
技术摘要:
本发明公开了一种多AGV无碰撞运行的路径规划方法及调度系统,所述路经规划方法采用基于优先级的任务调度策略进行调度,可以合理地分配任务,有效提高调度系统的效率,同时采用基于优先级的AGV选择策略,并通过A*算法求出各AGV的最优路径,从而使得运行路径相对畅通,有 全部
背景技术:
随着我国人口红利的逐渐丧失,人工工资不断上升对3C制造企业的成本端构成较 大压力。如何能够在行业内保持相对较低的运营成本,是目前3C制造行业的企业面临的主 要问题。从产品生产的整个加工过程来看,物料大部分时间都用于物料储存、装卸、运输和 待加工状态。因此,提高工厂自动化程度,缩短非加工时间,是降低产品成本的主要途径。在 工业4.0职能工厂的框架内,智能物流是工业4.0的核心组成部分,是连接供应和生产的重 要环节,随着智能制造的不断发展,在生产制造过程中将融入智能制造工艺流程,提高企业 竞争力,促进企业转型升级。 自动导引车(Automated Guided Vehicle,AGV)已成为离散生产车间的主要物料 配送方式,以物料搬运路径的高度自由等特点,开始逐步的替代传统的人工搬运,作为物流 系统的主力军。 现阶段AGV部署量日益增大,单AGV产品的技术水平相对成熟,发挥多AGV的协同作 业能力才是该领域的研究核心与重点,面对大规模AGV集群调度,传统的集中式调度方式计 算负载重,实时性差,急需寻求新的路经规划方法,其中无碰撞运行的路经规划是系统调度 的基本要求,目前国内外的学者都在研究多AGV调度问题,也提出了一些算法,如交通控制 法,基于时间窗的路径规划法,基于遗传的算法在线调度策略。目前多AGV调度的方法仍然 不够成熟,导致AGV的利用率低,AGV的等待时间过长、任务分配不合理导致系统效率低等缺 点。 物联网技术使得参与生产活动的各单元具备了获取、处理、融合与交流生产过程 数据的能力,为多AGV系统调度技术的研究开辟了新的方向。
技术实现要素:
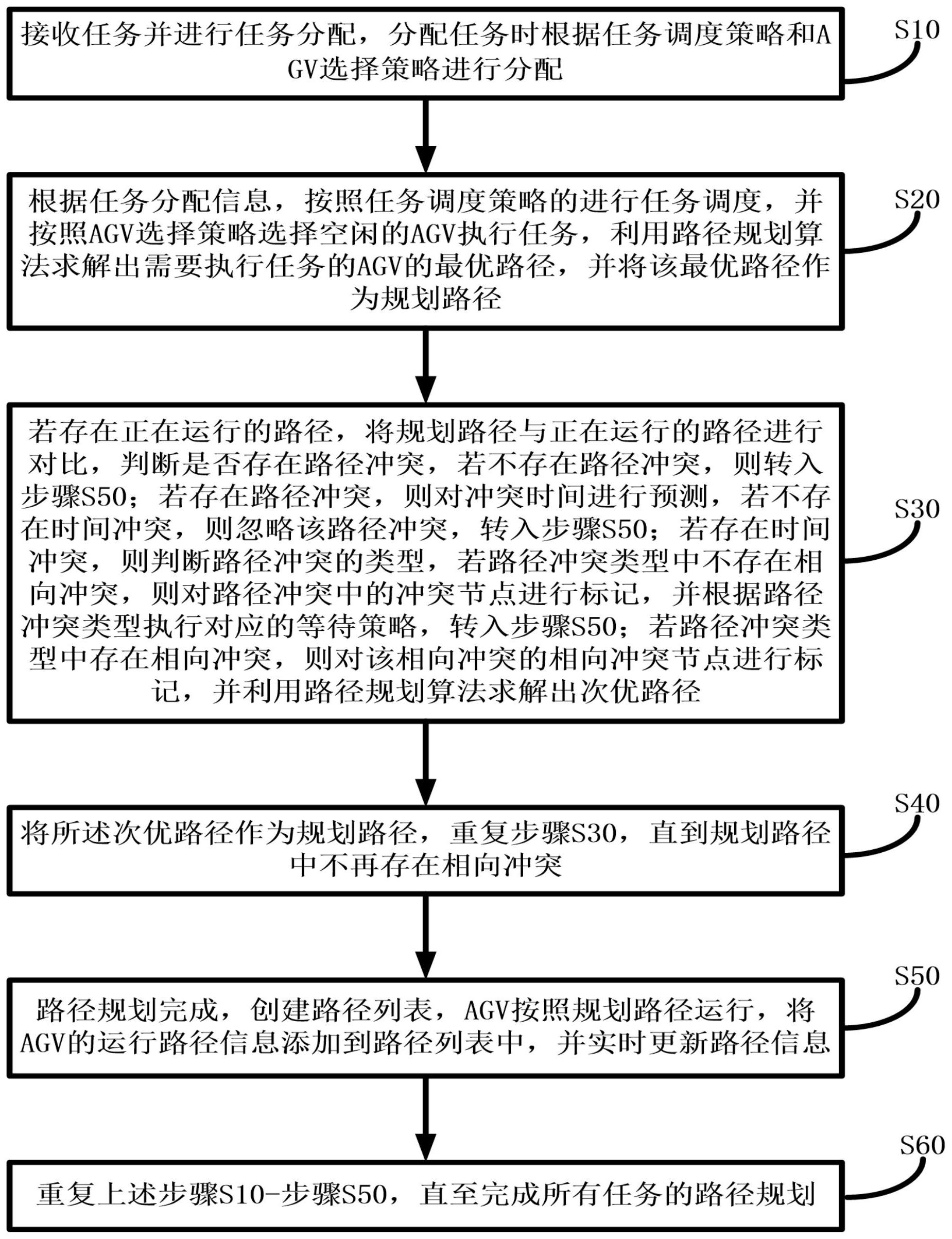
本发明提供一种多AGV无碰撞运行的路经规划方法及调度系统,以解决现有技术 中存在的至少一个问题。 本发明是通过以下技术方案实现的: 一种多AGV无碰撞运行的路经规划方法,所述路经规划方法包括: S10、接收任务并进行任务分配,分配任务时根据任务调度策略和AGV选择策略进 行分配; S20、根据任务分配信息,按照任务调度策略的进行任务调度,并按照AGV选择策略 选择空闲的AGV执行任务,利用路径规划算法求解出需要执行任务的AGV的最优路径,并将 该最优路径作为规划路径; S30、若存在正在运行的路径,将规划路径与正在运行的路径进行对比,判断是否 4 CN 111596658 A 说 明 书 2/6 页 存在路径冲突,若不存在路径冲突,则转入步骤S50; 若存在路径冲突,则对冲突时间进行预测,若不存在时间冲突,则忽略该路径冲 突,转入步骤S50;若存在时间冲突,则判断路径冲突的类型,若路径冲突类型中不存在相向 