
技术摘要:
本申请实施例提供一种设备巡检作业的检测方法及装置,方法包括:若检测到持有移动终端的目标巡检人员已到达巡检路径中的当前设备处,则周期性采集该移动终端的移动传感数据,直至接收到该移动终端发送的当前设备的二维码信息;根据移动传感数据与对应的预设条件之间的 全部
背景技术:
随着科技的飞速发展,很多企业都选用巡检机器人进行设备巡检,然而,由于设备 巡检工作中可能会面对各类突发情形,而巡检机器人显然存在诸多处理能力限制,因此,一 些企业仍然采用巡检人员进行巡检的方式来随机应变的应对这些突发情形。在此基础上, 为了能够采用巡检人员进行巡检的方式的有效性,企业需要对巡检人员进行设备巡检作业 的情况进行检测,以保证巡检人员真实有效地进行了设备巡检。 目前,对巡检人员进行设备巡检作业进行检测的方式通常为通过卫星定位等方式 获取巡检人员的位置信息,但随着位置信息造假或隐藏的软件的出现,该种方式显然无法 保证设备巡检作业的真实有效,而在另外一种方式中,通过在设备上设置唯一对应的二维 码,并让巡检人员到达设备处后扫描该二维码,或者通过卫星定位等方式获取巡检人员的 位置信息。 但是,随着代打卡工具的出现,以及设备上的二维码图像可以预先被拍照保存等 客观因此的存在,通过扫码检测巡检人员是否真实的进行了设备巡检的方式也不再能够保 证其有效性。
技术实现要素:
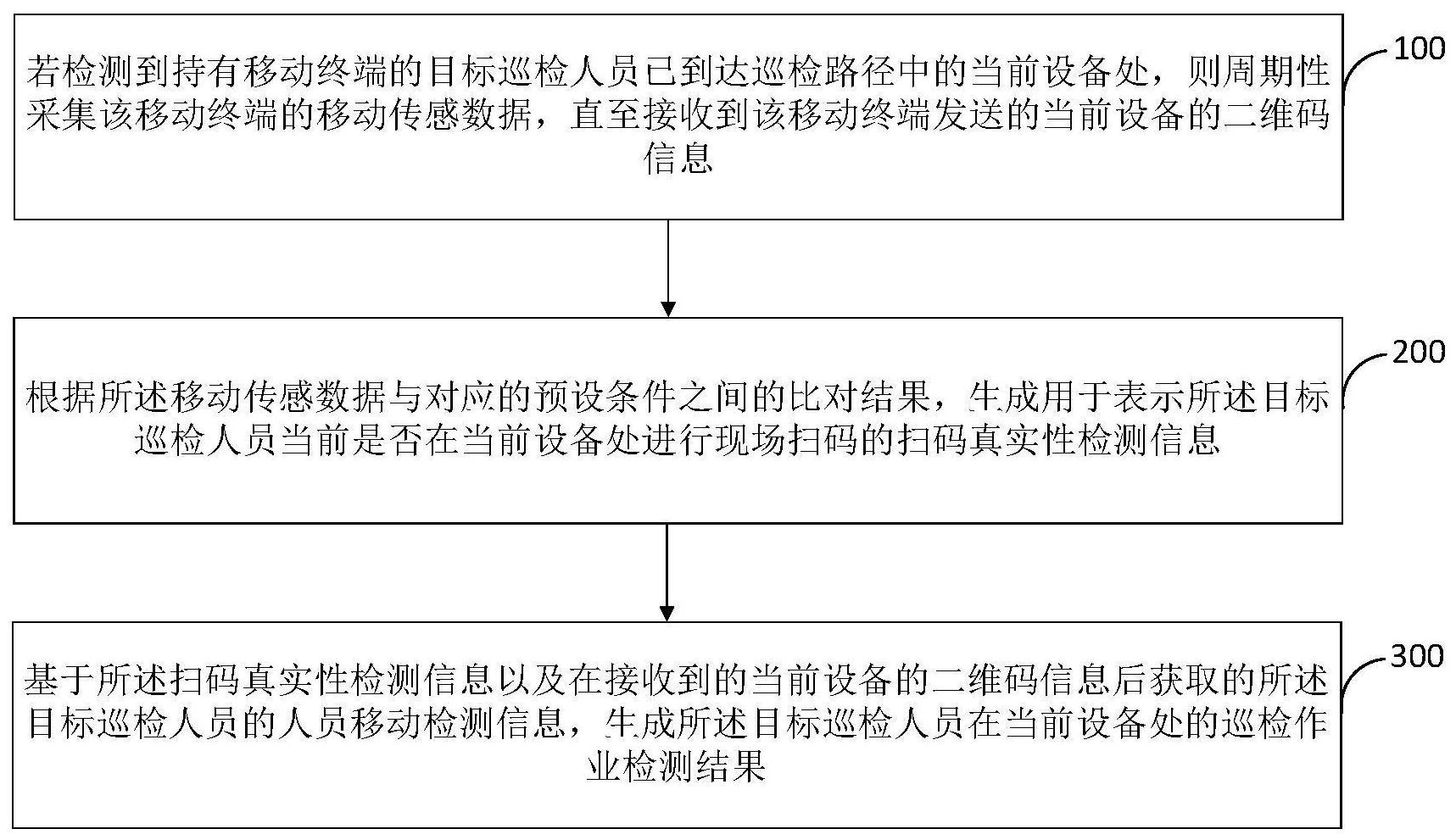
针对现有技术中的问题,本申请提供一种设备巡检作业的检测方法及装置,能够 有效提高设备巡检作业检测的真实性及可靠性,进而能够有效提高被巡检设备存放或运行 的安全性及可靠性。 为解决上述技术问题,本申请提供以下技术方案: 第一方面,本申请提供一种设备巡检作业的检测方法,包括: 若检测到持有移动终端的目标巡检人员已到达巡检路径中的当前设备处,则周期 性采集该移动终端的移动传感数据,直至接收到该移动终端发送的当前设备的二维码信 息; 根据所述移动传感数据与对应的预设条件之间的比对结果,生成用于表示所述目 标巡检人员当前是否在当前设备处进行现场扫码的扫码真实性检测信息; 基于所述扫码真实性检测信息以及在接收到的当前设备的二维码信息后获取的 所述目标巡检人员的人员移动检测信息,生成所述目标巡检人员在当前设备处的巡检作业 检测结果。 进一步地,所述移动传感数据包括:方向传感数据; 相对应的,所述根据所述移动传感数据与对应的预设条件之间的比对结果,生成 用于表示所述目标巡检人员当前是否在当前设备处进行现场扫码的扫码真实性检测信息, 包括: 7 CN 111723880 A 说 明 书 2/21 页 根据预存储的当前设备的二维码图像的设置位置信息确定目标方向信息,其中, 所述目标方向信息包括:水平方向或竖直方向; 判断所述方向传感数据对应的方向信息与所述目标方向信息是否相同; 若是,则生成用于表示所述目标巡检人员在当前设备处的扫码方向与所述二维码 图像的设置位置相对应的第一方向检测信息; 若否,则生成用于表示所述目标巡检人员在当前设备处的扫码方向与所述二维码 图像的设置位置不对应的第二方向检测信息; 将当前设备的唯一标识与对应的所述第一方向检测信息或所述第二方向检测信 息添加至所述扫码真实性检测信息中。 