
技术摘要:
本发明公开了一种用于常压封装MEMS陀螺仪解调相角补偿的系统和方法,该系统包括陀螺仪闭环驱动模块、检测模态驱动与检测模块、补偿模块、信号检测模块;陀螺仪闭环驱动模块跟踪MEMS陀螺仪的驱动模态谐振频率ωx并产生ωx的正弦波信号sinωxt与sin(2ωxt),并将sin(2ωx 全部
背景技术:
MEMS陀螺仪作为一种利用哥氏效应敏感输入角速度的传感器,是MEMS技术在惯性 导航领域的重要应用之一,具有体积小、重量轻、成本低、可批量生产、易于集成等优点,在 军用与民用领域均得到了广泛的应用。MEMS陀螺仪具有驱动模态和检测模态两个工作模 态,其中,驱动模态实时跟踪驱动模态谐振频率并维持驱动方向上恒定的振幅;检测模态实 时检测敏感轴输入角速度引起的模态振动,再利用乘法解调方式获得包含角速度信息的信 号。 为了降低MEMS陀螺仪的制造成本,大气常压封装陀螺仪逐渐受到关注。尽管大气 常压封装降低了陀螺仪的品质因数,从而引入了较大的检测环节解调相角误差,进而限制 了陀螺仪的测量精度。但通过有效解调相角补偿,其性能可得到明显的提升。目前针对大气 常压封装陀螺仪检测环节解调相角的补偿通常采用算法补偿,建立解调相角与温度的模 型,从而通过检测温度实现解调算法的补偿。该方法依赖于算法模型的准确性与系统输出 的重复性,且复杂的算法同样会提升陀螺仪测控系统的复杂度与成本。
技术实现要素:
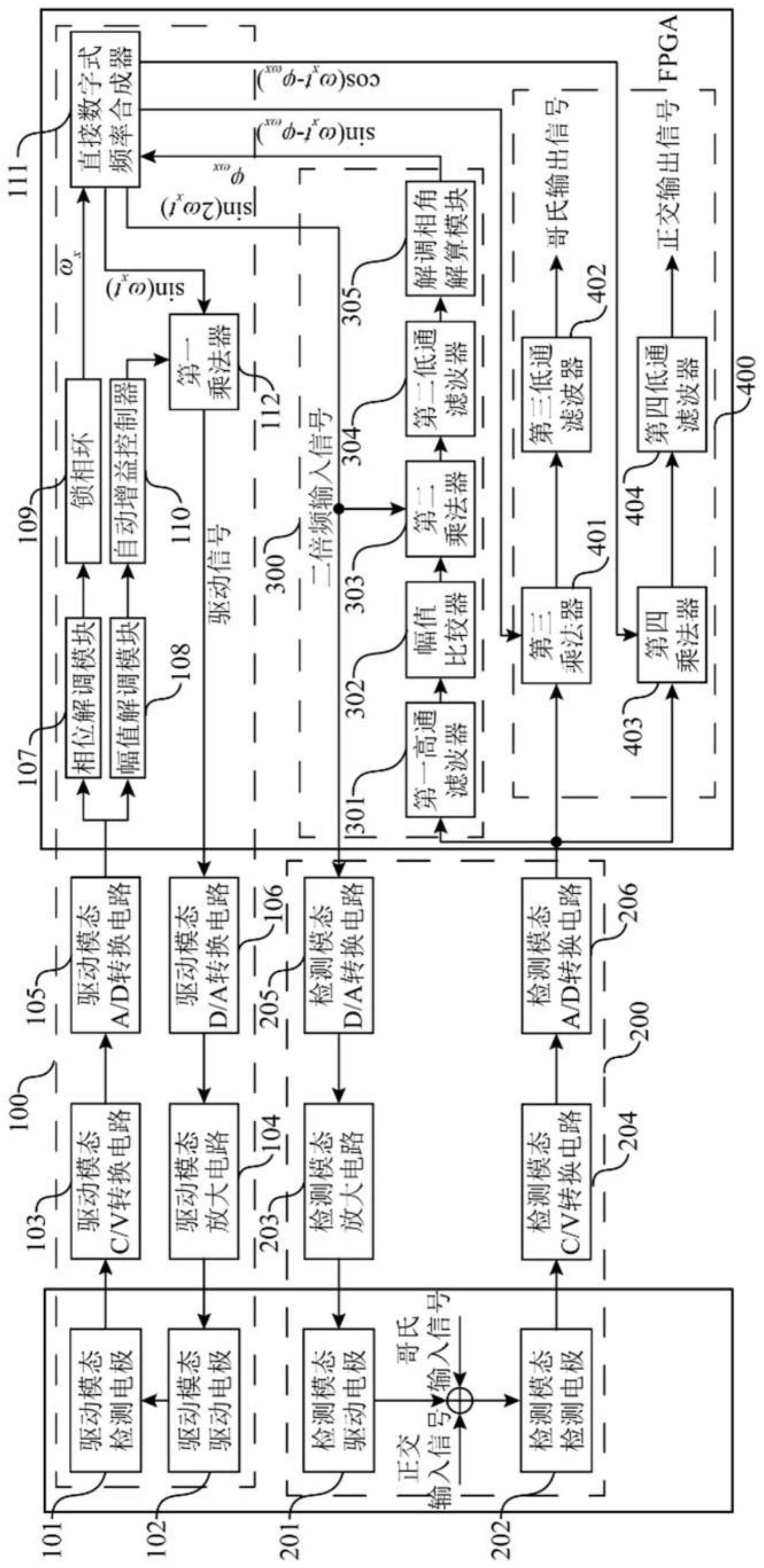
发明目的:为了克服上述现有技术的不足,本发明提供一种用于常压封装MEMS陀 螺仪解调相角补偿的系统。 本发明还提供一种用于常压封装MEMS陀螺仪解调相角补偿的方法。 技术方案:本发明的用于常压封装MEMS陀螺仪解调相角补偿的系统包括:陀螺仪 闭环驱动模块、检测模态驱动与检测模块、补偿模块和信号检测模块;所述陀螺仪闭环驱动 模块用于跟踪硅微陀螺仪的驱动模态谐振频率ωx并产生ωx的单倍频正弦信号sinωxt和 二倍频正弦信号sin(2ωxt),将sinωxt作为反馈实现陀螺仪闭环驱动,并将sin(2ωxt)输 出至所述检测模态驱动与检测模块和所述补偿模块;所述检测模态驱动与检测模块基于正 交输入信号、哥氏输入信号和所述陀螺仪闭环驱动模块输出的二倍频正弦信号sin(2ω xt)、产生检测模态振动信号,并分别输出至所述补偿模块和所述信号检测模块;所述补偿 模块基于所述二倍频正弦信号sin(2ωxt)和所述检测模态振动信号产生解调相角补偿量 