
技术摘要:
本发明提供一种基于滑模变结构的多电机系统高性能协同控制方法,包括以下步骤:S1.设计多电机系统协同控制结构框架图;S2.建立以多永磁同步电机为执行器的数学模型及其状态方程;S3.设计多电机系统的转速环控制器和转矩控制器;S4.对S3中所设计的转速环控制器和转矩控 全部
背景技术:
轧机传动系统作为冶金工业生产过程中尤为关键的工艺环节,在冶金行业中已占 据着举足轻重的地位。 轧机传动系统其实质是属于多电机同步控制技术范畴,而多电机同步控制系统又 属于一种强耦合,非线性和多变量的复杂模型,加上轧机传动系统对系统各电机的转矩和 转速配置了苛刻的控制需求,使得系统对多电机的协同控制性能提出了更高的要求。 在现有的轧机传动系统中,多电机的协同控制性能还是存在一定的不足,比如不 能兼顾转矩和转速的双同步控制问题,这将导致轧机传动控制系统各电机的协同性能得不 到有力保障;而协同性能是多电机同步控制技术在轧机传动系统中有效应用的关键,因为 它直接影响机器设备生产的可靠性及产品质量的好坏。
技术实现要素:
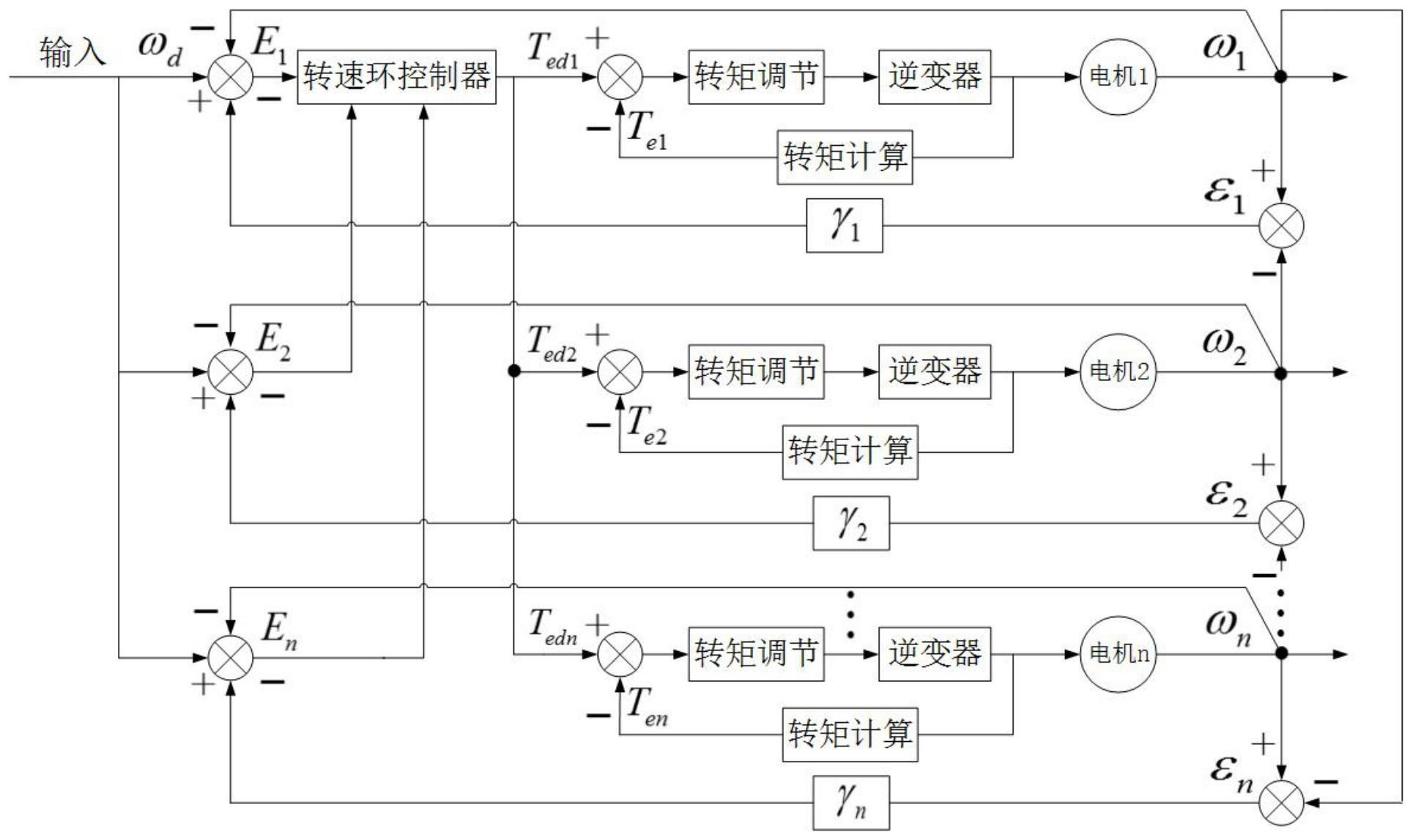
本发明针对现有的多电机系统控制技术中,关于无法确保各电机在保证转矩均衡 的同时,也保持转速同步,使得系统开卷和卷取张力实现动态平衡的问题;提供一种基于滑 模变结构的多电机系统高性能协同控制方法。 为实现上述目的,本发明采用以下技术方案: 一种基于滑模变结构的多电机系统高性能协同控制方法,包括以下步骤: S1、设计多电机系统协同控制结构框架图; S2、建立以多永磁同步电机为执行器的数学模型及其状态方程; S3、设计多电机系统的转速环控制器和转矩控制器; S4、对S3中所设计的转速环控制器和转矩控制器进行稳定性证明。 进一步的,在步骤S1中具体步骤包括: S11:系统第j(j=1,2,3,…,n)台电机的跟踪误差ej为: ej=ωd-ωj 其中,ωd和ωj分别为第j台电机的输入转速和输出转速,当j=n时,ωj 1=ω1; S12:根据所设计的多电机系统协同控制结构框架图,可知系统第j台电机补偿后 