进一步地,所述根据所述移动传感数据与对应的预设条件之间的比对结果,生成 用于表示所述目标巡检人员当前是否在当前设备处进行现场扫码的扫码真实性检测信息, 还包括: 根据预存储的当前设备的二维码图像的设置位置信息确定目标倾斜角度范围; 判断所述方向传感数据对应的倾斜角度是否在所述目标倾斜角度范围内; 若是,则生成用于表示所述目标巡检人员在当前设备处的扫码倾斜角度与所述二 维码图像的设置位置相对应的第一倾斜角度检测信息; 若否,则生成用于表示所述目标巡检人员在当前设备处的扫码倾斜角度与所述二 维码图像的设置位置不对应的第二倾斜角度检测信息; 将当前设备的唯一标识与对应的所述第一倾斜角度检测信息或所述第二倾斜角 度检测信息添加至所述扫码真实性检测信息中。 进一步地,所述移动传感数据包括:旋转传感数据; 相对应的,所述根据所述移动传感数据与对应的预设条件之间的比对结果,生成 用于表示所述目标巡检人员当前是否在当前设备处进行现场扫码的扫码真实性检测信息, 包括: 判断所述旋转传感数据中是否对应有旋转角度; 若是,则生成用于表示所述目标巡检人员对所述移动终端进行旋转的第一旋转检 测信息; 若否,则生成用于表示所述目标巡检人员未对所述移动终端进行旋转的第二旋转 检测信息; 将当前设备的唯一标识与对应的所述第一旋转检测信息或所述第二旋转检测信 息添加至所述扫码真实性检测信息中。 进一步地,所述移动传感数据包括:相隔预设时间的分别获取的两个加速度传感 数据; 相对应的,所述根据所述移动传感数据与对应的预设条件之间的比对结果,生成 用于表示所述目标巡检人员当前是否在当前设备处进行现场扫码的扫码真实性检测信息, 包括: 获取两个所述加速度传感数据之间的差值; 判断两个所述加速度传感数据之间的差值是否大于加速度阈值内; 若是,则生成用于表示所述目标巡检人员的用户终端发生晃动的第一晃动检测信 8 CN 111723880 A 说 明 书 3/21 页 息; 若否,则生成用于表示所述目标巡检人员的用户终端未发生晃动的第二晃动检测 信息; 将当前设备的唯一标识与对应的所述第一晃动检测信息或所述第二晃动检测信 息添加至所述扫码真实性检测信息中。 进一步地,所述若检测到持有移动终端的目标巡检人员已到达巡检路径中的当前 设备处,则周期性采集该移动终端的移动传感数据,直至接收到该移动终端发送的当前设 备的二维码信息,包括: 若接收到所述目标巡检人员的移动终端的二维码扫码功能开启消息,和/或,若接 收到设置在当前设备处的人体接近传感器采集的人员接近信号,则判定该目标巡检人员已 到达巡检路径中的当前设备处; 以预设的时间间隔连续接收设置在所述目标巡检人员的移动终端的传感器采集 的移动传感数据,直至接收所述目标巡检人员的移动终端发送的当前设备的二维码信息后 停止接收所述移动传感数据。 进一步地,在所述基于所述扫码真实性检测信息以及在接收到的当前设备的二维 码信息后获取的所述目标巡检人员的人员移动检测信息,生成所述目标巡检人员在当前设 备处的巡检作业检测结果之前,还包括: 接收所述目标巡检人员的移动终端发送的当前设备的二维码信息; 根据当前设备的二维码信息,分别获取预存储的当前设备和巡检路径中的上一设 备的位置信息,并采集所述移动终端从上一设备到达当前设备之间的GPS轨迹信息; 判断所述GPS轨迹信息的开始节点与上一设备的位置信息是否相同,并判断所述 GPS轨迹信息的结束节点与当前设备的位置信息是否相同; 若所述开始节点与上一设备的位置信息相同,且所述结束节点与当前设备的位置 信息相同,则生成用于表示所述目标巡检人员的巡检轨迹与预设轨迹对应的第一轨迹检测 信息; 若所述开始节点与上一设备的位置信息不同,和/或,所述结束节点与当前设备的 位置信息不同,则生成用于表示所述目标巡检人员的巡检轨迹与预设轨迹不对应的第二轨 迹检测信息; 将当前设备的唯一标识与对应的所述第一轨迹检测信息或所述第二轨迹检测信 息添加至所述人员移动检测信息中。 