
技术摘要:
本发明提供了一种制动控制方法、装置及控制器,该制动控制方法,应用于包括电助力制动系统的分布式驱动汽车,方法包括:获取需求制动力、前轴电制动回收能力和后轴电制动回收能力;根据需求制动力、前轴电制动回收能力、后轴电制动回收能力,以及预设前轴‑后轴制动力 全部
背景技术:
按照动力系统布局形式的不同,电动汽车可以分为集中式驱动和分布式驱动两种 驱动形式。集中式驱动的动力需要经过变速器、传动轴、差速器、半轴等部件最终作用于车 轮,其最大程度地保留了电动汽车与传统燃油车的兼容度,故目前国内外各大主机厂推出 的车型都采用的是集中式驱动形式。但是集中式驱动形式的传动部件多、传动效率低、控制 复杂的缺点逐渐显现,而分布式驱动形式取消了这些传动部件,将驱动电机直接安装在驱 动轮内。这种设计形式在控制上有很大的优势,如:四个车轮均可直接驱动或制动,且其转 矩在允许范围内可自由分配,有助于提升车辆的各项性能;单个电机的功率相应减小,整车 布置灵活性提升;电机响应迅速准确,可结合驱动防滑、制动防滑等系统使车辆更稳定、安 全等。分布式驱动电动汽车由于具备上述多个优势,已然成为电动汽车后续研究的重点。 智能化、电动化的发展趋势对制动系统提出了更高的要求和挑战,电动助力制动 系统无疑是一个最佳的选择。电动助力制动系统可以调整控制参数来改变助力大小进而获 得不同的踏板感觉。电动助力制动系统可以实现制动踏板和主缸之间的部分解耦和完全解 耦,因此液压制动和再生制动可以协调工作(即串联式制动能量回收或可协调分配式制动 能量回收),即保证了制动回收的经济性,又保持一致踏板感的舒适性。除此之外,电动助力 制动系统具有快速建压的能力和建压舒适性的能力,可以满足紧急制动、自适应巡航控制 等辅助驾驶功能的需求。 对于包括电助力制动系统的分布式驱动汽车的制动控制尚没有相关研究。
技术实现要素:
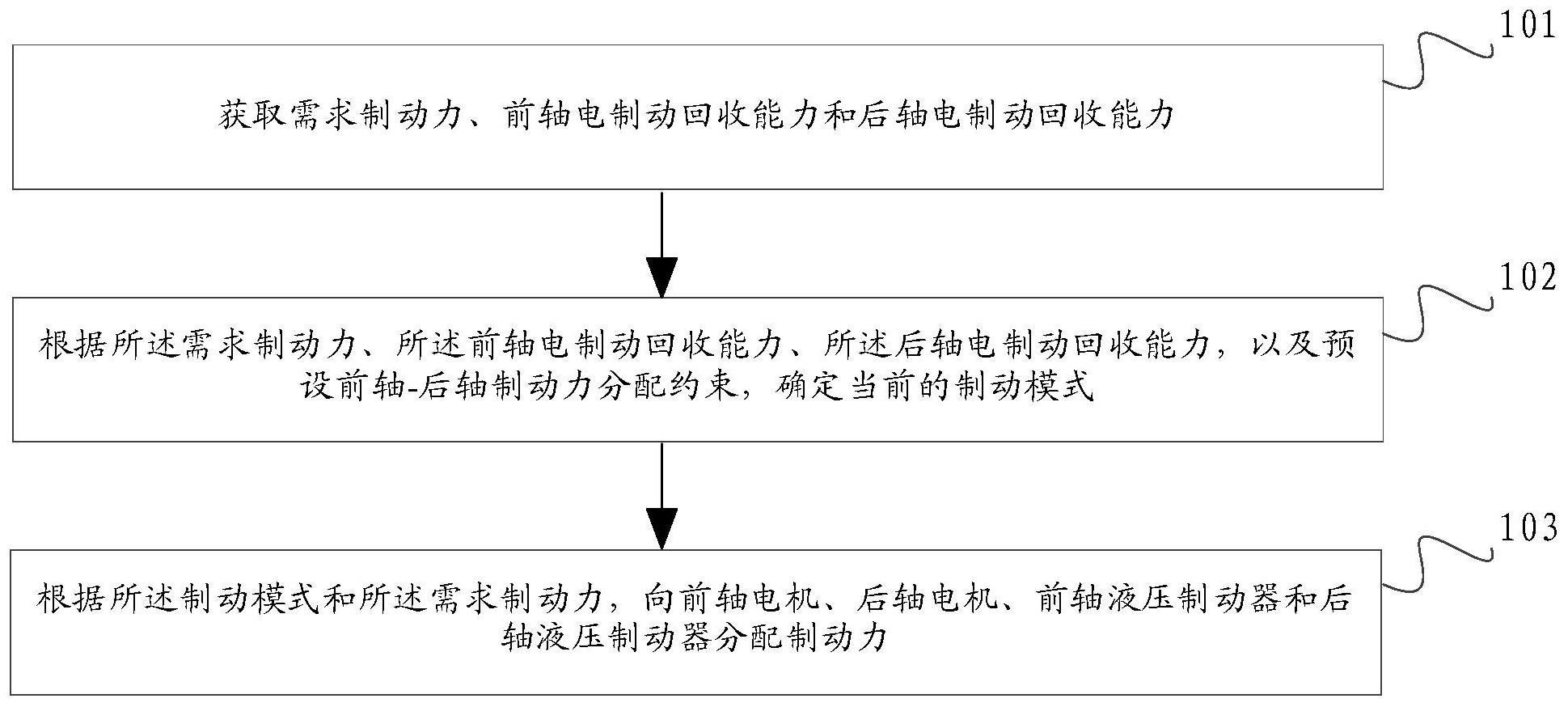
本发明实施例要解决的技术问题是提供一种制动控制方法、装置及控制器,用以 实现整车经济性和减速过程一致性。 为解决上述技术问题,本发明实施例提供了一种制动控制方法,应用于包括电助 力制动系统的分布式驱动汽车,所述方法包括: 获取需求制动力、前轴电制动回收能力和后轴电制动回收能力; 根据所述需求制动力、所述前轴电制动回收能力、所述后轴电制动回收能力,以及 预设前轴-后轴制动力分配约束,确定当前的制动模式; 根据所述制动模式和所述需求制动力,向前轴电机、后轴电机、前轴液压制动器和 后轴液压制动器分配制动力。 可选的,所述制动模式包括:纯电-前轴电制动模式、纯电-前后轴电制动模式、电 液制动模式和纯液制动模式; 所述纯电-前轴电制动模式、所述纯电-前后轴电制动模式、所述电液制动模式和 所述纯液制动模式的优先级依次降低。 