
技术摘要:
本发明公开了一种点云误差方法,对实测点云和理论网格曲面进行以下处理:利用最近邻搜索方法,查找顶点V的邻近点集;计算顶点V与所述第一图形面片质心之间的欧式距离;以顶点V为圆柱几何中心,构建圆柱搜索空间;遍历邻近点集中的各点,从邻近点集中筛选出各个参考点, 全部
背景技术:
随着现代化制造业的不断发展,逆向工程技术得到了广泛的研究和应用;其中,三 维扫描建模是一种常见的逆向技术,其采用三维扫描测量设备对场景中的实体进行测量, 得到离散的点云数据;由于测量设备本身的精度误差,以及不可避免的电磁干扰,点云数据 存在误差(噪声);为了计算误差、评估点云数据,往往需要利用被测实体的CAD数模作为参 考,进行误差计算;数模通常以网格曲面的形式作为表达,其包括图形面片、顶点及顶点序 列;为此,现有方法计算点云误差的方法为:计算实测点云中各个点到其最邻近图形面片之 间的有向距离,计算时,首先以所有图形面片作为候选对象逐一进行计算,经排序后得到最 邻近图形面片;这种计算方法,存在耗时长,效率低的问题。
技术实现要素:
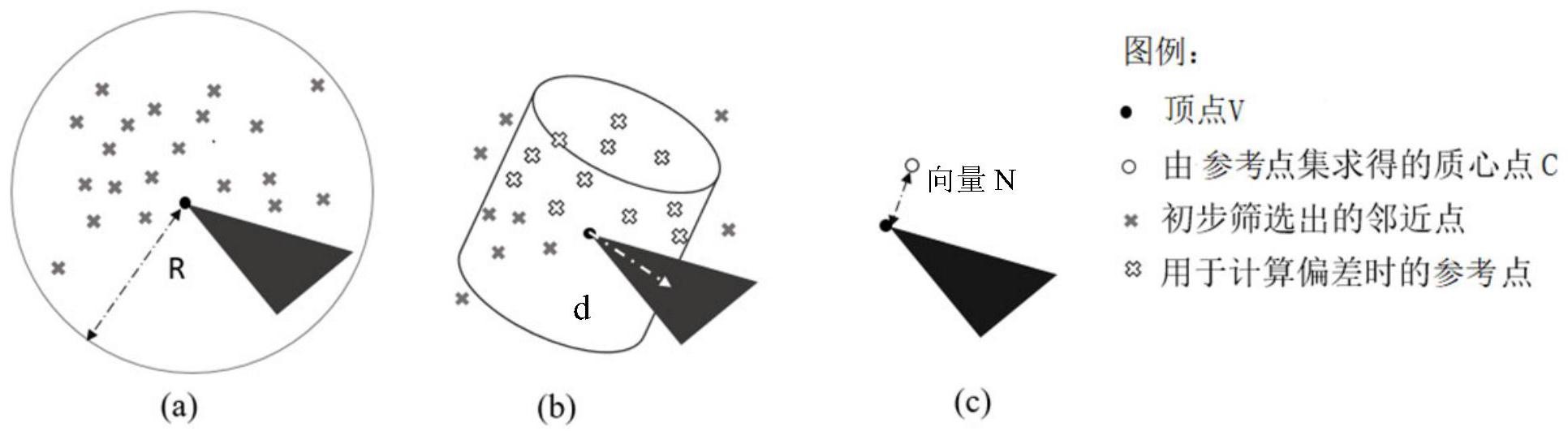
针对上述问题,本发明提出一种点云误差方法,可量化实测点云与待测物理论网 格曲面之间的误差,能够用于评估实测点云数据的质量。 本发明技术方案如下: 一种点云误差计算方法,记待测物数模的网格曲面为理论网格曲面,获取所述理 论网格曲面中任一图形面片的法向量、记任一图形面片的单个顶点为顶点V; 获取所述待测物表面的三维点云,将其记为实测点云;建立所述实测点云数据的 拓扑关系;记实测点云中的单个点为点S; 所述理论网格曲面与实测点云处于同一个空间坐标系; 对实测点云和理论网格曲面进行以下处理: 1)利用最近邻搜索方法,查找与顶点V相近邻的K个点S,将查找到的各点S记为顶 点V的邻近点集; 遍历所述理论网格曲面中的所有顶点V,得到各个顶点V对应的邻近点集; 2)将单个顶点V所在的任一个图形面片记为第一图形面片; I、计算顶点V与所述第一图形面片质心之间的欧式距离d;预先设置点云误差容许 值D、角度误差容许值β; 以顶点V为圆柱几何中心,d为圆柱半径、y×D为圆柱高度、顶点V和第一图形面片 法向量P建立的圆柱轴线l,构建圆柱搜索空间;系数y取值1.5~3; 计算邻近点集中的单个点J与圆柱轴线l之间的距离d1、与第一图形面片所在平面 的距离d2;点J的法向量Q与圆柱轴线l的夹角α; 若d1<d,d2<D,且α<β,则将点J记为参考点; 