
技术摘要:
本发明涉及一种基于V2X技术的车辆同车道位置判断方法,包括:通过V2X获取前车和后车在一定时间段内或一定行驶距离内的历史行车轨迹;对获取的前车和后车的历史行车轨迹进行处理,并分别对处理后的前车和后车的历史行车轨迹进行曲线拟合,得到前车拟合曲线和后车拟合曲 全部
背景技术:
目前,基于V2X技术的,判断远车(RV)是否是本车道的主流方法是,计算远车(RV) 到主车(HV)的行驶方向所在直线的垂直距离,根据距离的大小判断远车(RV)相对于主车 (HV)的哪个车道。由于驾驶员在驾驶过程中会小幅度左右转动方向盘,导致车辆航向角存 在在固定值上下浮动的情况。从而出现属于本车道的车辆会被误判为相邻车道的车辆,或 相邻车道的车辆被误判为本车道的车辆。 传统判断远车(RV)相对于主车(HV)的位置算法是:计算远车(RV)到主车(HV)的行 驶方向所在直线的垂直距离(dis),根据距离的大小判断远车(RV)属于哪个车道,如图1所 示。在主车(HV)沿非直线行驶的过程中,按照传统算法计算主车(HV)与远车(RV)两车之间 的距离垂直距离(dis),根据垂直距离(dis)的值判断远车(RV)与主车(HV)应该处于同一车 道,但,很明显,主车(HV)与远车(RV)处于相邻车道。
技术实现要素:
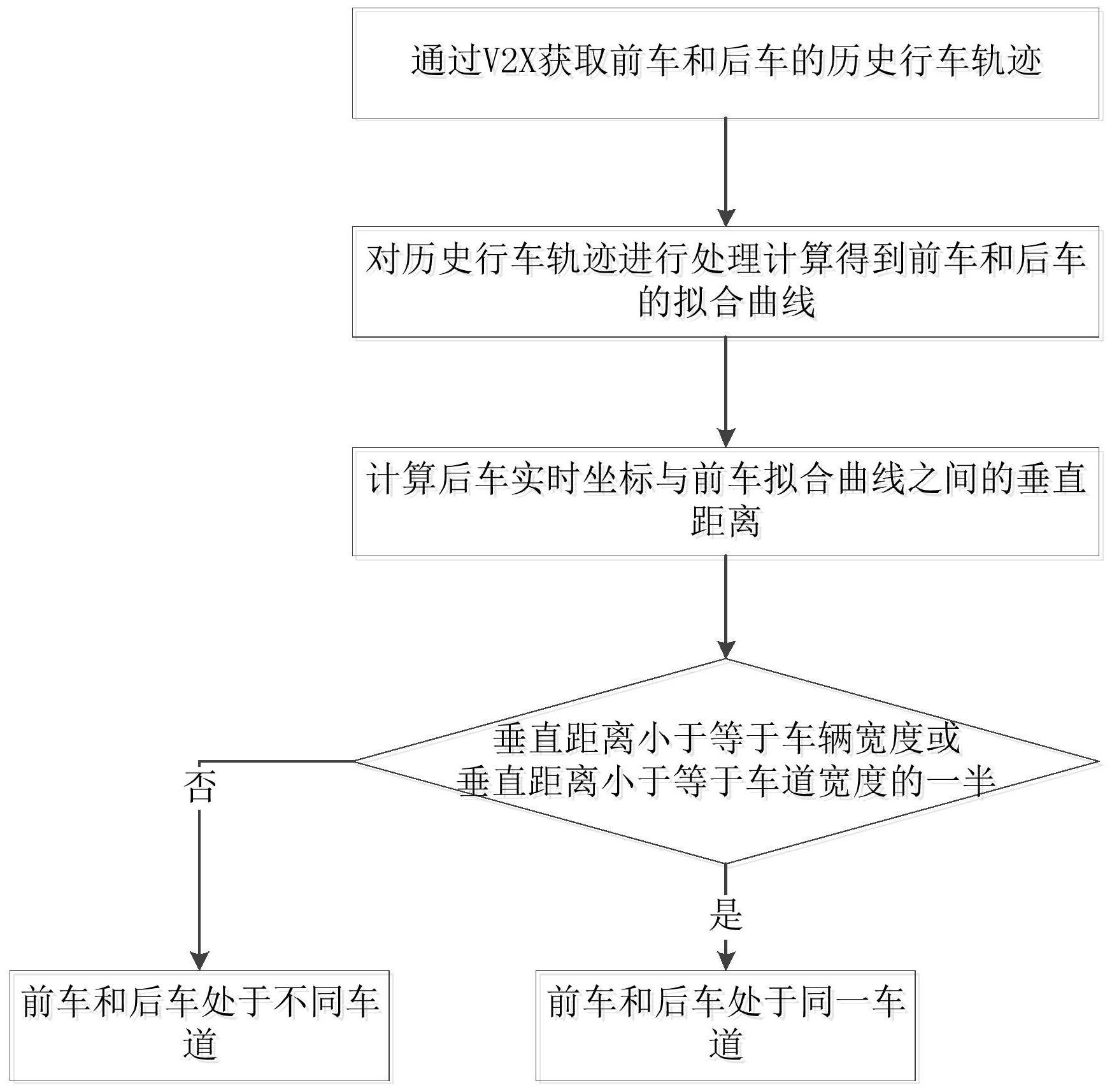
本发明为克服上述现有技术所述的不足,提供一种基于V2X技术的车辆同车道位 置判断方法。 为解决上述技术问题,本发明的技术方案如下: 一种基于V2X技术的车辆同车道位置判断方法,包括如下步骤: 通过V2X获取前车和后车在一定时间段内或一定行驶距离内的历史行车轨迹; 对获取的前车和后车的历史行车轨迹进行处理,并分别对处理后的前车和后车的 历史行车轨迹进行曲线拟合,得到前车拟合曲线和后车拟合曲线; 计算后车实时坐标与前车拟合曲线之间的垂直距离; 根据垂直距离、车辆宽度和车道宽度判断前车和后车是否处于同一车道。 进一步的,作为优选技术方案,计算垂直距离具体包括: 获取后车当前行驶信息,提取距离后车拟合曲线最近的坐标点; 过所述坐标点获取后车拟合曲线的切线; 过所述坐标点获取所述切线的垂线; 提取所述切线与所述前车拟合曲线的交点; 计算所述坐标点与所述交点之间的距离即为所述垂直距离。 