6 CN 111605527 A 说 明 书 2/16 页 可选的,获取需求制动力、前轴电制动回收能力和后轴电制动回收能力的步骤包 括: 获取制动踏板行程、前轴左轮电机的第一回收能力、前轴右轮电机的第二回收能 力、后轴左轮电机的第三回收能力和后轴右轮电机的第四回收能力; 根据所述制动踏板行程,获得所述需求制动力; 根据所述第一回收能力和所述第二回收能力中的较小者,获得所述前轴电制动回 收能力; 根据所述第三回收能力和所述第四回收能力中的较小者,获得所述后轴电制动回 收能力。 可选的,根据所述需求制动力、所述前轴电制动回收能力、所述后轴电制动回收能 力,以及预设前轴-后轴制动力分配约束,确定当前的制动模式的步骤包括: 当所述需求制动力小于或等于第一制动力,且所述需求制动力小于或等于所述前 轴电制动回收能力时,确定当前的制动模式为所述纯电-前轴电制动模式; 其中,在所述纯电-前轴电制动模式下,所述前轴电机的制动力等于所述需求制动 力,所述后轴电机、所述前轴液压制动器和所述后轴液压制动器的制动力均为零; 其中,第一制动力为所述预设前轴-后轴制动力分配约束中后轴制动力等于零时 前轴制动力的最大值。 可选的,当前轴电制动能力小于或等于第一制动力时,根据所述需求制动力、所述 前轴电制动回收能力、所述后轴电制动回收能力,以及预设前轴-后轴制动力分配约束,确 定当前的制动模式的步骤包括: 当所述需求制动力大于所述前轴电制动回收能力、所述需求制动力与所述前轴电 制动回收能力的差值小于或等于所述后轴电制动能力、且所述需求制动力与所述前轴电制 动回收能力的差值小于或等于第二制动力时,确定当前的制动模式为所述纯电-前后轴电 制动模式; 其中,在所述纯电-前后轴电制动模式下,所述前轴电机的制动力等于所述前轴电 制动能力,所述后轴电机的制动力等于所述需求制动力与所述前轴电制动能力的差值,所 述前轴液压制动器和所述后轴液压制动器的制动力均为零; 其中,第一制动力为所述预设前轴-后轴制动力分配约束中后轴制动力等于零时 前轴制动力的最大值; 所述第二制动力为所述预设前轴-后轴制动力分配约束中前轴制动力等于所述前 轴电制动能力时所对应的后轴制动力的最大值。 可选的,当前轴电制动能力大于第一制动力时,根据所述需求制动力、所述前轴电 制动回收能力、所述后轴电制动回收能力,以及预设前轴-后轴制动力分配约束,确定当前 的制动模式的步骤包括: 当所述需求制动力大于所述前轴电制动回收能力、所述需求制动力与所述前轴电 制动回收能力的差值小于或等于所述后轴电制动能力、所述需求制动力与所述前轴电制动 回收能力的差值小于或等于第二制动力、且所述需求制动力与所述前轴电制动回收能力的 差值大于或等于第三制动力时,确定当前的制动模式为所述纯电-前后轴电制动模式; 其中,在所述纯电-前后轴电制动模式下,所述前轴电机的制动力等于所述前轴电 7 CN 111605527 A 说 明 书 3/16 页 制动能力,所述后轴电机的制动力等于所述需求制动力与所述前轴电制动能力的差值,所 述前轴液压制动器和所述后轴液压制动器的制动力均为零; 其中,第一制动力为所述预设前轴-后轴制动力分配约束中后轴制动力等于零时 前轴制动力的最大值; 所述第二制动力为所述预设前轴-后轴制动力分配约束中前轴制动力等于所述前 轴电制动能力时所对应的后轴制动力的最大值; 所述第三制动力为所述预设前轴-后轴制动力分配约束中后轴制动力等于第二制 动力时所对应的前轴制动力的最小值。 