进一步地,在所述基于所述扫码真实性检测信息以及在接收到的当前设备的二维 码信息后获取的所述目标巡检人员的人员移动检测信息,生成所述目标巡检人员在当前设 备处的巡检作业检测结果之前,还包括: 接收所述目标巡检人员的移动终端发送的当前设备的二维码信息; 采集所述移动终端从上一设备到达当前设备之间的耗费时长和新增计步数; 根据所述耗费时长和新增计步数生成所述目标巡检人员当前的巡查评分; 将当前设备的唯一标识与对应的所述巡查评分添加至所述人员移动检测信息中。 进一步地,所述根据所述耗费时长和新增计步数生成所述目标巡检人员当前的巡 查评分,包括: 9 CN 111723880 A 说 明 书 4/21 页 应用预设的无感化巡查认证公式,根据所述耗费时长和新增计步数生成所述目标 巡检人员当前的巡查评分; 其中,所述无感化巡查认证公式用于表示时间参数和步数参数的加和结果,与所 述巡查评分之间的对应关系; 所述时间参数基于所述耗费时长和预设的动态赋值获取,所述步数参数基于所述 新增计步数和平均步数获取,且该平均步数基于所述新增计步数和所述耗费时长获取。 第二方面,本申请提供一种设备巡检作业的检测装置,包括: 数据采集模块,用于若检测到持有移动终端的目标巡检人员已到达巡检路径中的 当前设备处,则周期性采集该移动终端的移动传感数据,直至接收到该移动终端发送的当 前设备的二维码信息; 扫码检测模块,用于根据所述移动传感数据与对应的预设条件之间的比对结果, 生成用于表示所述目标巡检人员当前是否在当前设备处进行现场扫码的扫码真实性检测 信息; 作业检测结果生成模块,用于基于所述扫码真实性检测信息以及在接收到的当前 设备的二维码信息后获取的所述目标巡检人员的人员移动检测信息,生成所述目标巡检人 员在当前设备处的巡检作业检测结果。 进一步地,所述移动传感数据包括:方向传感数据; 相对应的,所述扫码检测模块包括:方向检测单元,该方向检测单元用于执行下述 内容: 根据预存储的当前设备的二维码图像的设置位置信息确定目标方向信息,其中, 所述目标方向信息包括:水平方向或竖直方向; 判断所述方向传感数据对应的方向信息与所述目标方向信息是否相同; 若是,则生成用于表示所述目标巡检人员在当前设备处的扫码方向与所述二维码 图像的设置位置相对应的第一方向检测信息; 若否,则生成用于表示所述目标巡检人员在当前设备处的扫码方向与所述二维码 图像的设置位置不对应的第二方向检测信息; 将当前设备的唯一标识与对应的所述第一方向检测信息或所述第二方向检测信 息添加至所述扫码真实性检测信息中。 进一步地,所述扫码检测模块还包括:倾斜角度检测单元,该倾斜角度检测单元用 于执行下述内容: 根据预存储的当前设备的二维码图像的设置位置信息确定目标倾斜角度范围; 判断所述方向传感数据对应的倾斜角度是否在所述目标倾斜角度范围内; 若是,则生成用于表示所述目标巡检人员在当前设备处的扫码倾斜角度与所述二 维码图像的设置位置相对应的第一倾斜角度检测信息; 若否,则生成用于表示所述目标巡检人员在当前设备处的扫码倾斜角度与所述二 维码图像的设置位置不对应的第二倾斜角度检测信息; 将当前设备的唯一标识与对应的所述第一倾斜角度检测信息或所述第二倾斜角 度检测信息添加至所述扫码真实性检测信息中。 