进一步的,作为优选技术方案,对获取的前车和后车的历史行车轨迹进行处理具 体包括: 以后车起始点为坐标原点建立坐标系,对前车和后车的历史行车轨迹进行坐标转 换,得到前车和后车的历史局部坐标点。 3 CN 111591296 A 说 明 书 2/4 页 进一步的,作为优选技术方案,计算前车拟合曲线和后车拟合曲线具体包括: 分别对前车和后车的历史局部坐标点进行最小二乘三次曲线拟合,分别得到前车 拟合曲线和后车拟合曲线。 进一步的,作为优选技术方案,得到的前车拟合曲线和后车拟合曲线分别为: L1:y=k0 k1*x k2*x2 k3*x3 L2:y’=k0 k1*x’ k2*x’2 k3*x’3 其中,L1表示前车拟合曲线,L2表示后车拟合曲线。 进一步的,作为优选技术方案,所述历史行车轨迹包括车辆位置坐标,取车辆当前 时刻后轴中心点所在的坐标为车辆位置坐标。 进一步的,作为优选技术方案,判断前车和后车是否处于同一车道具体包括: 当后车实时坐标与前车拟合曲线之间的垂直距离小于等于预设的车辆宽度或者 后车实时坐标与前车拟合曲线之间的垂直距离小于等于车道宽度的一半时,则判断前车和 后车处于同一车道,否则,判断前车和后车处于不同车道。 与现有技术相比,本发明技术方案的有益效果是: 本发明通过V2X技术接收并保存车辆位姿信息,并根据存储的车辆位姿信息计算 前车和后车之间的垂直距离,以判断前车和后车是否处于同一车道,提高了两车相对位置 判断的正确率,利于驾驶员做出及时的规避动作。 附图说明 图1为本发明传统两车位置计算示意图; 图2为本发明方法步骤流程图。 图3为本发明直道两车位置计算示意图。 图4为本发明直道两车位置计算示意图。 图5为本发明弯道两车位置计算示意图。 图6为本发明弯道两车位置计算示意图。 附图仅用于示例性说明,不能理解为对本专利的限制;为了更好说明本实施例,附 图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;对于本领域技术人员来说, 附图中某些公知结构及其说明可能省略是可以理解的;相同或相似的标号对应相同或相似 的部件;附图中描述位置关系的用语仅用于示例性说明,不能理解为对本专利的限制。