可选的,所述电液制动模式包括:前轴电制动-前轴液压制动-后轴液压制动的第 一电液制动模式和第二电液制动模式; 根据所述需求制动力、所述前轴电制动回收能力、所述后轴电制动回收能力,以及 预设前轴-后轴制动力分配约束,确定当前的制动模式的步骤包括: 当不满足进入所述纯电-前轴电制动模式或所述纯电-前后轴电制动模式,且前轴 电制动回收能力大于或等于第一预设值时,确定当前的制动模式为所述第一电液制动模 式; 其中,在所述第一电液制动模式下,所述前轴电机的制动力等于所述第一预设值, 所述后轴电机的制动力为零,所述前轴液压制动器和所述后轴液压制动器的制动力之和为 第五制动力; 其中,所述第一预设值为第四制动力与所述第五制动力的差值; 所述第四制动力为当前所述需求制动力在所述预设前轴-后轴制动力分配约束下 所能达到的最大前轴制动力; 所述第五制动力为所述需求制动力与所述第四制动力的差值。 可选的,根据所述需求制动力、所述前轴电制动回收能力、所述后轴电制动回收能 力,以及预设前轴-后轴制动力分配约束,确定当前的制动模式的步骤还包括: 当不满足进入所述纯电-前轴电制动模式或所述纯电-前后轴电制动模式,且前轴 电制动回收能力小于所述第一预设值时,确定当前的制动模式为所述第二电液制动模式; 其中,在所述第二电液制动模式下,所述前轴电机的制动力等于所述前轴电制动 回收能力,所述后轴电机的制动力为零,所述前轴液压制动器和所述后轴液压制动器的制 动力之和为所述需求制动力与所述前轴电制动回收能力的差值。 可选的,所述电液制动模式包括:前轴液压制动-后轴液压制动-后轴电制动的第 三电液制动模式和第四电液制动模式; 根据所述需求制动力、所述前轴电制动回收能力、所述后轴电制动回收能力,以及 预设前轴-后轴制动力分配约束,确定当前的制动模式的步骤包括: 当所述前轴电制动回收能力为零,且所述后轴电制动回收能力大于或等于第二预 设值时,确定当前的制动模式为所述第三电液制动模式; 其中,在所述第三电液制动模式下,所述前轴电机的制动力等于零,所述后轴电机 的制动力等于所述后轴电制动能力,所述前轴液压制动器和所述后轴液压制动器的制动力 之和为所述需求制动力与所述后轴电制动回收能力的差值; 其中,所述第二预设值为第六制动力与第七制动力的差值; 8 CN 111605527 A 说 明 书 4/16 页 所述第六制动力为当前所述需求制动力在所述预设前轴-后轴制动力分配约束下 所能达到的最大后轴制动力;所述需求制动力与所述第六制动力的差值为第八制动力; 所述第七制动力为预设纯液压前后轴液压分配曲线上前轴制动力为所述第八制 动力时所对应的后轴制动力。 可选的,根据所述需求制动力、所述前轴电制动回收能力、所述后轴电制动回收能 力,以及预设前轴-后轴制动力分配约束,确定当前的制动模式的步骤还包括: 当所述前轴电制动回收能力为零,且所述后轴电制动回收能力小于所述第二预设 值时,确定当前的制动模式为所述第四电液制动模式; 其中,在所述第三电液制动模式下,所述前轴电机的制动力等于零,所述后轴电机 的制动力等于所述第二预设值,所述前轴液压制动器和所述后轴液压制动器的制动力之和 为所述需求制动力与所述第二预设值的差值。 