
技术摘要:
本发明公开了一种室内三维模型生成方法、介质及系统,其中方法包括以下步骤:获取待建模的室内三维点云数据,并根据所述室内三维点云数据生成对应的二维图片;将所述二维图片输入到预先训练好的语义标注模型,以通过语义标注模型过滤所述二维图片中的干扰线,并提取二 全部
背景技术:
在室内三维建模的过程中,由于采集三维数据的设备自身的限制,以及室内环境 的复杂性,往往会因为可移动物体(例如,桌子、柜子等)的遮挡而导致三维数据中墙面不完 整,与现实出现偏差。 相关技术中,在出现因可移动物体而导致的三维数据不准确问题时,多通过人工 将三维数据与现实记录信息进行比对,并逐一对出错位置进行修改;这种方式由于人工的 不确定性,容易导致错漏被忽略,并且,修改效率低下,耗费极大的人力和物力资源。
技术实现要素:
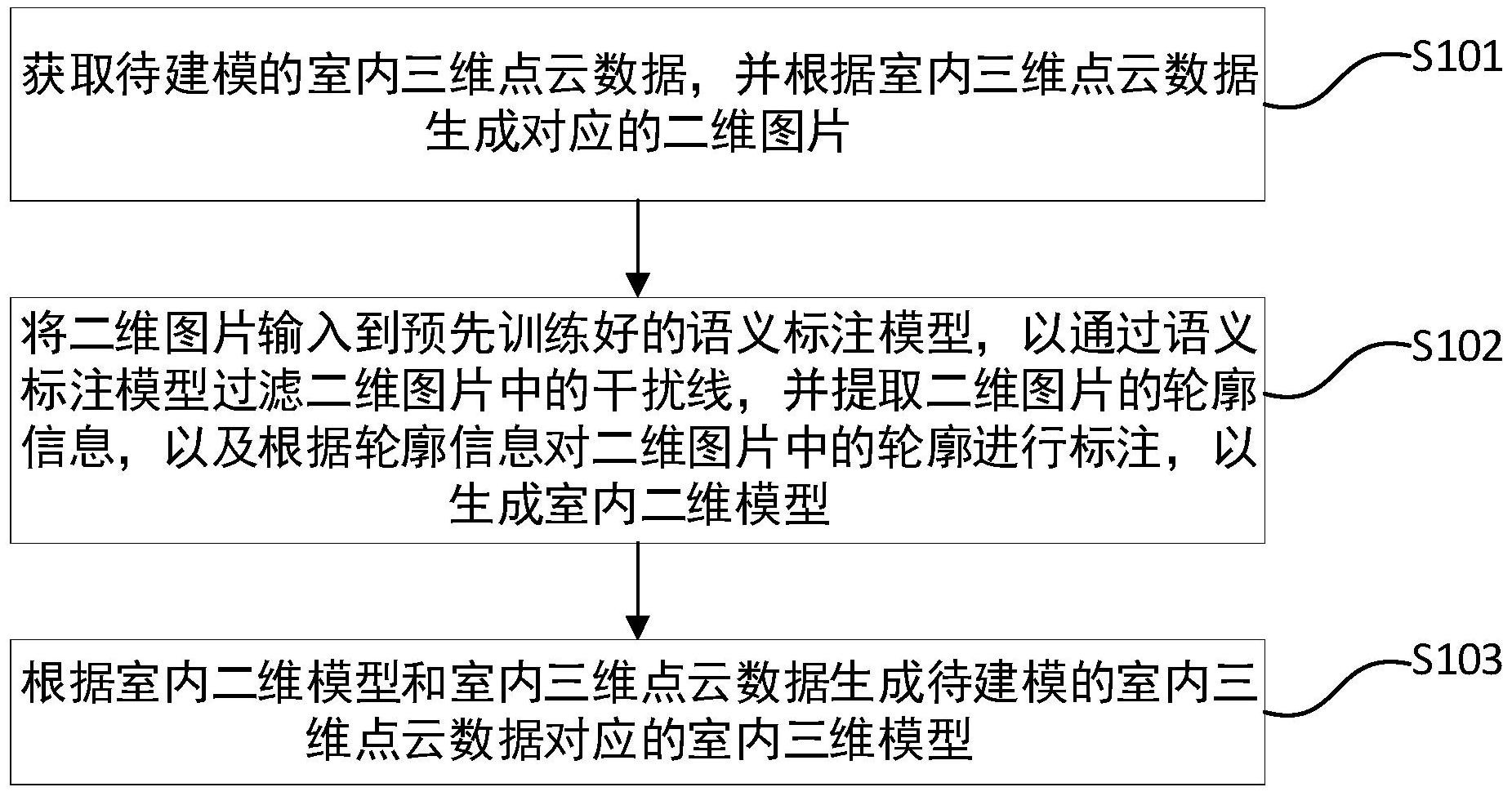
本发明旨在至少在一定程度上解决上述技术中的技术问题之一。为此,本发明的 一个目的在于提出一种室内三维模型生成方法,能够避免因可移动物体妨碍导致的三维点 云缺失等问题对室内建模的影响,并对室内三维数据进行建模,同时,降低三维数据处理过 程中所需要的人力和物力资源。 本发明的第二个目的在于提出一种计算机可读存储介质。 本发明的第三个目的在于提出一种室内三维模型生成系统。 为达到上述目的,本发明第一方面实施例提出了一种室内三维模型生成方法,包 括以下步骤:获取待建模的室内三维点云数据,并根据所述室内三维点云数据生成对应的 二维图片;将所述二维图片输入到预先训练好的语义标注模型,以过滤所述二维图片中的 干扰线,并提取所述二维图片的轮廓信息,以及根据所述轮廓信息对所述二维图片中的轮 廓进行标注,以生成室内二维模型;根据过室内二维模型和所述室内三维点云数据生成所 述待建模的室内三维点云数据对应的室内三维模型。 根据本发明实施例的室内三维模型生成方法,首先,通过三维数据采集设备(例 如,雷达等)获取待建模的室内三维点云数据,并根据室内三维点云数据生成待建模建筑对 应的二维图片;然后,将二维图片输入到预先训练好的语义标注模型,以通过语义标注模型 对二维图片中可移动物体形成的干扰线进行过滤,并提取二维图片的轮廓信息,以及根据 轮廓信息对二维图片中的轮廓进行标注,以生成室内二维模型;接着,根据室内二维模型和 室内三维点云数据进行三维建模,以生成待建模建筑对应的三维模型;从而实现避免因可 移动物体妨碍导致的三维点云缺失等问题对室内建模的影响,并对室内三维数据进行建 模,同时,降低三维数据处理过程中所需要的人力和物力资源。。 