
技术摘要:
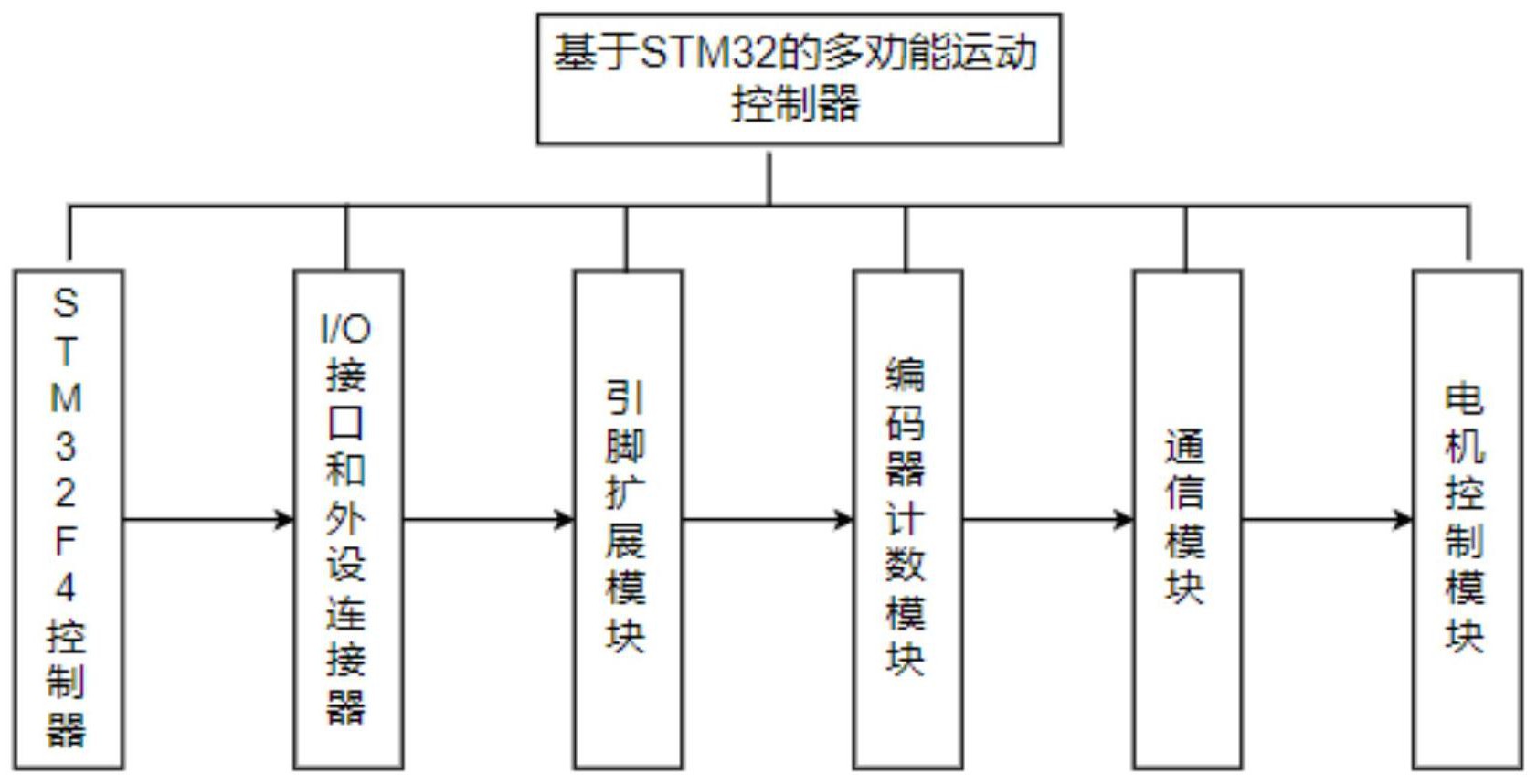
本发明一种基于STM32F4的多功能运动控制方法,包括STM32F4控制器、I/O接口和外设连接模块、引脚扩展模块、编码器计数模块、通信模块、电机控制模块;STM32F4控制器分别与I/O接口和外设连接模块和引脚扩展模块、编码器计数模块、通信模块、电机控制模块连接;本发明实现 全部
背景技术:
运动控制器就是控制电动机的运行方式的专用控制器:比如电动机在由行程开关 控制交流接触器而实现电动机拖动物体向上运行达到指定位置后又向下运行,或者用时间 继电器控制电动机正反转或转一会停一会再转一会再停。运动控制在机器人和数控机床的 领域内的应用要比在专用机器中的应用更复杂,因为后者运动形式更简单,通常被称为通 用运动控制(GMC)。 现阶段运动控制大多是用PLC 驱动器,PLC的英文全称是:Programmable logic Controller,可编程逻辑控制器,一种数字运算操作的电子系统,专为在工业环境应用而设 计的。它采用一类可编程的存储器,用于其内部存储程序,执行逻辑运算,顺序控制,定时, 计数与算术操作等面向用户的指令,并通过数字或模拟式输入/ 输出控制各种类型的机械 或生产过程。是工业控制的核心部分。PLC 控制器主要是指数字运算操作电子系统的可编 程逻辑控制器,用于控制机械的生产过程。此模式的缺点是占用空间大,成本比较高,不利 于低成本或者空间有限的夹治具的使用。因此我们开发一款多功能支持多种编程语言的控 制器。
技术实现要素:
发明目的: 本发明为了能够实现成本模块较低,集成度高,而提出了一种基于STM32F4的多功 能运动控制方法。 本发明所采用的技术方案: 本发明提出了一种基于STM32F4的多功能运动控制方法,包括S TM32F4芯片、I/O 接口和外设连接模块、引脚扩展模块、编码器计数模块、通信模块、电机控制模块;STM32F4 芯片与外设连接以太网A PI接口实现网络连接通讯,通过JTAC接口连接ST仿真器模拟;为 了实现异步传输和减少数据延迟,同样STM32F4芯片的CAN和UART 与外设的API接口相连, 实现上位机与芯片之间的通讯传输;多任务并行具体为:正交AB信号,串通通信协议命令解 析任务,驱动电机发送脉冲任务以及限位保护任务;通过OS-II模式进行抢占式内核,按任 务优先级的高低对任务进行调高传输,而任务的优先级的设置主要按照整个系统运行的时 序来确定;通过自行排好优先级后,对于系统运行时,各任务的优先级固定不变;STM32F4芯 片在任务中完成对事件的处理,而各个任务通过外部中断来实现发送。 