可选的,根据所述需求制动力、所述前轴电制动回收能力、所述后轴电制动回收能 力,以及预设前轴-后轴制动力分配约束,确定当前的制动模式的步骤包括: 当所述前轴电制动回收能力等于零,且所述后轴电制动回收能力等于零时,确定 当前的制动模式为所述纯液制动模式; 其中,在所述纯液制动模式下,所述前轴电机的制动力等于零,所述后轴电机的制 动力等于零,所述前轴液压制动器和所述后轴液压制动器的制动力之和等于所述需求制动 力,所述前轴液压制动器和所述后轴液压制动器的制动力按预设纯液压前后轴液压分配曲 线分配。 根据本发明另一方面,本发明实施例还提供了一种制动控制装置,应用于包括电 助力制动系统的分布式驱动汽车,所述装置包括: 获取模块,用于获取需求制动力、前轴电制动回收能力和后轴电制动回收能力; 确定模块,用于根据所述需求制动力、所述前轴电制动回收能力、所述后轴电制动 回收能力,以及预设前轴-后轴制动力分配约束,确定当前的制动模式; 控制模块,用于根据所述制动模式和所述需求制动力,向前轴电机、后轴电机、前 轴液压制动器和后轴液压制动器分配制动力。 根据本发明另一方面,本发明实施例还提供了一种控制器,包括处理器、存储器及 存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理 器执行时实现如上所述的制动控制方法的步骤。 根据本发明另一方面,本发明实施例还提供了一种计算机可读存储介质,所述计 算机可读存储介质上存储计算机程序,所述计算机程序被处理器执行时实现如上所述的制 动控制方法的步骤。 与现有技术相比,本发明实施例提供的一种制动控制方法、装置及控制器,至少具 有以下有益效果:本发明实施例通过获取需求制动力、前轴电制动回收能力和后轴电制动 回收能力,结合预设前轴-后轴制动力分配约束,确定当前的制动模式,合理的向前轴电机、 后轴电机、前轴液压制动器和后轴液压制动器分配制动力,从而实现整车经济性和减速过 程一致性。 9 CN 111605527 A 说 明 书 5/16 页 附图说明 图1为本发明实施例的制动控制方法的流程图; 图2为本发明实施例的制动控制装置的结构示意图; 图3为本发明实施例的预设前轴-后轴制动力分配约束示意图之一; 图4为本发明实施例的踏板里程-需求制动力关系示意图; 图5为本发明实施例的预设前轴-后轴制动力分配约束示意图之二; 图6为本发明实施例的预设前轴-后轴制动力分配约束示意图之三; 图7为本发明实施例的预设前轴-后轴制动力分配约束示意图之四; 图8为本发明实施例的预设前轴-后轴制动力分配约束示意图之五; 图9为本发明实施例的预设前轴-后轴制动力分配约束示意图之六; 图10为本发明实施例的预设前轴-后轴制动力分配约束示意图之七; 图11为本发明实施例的预设前轴-后轴制动力分配约束示意图之八; 图12为本发明实施例的预设前轴-后轴制动力分配约束示意图之九。