另外,根据本发明上述实施例提出的室内三维模型生成方法还可以具有如下附加 的技术特征: 可选地,根据所述室内三维点云数据生成对应的二维图片,包括:根据所述室内三 4 CN 111612886 A 说 明 书 2/9 页 维点云数据计算所有三维点坐标值中的X轴极值和Y轴极值,并根据所述X轴极值和Y轴极 值、预设的网格数量计算每个网格的大小,以及根据所述每个网格的大小对所述二维图片 进行网格化处理;根据每个网格中包含的三维点的数量确定每个网格对应的灰度值,并根 据每个网格对应的灰度值生成二维图片对应的灰度图,以便将所述灰度图输入到所述语义 标注模型进行干扰线的过滤和轮廓的标注。 可选地,根据所述每个网格的大小对所述三维图片进行网格化处理,包括:根据所 述室内三维点云数据计算所有三维点坐标值中的Z轴极值,并去除Z轴坐标为所述Z轴极值 的三维点,以及根据每个三维点的坐标值将去除Z轴极值三维点后的剩余三维点划分到对 应的网格中。 可选地,在将所述二维图片输入到预先训练好的语义标注模型之前,还包括:根据 所述二维图片的大小和预设的切分规格对所述二维图片进行切分,以生成多个切分图片, 以便将所述切分图片输入到预先训练好的语义标注模型进行干扰线的过滤和轮廓标注。 可选地,每个网格的大小根据以下公式计算: 其中,dw表示每个网格的宽度,dh表示每个网格的长度,W表示每一行网格的数量, H表示每一列网格的数量,maxX表示所有三维点坐标值中X轴的最大值,minX表示所有三维 点坐标值中X轴的最小值,maxY表示所有三维点坐标值中Y轴的最大值,minY表示所有三维 点坐标值中Y轴的最小值。 可选地,根据以下公式将三维点划分到对应的网格中: 其中,x表示三维点的X轴坐标值,y表示三维点的Y轴坐标值,minX表示所有三维点 坐标值中X轴的最小值,minY表示所有三维点坐标值中Y轴的最小值,dw表示每个网格的宽 度,dh表示每个网格的长度,u表示网格的横向编号,v表示网格的纵向编号。 可选地,每个网格对应的灰度值根据以下公式计算: 其中,dp表示网格中三维点的数量与灰度值之间的对应关系,maxNum表示每个网 格所包含三维点数量的最大值,minNum表示每个网格所包含三维点数量的最小值,p表示每 个网格对应的灰度值,num表示网格对应的三维点数量。 为达到上述目的,本发明第二方面实施例提出了一种计算机可读存储介质,其上 存储有三维模型生成程序,该三维模型生成程序被处理器执行时实现如上述的室内三维模 型生成方法。 