遍历邻近点集中的各点,从邻近点集中筛选出各个参考点,并其存储为参考点集; II、求取参考点集的质心C,将其与顶点V之间的有向距离L记为点云误差; 4 CN 111599016 A 说 明 书 2/4 页 3)采用与步骤2)相同的方法,遍历所述理论网格曲面中的各个顶点V,得到各顶点 V对应的参考点集与理论网格曲面之间的点云误差;进而获得实测点云的误差分布。 进一步,若单个顶点V同时属于多个图形面片,为了获得更为丰富的点云误差,在 步骤2)中,将当前顶点V所在的多个图形面片分别记为第一图形面片,每次更新第一图形面 片,均进行步骤I、II。 进一步,步骤1)中,利用最近邻搜索方法查找与顶点V相近邻的K个点S的方法是: 设置搜索半径R,R≥D,以当前遍历的顶点V为中心,建立球状搜索空间,将该空间 内的的各个点S记为邻近点集。 优选, 进一步,若当前顶点V在球状搜索空间内未搜索到邻近点,或参考点集中无点,则 认为实测点云在顶点V处的偏差为无穷大。 进一步,所述理论网格曲面通过对待测物数模进行网格化处理获得;所述图形面 片为三角形面片或矩形面片。 进一步,步骤II中,所述有向距离L的方向符号与向量N与法向量P点乘结果相同, 所述向量N为顶点V指向质心C构成的向量。 优选,步骤I中,D=0.5~8mm,β=30°~60°。 进一步,建立实测点云数据的拓扑关系的方法包括:八叉树方法和K-D tree方法。 进一步,步骤I中,获取当前遍历点的法向量Q的方法为:利用kd树当前遍历点周围 的10-40个点记为近邻点,根据最小二乘法将近邻点坐标拟合出第一平面,所述第一平面法 向量记为当前遍历点的法向量初始值,利用加权平均对法向量初始值进行修正,得到最终 的法向量。 本方法以理论网格曲面中的各顶点为遍历对象,通过筛选过程,准确的得到与其 邻近的各点S,将实测点云划分成各个参考点集,计算时,只需计算参考点集中的质心与顶 点之间的有向距离,即可得出该区域的点云误差;具有计算快速、数据有效的优点,实验得 出,采用本方法处理1亿实测点云数据,采用三角网格曲面,包含390万顶点,761万三角面 片,总耗时仅需14秒,可适用于实时解算,而采用传统方法时间往往需要耗时5分钟以上,不 适合在线评估。 附图说明 图1为实施例车身三角形网格模型及侧面实测点云分布示意图; 图2为实施例在单个三角形面片顶点V附近筛选邻近点、参考点的示意图; 图3为实施例中图形面片顶点与实测点云之间的误差分布图。