冲突,则对路径冲突中的冲突节点进行标记,并根据路径冲突类型执行对应的等待策略,转 入步骤S50;若路径冲突类型中存在相向冲突,则对该相向冲突的相向冲突节点进行标记, 并利用路径规划算法求解出次优路径; S40、将所述次优路径作为规划路径,重复步骤S30,直到规划路径中不再存在相向 冲突; S50、路径规划完成,创建路径列表,AGV按照规划路径运行,将AGV的运行路径信息 添加到路径列表中,并实时更新路径信息; S60、重复上述步骤S10-步骤S50,直至完成所有任务的路径规划。 具体地,所述步骤S10中,所述任务调度策略包括:对任务进行优先级分配,建立任 务列表,根据任务优先级的高低顺序进行排列,形成任务等待队列,若任务优先级相同,则 根据任务的发布先后顺序进行排列,在任务调度时,根据任务列表的排列顺序依次调度。 具体地,所述步骤S10中,所述AGV选择策略包括:历遍所有空闲AGV,根据AGV当前 位置点和任务转载点,利用路径规划算法求解出各空闲AGV的最优路径,通过对比各个空闲 AGV的最优路径,选择运行距离最短的空闲AGV作为最优的AGV执行任务。 优选地,所述步骤S30中,所述路径冲突类型包括追击冲突、节点冲突和相向冲突; 所述路径冲突类型对应的等待策略为: 若为追击冲突,后运行的AGV停止运行,待先运行的AGV运行到安全距离后再运行; 若为节点冲突,则对AGV进行优先级分配,在将要发生节点冲突时,判断各AGV的优 先级,优先级低的AGV停止运行,待优先级高的AGV优先通过冲突节点后再运行优先级低的 AGV。 本发明还提供了一种多AGV调度系统,所述调度系统包括调度控制装置和两辆以 上的AGV,所述AGV包括有主控制器,与该主控制器连接的导航模块,RFID传感器、红外避障 模块、电量检测模块、物联网通信模块、电机驱动模块以及电源模块; 所述调度控制装置设置有物联网模块及物联网通信模块,物联网通信模块通过物 联网模块与调度控制装置连接,所述调度控制装置通过物联网通信模块与各AGV进行通信, 并利用上述的路径规划方法对各AGV的进行调度控制。 本发明提供的一种多AGV无碰撞运行的路经规划方法及调度系统,其采用基于优 先级的任务调度策略进行调度,可以合理地分配任务,有效提高调度系统的效率,同时采用 基于优先级的AGV选择策略,通过物联网技术实现多AGV互联,并通过A*算法求出各AGV的最 优路径,从而使得运行路径相对畅通,有效减少AGV等待时间,从而提高整个系统运行效率。 本发明提供的基于物联网的多AGV无碰撞运行的路经规划方法及调度系统,能够广泛运用 于制造业生产工厂,替代传统的人工搬运和传送带运输,加速工厂的智能化改造,减低劳动 成本大大提高生产效率。 附图说明 附图1为本发明实施例1的路经规划方法流程示意图; 5 CN 111596658 A 说 明 书 3/6 页 附图2为本发明实施例2的调度系统的结构示意框图。