进一步地,所述移动传感数据包括:旋转传感数据; 10 CN 111723880 A 说 明 书 5/21 页 相对应的,所述扫码检测模块包括:旋转检测单元,该旋转检测单元用于执行下述 内容: 判断所述旋转传感数据中是否对应有旋转角度; 若是,则生成用于表示所述目标巡检人员对所述移动终端进行旋转的第一旋转检 测信息; 若否,则生成用于表示所述目标巡检人员未对所述移动终端进行旋转的第二旋转 检测信息; 将当前设备的唯一标识与对应的所述第一旋转检测信息或所述第二旋转检测信 息添加至所述扫码真实性检测信息中。 进一步地,所述移动传感数据包括:相隔预设时间的分别获取的两个加速度传感 数据; 相对应的,所述扫码检测模块包括:晃动检测单元,该晃动检测单元用于执行下述 内容: 获取两个所述加速度传感数据之间的差值; 判断两个所述加速度传感数据之间的差值是否大于加速度阈值内; 若是,则生成用于表示所述目标巡检人员的用户终端发生晃动的第一晃动检测信 息; 若否,则生成用于表示所述目标巡检人员的用户终端未发生晃动的第二晃动检测 信息; 将当前设备的唯一标识与对应的所述第一晃动检测信息或所述第二晃动检测信 息添加至所述扫码真实性检测信息中。 进一步地,所述数据采集模块具体用于执行下述内容: 若接收到所述目标巡检人员的移动终端的二维码扫码功能开启消息,和/或,若接 收到设置在当前设备处的人体接近传感器采集的人员接近信号,则判定该目标巡检人员已 到达巡检路径中的当前设备处; 以预设的时间间隔连续接收设置在所述目标巡检人员的移动终端的传感器采集 的移动传感数据,直至接收所述目标巡检人员的移动终端发送的当前设备的二维码信息后 停止接收所述移动传感数据。 进一步地,还包括:轨迹检测模块,该轨迹检测模块用于执行下述内容: 接收所述目标巡检人员的移动终端发送的当前设备的二维码信息; 根据当前设备的二维码信息,分别获取预存储的当前设备和巡检路径中的上一设 备的位置信息,并采集所述移动终端从上一设备到达当前设备之间的GPS轨迹信息; 判断所述GPS轨迹信息的开始节点与上一设备的位置信息是否相同,并判断所述 GPS轨迹信息的结束节点与当前设备的位置信息是否相同; 若所述开始节点与上一设备的位置信息相同,且所述结束节点与当前设备的位置 信息相同,则生成用于表示所述目标巡检人员的巡检轨迹与预设轨迹对应的第一轨迹检测 信息; 若所述开始节点与上一设备的位置信息不同,和/或,所述结束节点与当前设备的 位置信息不同,则生成用于表示所述目标巡检人员的巡检轨迹与预设轨迹不对应的第二轨 11 CN 111723880 A 说 明 书 6/21 页 迹检测信息; 将当前设备的唯一标识与对应的所述第一轨迹检测信息或所述第二轨迹检测信 息添加至所述人员移动检测信息中。 进一步地,还包括:耗时检测模块,该耗时检测模块用于执行下述内容: 接收所述目标巡检人员的移动终端发送的当前设备的二维码信息; 采集所述移动终端从上一设备到达当前设备之间的耗费时长和新增计步数; 根据所述耗费时长和新增计步数生成所述目标巡检人员当前的巡查评分; 将当前设备的唯一标识与对应的所述巡查评分添加至所述人员移动检测信息中。 