并输出至所述陀螺仪闭环驱动模块;所述陀螺仪闭环驱动模块基于ωx和 产生补偿 后的第一解调信号 和第二解调信号 并将 和 输 出至所述信号检测模块;所述信号检测模块基于 和所述检测模态振动信号得到 经补偿的哥氏输出信号,并基于 和所述检测模态振动信号得到经补偿的正交输 出信号;其中,经补偿的哥氏输出信号避免了正交输入信号的干扰。 6 CN 111551162 A 说 明 书 2/6 页 进一步地,所述陀螺仪驱动闭环回路包括驱动模态检测电极、驱动模态驱动电极、 驱动模态C/V转换电路、驱动模态放大电路、驱动模态A/D转换电路、驱动模态D/A转换电路、 相位解调模块、幅值解调模块、锁相环、自动增益控制器、直接数字式频率合成器和第一乘 法器;驱动模态驱动电极用于响应于驱动信号产生振动;驱动模态检测电极检测到驱动模 态驱动电极的振动产生驱动模态振动信号,该驱动模态振动信号依次经由驱动模态C/V转 换电路、驱动模态A/D转换电路处理后分别输入至相位解调模块与幅值解调模块;相位解调 模块进行解调后输出相位相关信号至锁相环,幅值解调模块进行解调后输出幅值相关信号 至自动增益控制器;锁相环基于所述相位相关信号跟踪陀螺仪的所述驱动模态谐振频率 ωx,并将ωx输出至直接数字式频率合成器;自动增益控制器基于所述幅值相关信号产生驱 动信号的幅度;直接数字式频率合成器输出ωx的所述单倍频正弦信号sinωxt和所述二倍 频正弦信号sin2ωxt,并将sin2ωxt输入至检测模态驱动和检测模块和补偿模块;第一乘法 器将驱动信号的幅度与正弦信号sinωxt相乘后得到驱动信号;所述驱动信号依次经由驱 动模态D/A转换电路、驱动模态放大电路处理后输入至驱动模态驱动电极,从而使得驱动模 态检测电极的振幅维持恒定,并实时跟踪驱动模态谐振频率ωx,实现陀螺仪闭环驱动。 进一步地,所述检测模态驱动和检测模块包括检测模态驱动电极、检测模态检测 电极、检测模态放大电路、检测模态C/V转换电路、检测模态D/A转换电路、检测模态A/D转换 电路;所述二倍频正弦信号sin2ωxt依次经由检测模态D/A转换电路、检测模态放大电路处 理后输入至检测模态驱动电极;检测模态检测电极对检测模态驱动电极的输出信号、哥氏 输入信号和正交输入信号进行检测,检测结果依次经由检测模态C/V转换电路、检测模态A/ D转换电路处理后产生所述检测模态振动信号。 