的跟踪误差Ej为: Ej=ej-γj(ωj-ωj 1) 其中,γj代表系统第j台电机的反馈增益; S13:定义系统第j台电机与相邻第(j 1)台电机的同步误差为εj,则有: εj=ωj-ωj 1 S14:根据跟踪误差ej和同步误差εj的表达式,可得系统第j台电机经过耦合补偿之 4 CN 111614287 A 说 明 书 2/7 页 后的跟踪误差的一般表达式为: Ej=ej-γjεj S15:设计系统各电机的反馈增益满足如下不等式,确保所设计的多电机系统协同 控制结构框架图的合理性以及保证系统各电机转速的同步性;系统各电机的反馈增益为: (1 γ1)(1 γ2)(1 γ3)···(1 γn)-γ1γ2γ3···γn≠0 进一步的,在步骤S2中永磁同步电机的数学模型为: 其中,udj、uqj分别为dq轴方向上的电压分量,idj、iqj分别为定子电流的直轴分量和 交轴分量;Rsj为定子绕组电阻,ωj为转子电角速度;Ldj、Lqj分别为直轴和交轴的同步电感, ψfj为转子磁链。 进一步的,永磁同步电机的转矩方程和机械运动方程为: 其中,Tej为电磁转矩,TLj为轴上的负载转矩,npj为电机的极对数,RΩj为电机的旋 转阻力系数,Ωj为转子的机械角速度,Jj为转动惯量。 进一步的,在步骤S3中转速环控制器为: 进一步的,在步骤S3中转矩控制器为: 进一步的,sgn(sj)可采用连续函数 来代替,其中δ的取值为较小的正常数。 进一步的,在步骤S4中通过Lyapunov函数来证明S3中转速环控制器和转矩控制器 的稳定性。 进一步的,在步骤S2中永磁同步电机类型为隐极式永磁同步电机。 本发明的有益效果为:有效克服了多电机同步控制系统的多变量,强耦合和物理 参数时变等问题,使系统具有较快的动态响应特性,较高的可靠性和较强的协同能力,很好 的实现了系统各电机能够满足转矩和转速全时域同步的复杂工况要求,对轧机传动控制系 统的实际工程应用具有一定的帮助。 附图说明 图1为基于滑模变结构的多电机系统高性能协同控制结构框架图。 5 CN 111614287 A 说 明 书 3/7 页