更进一步,与外设通过PWM脉冲实现电压电流的输入与输出,从而控制制动器以及 电阻的阻值释放;通过双脉冲通道进行输入输出,双脉冲通过CW输入一个脉冲,则电机朝CW 方向旋转一个指令单位或一个步级;CCW输入一个脉冲,则电机朝CCW方向旋转一个指令单 4 CN 111580470 A 说 明 书 2/5 页 位或一个步级;从而达到控制器的启停。 更进一步,负载传输的均衡性,因而采用PMSM接收控制信号,以及将控制请求通过 电压电流释放级IGBT芯片,实现AD数字转换及电压脉冲。采用的PMSM控制脉冲的频率,升速 时,使脉冲频率增高,减速时相反。缩短速度转换时间,在PMSM技术上使用建立数据方法,结 合加减速曲线各段的频率建立一个连续的数据表,并通过转换程序将其转换为定时的周期 的初值,从而保证不占用中断时间的前提下保证电机的高速运行。 更进一步,其中特别是较大负载的系统必须具有合理的加减速控制器,那是因为 运行控制器中的步进电机的加减速控制器与自身的启动频率和运行频率有关,所以为了保 证负载均衡,避免“超车”风险,必须加采用一个加减速控制器,实现运动控制器与负载的均 衡控制. 更进一步,集成分压电阻,通过控制电流,在电压达到最大极限值时可以有效的规 避击穿的风险。 更进一步,还包括V/W的电流测量器,实时的将负载发出来的电流电压进行监测, 然后判定是否可以进行启动以及数据的转换,从而达到双保险的效果。总结就是该控制器 在控制方面注重对电流电压的控制,只有稳定了电流电压,在运行过程中才不会出现突然 断停的情况,保证了运动控制器可以长时间的稳定工作。 更进一步,通过I2C总线双向输出信息,将外界的驱动信号传输到芯片,通过ADC接 收转换编码,再STM32F4芯片处理,将信号输送的仿真机。此过程主要采用一个应答的通信 方式,将接受的报文分为上行和下行报文格式,所有报文除了起始和结束字符外一律采用 ASCII字符,在应答后,对于任何命令在被成功接收后都将返回一个应答报文,从而实现不 丢包(不漏传数据)的风险,保证了每个通讯信号都能完整的监听。 更进一步,采用zynq 7000系为平台的控制板卡。 更进一步,通过上电,然后检测是否需要bootloader升级,如果需要升级则执行 USB或连网的方式进行应用升级;之后判断是识别 PLC梯形指令还是C代码,如为PLC梯形指 令,就需要判断是否支持 PLC梯形指令解析,如果不支持则会状态指示灯报错,支持的话则 执行PLC应用程序;如果判断能识别C代码,则会执行C应用程序。 本发明所产生的技术效果: 本发明实现产品标准化,减少开发时间,降低设备及治具开发成本。 附图说明 图1为本发明的核心板模块架构图。 图2为本发明的核心控制器STM32F4的框架图。 图3为本发明核心2路直流电机状态表。 图4为本发明多功能控制器的控制原理图。 图5为本发明在zynq 7000平台上的实例。 图6为本发明实现的逻辑时序图