进一步地,所述补偿模块包括第一高通滤波器、幅值比较器、第二乘法器、第二低 通滤波器和解调相角解算模块;所述第一高通滤波器对所述检测模态振动信号进行高通滤 波,得到第一次滤波后的正弦波;所述幅值比较器将所述第一次滤波后的正弦波转换成单 位幅值的同频率方波;所述第二乘法器将所述单位幅值的同频率方波乘以所述陀螺仪闭环 驱动模块输出的正弦信号sin(2ωxt),并输出至所述第二低通滤波器得到二倍频相角输出 信号 所述解调相角解算模块对二倍频相角输出信号 进行解算得到 所述解调相角补偿量 并输出至所述陀螺仪闭环驱动模块。 进一步地,所述信号检测模块包括第三乘法器、第三低通滤波器、第四乘法器和第 四低通滤波器;所述第三乘法器与所述第三低通滤波器构成乘法解调,利用 和 所述振动信号得到经补偿的哥氏输出信号;所述第四乘法器与所述第四低通滤波器构成乘 法解调,利用 和所述振动信号得到经补偿的正交输出信号;其中,经补偿的哥氏 输出信号避免了正交输入信号的干扰。 本发明的用于常压封装MEMS陀螺仪解调相角补偿的方法包括:(S1)跟踪硅微陀螺 仪的驱动模态谐振频率ωx,产生ωx的单倍频正弦信号sinωxt和二倍频正弦信号sin(2ω xt),将sinωxt作为反馈实现陀螺仪闭环驱动;(S2)基于所述二倍频正弦信号sin(2ωxt)、 正交输入信号和哥氏输入信号产生检测模态振动信号;(S3)基于所述二倍频正弦信号sin (2ωxt)和所述检测模态振动信号产生解调相角补偿量 基于ωx和 产生解调相角补 偿后的第一解调信号 和第二解调信号 (S4)基于 和所述检 7 CN 111551162 A 说 明 书 3/6 页 测模态振动信号得到经补偿的哥氏输出信号,并基于 和所述检测模态振动信号 得到经补偿的正交输出信号;其中,经补偿的哥氏输出信号避免了正交输入信号的干扰。 有益效果:与现有技术相比,本申请具有以下优点: 1、带有解调相角补偿环节,可以在有效地消除低品质因数所引起的正交输入信号 对哥氏输出信号的影响,降低陀螺仪哥氏输出信号的漂移和噪声; 2、现有技术中需要对陀螺仪解调相角误差进行建模,为实现较好的补偿效果,需 要建立复杂的补偿模型并通过大量的实验标定模型参数,本发明的方案基于输入陀螺仪力 反馈检测梳齿(对应实施例中检测模态驱动电极201)的二倍频信号以此获取解调相角补偿 量,不需要建立繁杂的误差模型,并不依赖复杂算法补偿,有效地减少了陀螺仪系统的成 本。 附图说明 图1为本发明一个实施例涉及的系统框图; 图2为本发明一个实施例中涉及的宽温度范围内 与 的关系曲线。