5 CN 111612886 A 说 明 书 3/9 页 根据本发明实施例的计算机可读存储介质,通过存储三维模型生成程序,以使得 处理器在执行该三维模型生成程序时,实现如上述的室内三维模型生成方法,从而避免因 可移动物体妨碍导致的三维点云缺失等问题对室内建模的影响,并对室内三维数据进行建 模,同时,降低三维数据处理过程中所需要的人力和物力资源。为达到上述目的,本发明第 三方面实施例提出了一种室内三维模型生成系统,包括:获取模块,所述获取模块用于获取 待建模的室内三维点云数据,并根据所述室内三维点云数据生成对应的二维图片;语义标 注模块,所述语义标注模块用于将所述二维图片输入到预先训练好的语义标注模型,以通 过所述语义标注模型过滤所述二维图片中的干扰线,并提取所述二维图片的轮廓信息,以 及根据所述轮廓信息对所述二维图片中的轮廓进行标注,以生成室内二维模型;生成模块, 所述生成模块用于根据室内二维模型和所述室内三维点云数据生成所述待建模的室内三 维点云数据对应的室内三维模型。 根据本发明实施例提出的室内三维模型生成系统。设置获取模块对待建模建筑所 对应的室内三维点云数据进行获取,并根据室内三维点云数据生成其所对应的二维图片, 语义标注模块用于将二维图片输入到预先训练好的语义标注模型,以过滤二维图片中的干 扰线;生成模块用于根据过滤后的二维图片和室内三维点云数据生成待建模建筑对应的三 维模型;从而避免因可移动物体妨碍导致的三维点云缺失等问题对室内建模的影响,并对 室内三维数据进行建模,同时,降低三维数据处理过程中所需要的人力和物力资源。 另外,根据本发明上述实施例提出的室内三维模型生成系统还可以具有如下附加 的技术特征: 可选地,还包括: 网格化模块,所述网格化模块用于在根据所述室内三维点云数据生成对应的二维 图片之后,根据所述室内三维点云数据计算所有三维点坐标值中的X轴极值和Y轴极值,并 根据所述X轴极值和Y轴极值、预设的网格数量计算每个网格的大小,以及根据所述每个网 格的大小对所述二维图片进行网格化处理; 灰度图生成模块,所述灰度图生成模块用于根据每个网格中包含的三维点的数量 确定每个网格对应的灰度值,并根据每个网格对应的灰度值生成二维图片对应的灰度图, 以便将所述灰度图输入到所述语义标注模型进行干扰线的过滤和轮廓的标注。 附图说明 图1为根据本发明实施例的室内三维模型生成方法的流程示意图; 图2为根据本发明另一实施例的室内三维模型生成方法的流程示意图; 图3为根据本发明实施例的室内三维模型生成系统的方框示意图; 图4为根据本发明另一实施例的室内三维模型生成系统的方框示意图。











