图像,且相邻 的两帧图像具有重叠成像区域,根据两帧图像计算行周期,并将所述行周期传输至所述 TDICCD空间相机,所述TDICCD空间相机根据所述行周期成像; 所述存储芯片,用于存储数据,与所述数据处理芯片实现数据交互功能。 本发明还提出一种TDICCD空间相机行周期实时匹配方法,包括以下步骤: 实时获取面阵成像器件对景物目标连续成像得到的相邻的两帧图像,且相邻的两 帧图像具有重叠成像区域; 利用图像对比算法计算两帧图像之间在沿卫星飞行方向上的相对偏移量; 4 CN 111601055 A 说 明 书 2/6 页 根据所述相对偏移量和所述面阵成像器件的帧频计算像移速度; 根据所述像移速度计算行周期,并将所述行周期传输至TDICCD空间相机,所述 TDICCD空间相机根据所述行周期成像。 与现有技术相比,本发明具有以下有益效果: 本发明通过选择合适的工作参数,如开窗大小、曝光时间等,使面阵成像器件的相 邻的两帧图像具有重叠成像区域,根据该重叠成像区域结合面阵成像器件的帧频以及 TDICCD芯片的像元尺寸可以计算出行周期,进而为TDICCD空间相机匹配合适的行周期,使 TDICCD空间相机能够选择合适的行周期保证像移速度与电荷转移速度匹配,达到提升成像 质量的目的。 附图说明 图1为本发明其中一个实施例中TDICCD空间相机行周期实时匹配星载装置的结构 示意图; 图2为面阵成像器件对地重叠成像示意图; 图3为利用灰度投影算法计算图像间的相对偏移量的示意图。