进一步地,所述耗时检测模块包括:无感化巡查认证单元,该无感化巡查认证单元 用于执行下述内容: 应用预设的无感化巡查认证公式,根据所述耗费时长和新增计步数生成所述目标 巡检人员当前的巡查评分; 其中,所述无感化巡查认证公式用于表示时间参数和步数参数的加和结果,与所 述巡查评分之间的对应关系; 所述时间参数基于所述耗费时长和预设的动态赋值获取,所述步数参数基于所述 新增计步数和平均步数获取,且该平均步数基于所述新增计步数和所述耗费时长获取。 第三方面,本申请提供一种电子设备,包括存储器、处理器及存储在存储器上并可 在处理器上运行的计算机程序,所述处理器执行所述程序时实现所述的设备巡检作业的检 测方法。 第四方面,本申请提供一种计算机可读存储介质,其上存储有计算机程序,该计算 机程序被处理器执行时实现所述的设备巡检作业的检测方法。 由上述技术方案可知,本申请提供的一种设备巡检作业的检测方法及装置,方法 包括:若检测到持有移动终端的目标巡检人员已到达巡检路径中的当前设备处,则周期性 采集该移动终端的移动传感数据,直至接收到该移动终端发送的当前设备的二维码信息; 根据所述移动传感数据与对应的预设条件之间的比对结果,生成用于表示所述目标巡检人 员当前是否在当前设备处进行现场扫码的扫码真实性检测信息;基于所述扫码真实性检测 信息以及在接收到的当前设备的二维码信息后获取的所述目标巡检人员的人员移动检测 信息,生成所述目标巡检人员在当前设备处的巡检作业检测结果,能够有效对巡检人员在 巡检路径中的设备处的扫码真实性进行检测,并能够同时实现扫码真实性和巡检人员移动 情形的获取,能够有效提高设备巡检作业检测的真实性及可靠性,进而能够有效提高被巡 检设备存放或运行的安全性及可靠性。 附图说明 为了更清楚地说明本申请实施例或现有技术中的技术方案,下面将对实施例或现 有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本申请 的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据 这些附图获得其他的附图。 图1是本申请实施例中的设备巡检作业的检测方法的流程示意图。 图2是本申请实施例中的设备巡检作业的检测方法中步骤200的第一种具体流程 12 CN 111723880 A 说 明 书 7/21 页 示意图。 图3是本申请实施例中的设备巡检作业的检测方法中步骤200的第二种具体流程 示意图。 图4是本申请实施例中的设备巡检作业的检测方法中步骤200的第三种具体流程 示意图。 图5是本申请实施例中的设备巡检作业的检测方法中步骤200的第四种具体流程 示意图。 图6是本申请实施例中的设备巡检作业的检测方法中步骤100的具体流程示意图。 图7是本申请实施例中的设备巡检作业的检测方法中步骤011至步骤016的具体流 程示意图。 图8是本申请实施例中的设备巡检作业的检测方法中步骤021至步骤024的具体流 程示意图。 图9是本申请应用实例提供的设备巡检作业的检测系统的逻辑图。 图10是本申请应用实例提供的设备巡检作业的检测判断逻辑图。 图11是本申请应用实例提供的无感化巡查认证算法的流程图。 图12是本申请实施例中的设备巡检作业的检测装置的第一种结构示意图。 图13是本申请实施例中的设备巡检作业的检测装置中扫码检测模块的具体结构 示意图。 图14是本申请实施例中的设备巡检作业的检测装置的第二种结构示意图。 图15是本申请实施例中的设备巡检作业的检测装置的第三种结构示意图。 图16是本申请实施例中的设备巡检作业的检测装置中耗时检测模块的具体结构 示意图。 图17是本申请实施例中的电子设备的结构示意图。











