
技术摘要:
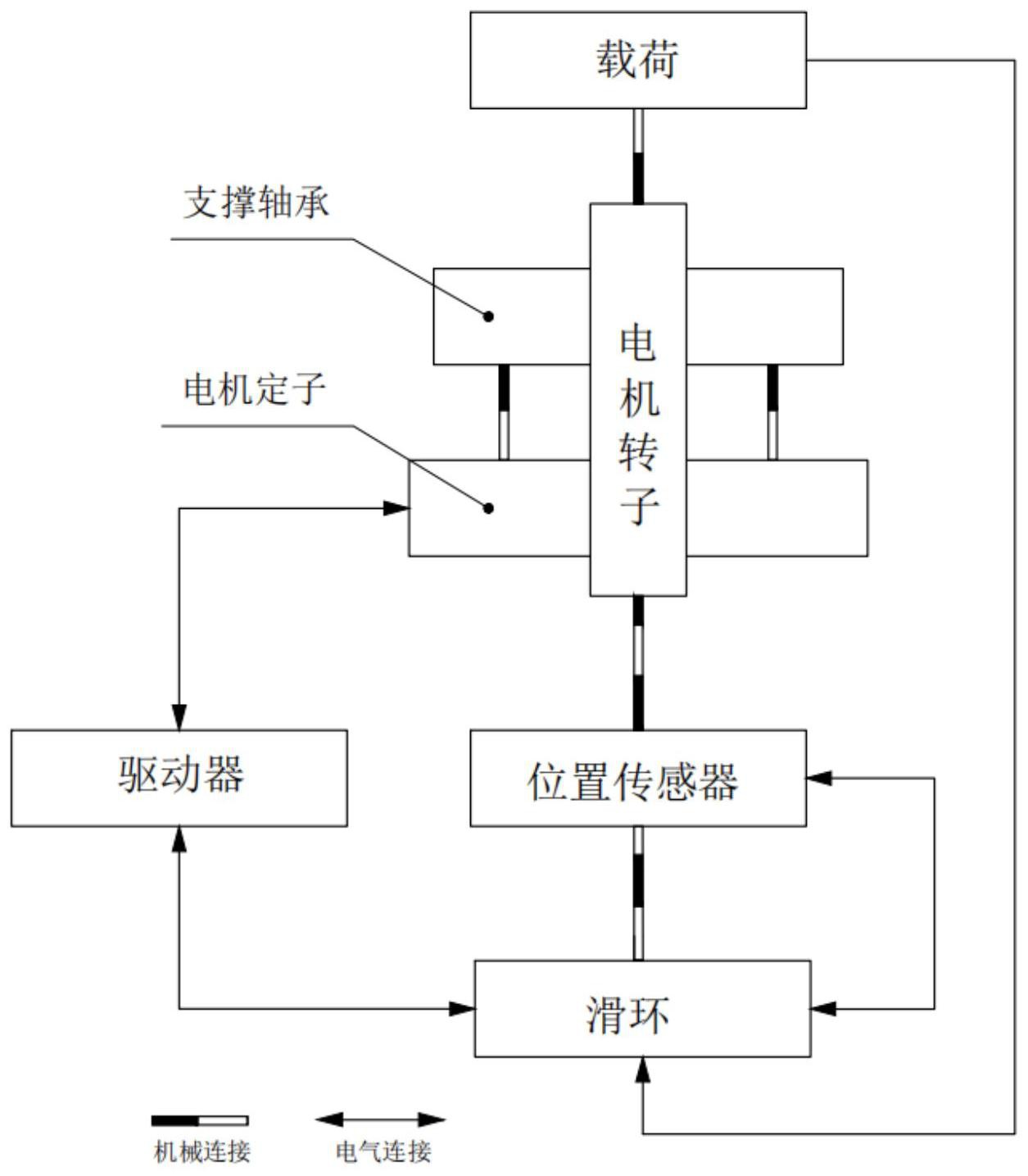
本发明涉及一种自驱式座圈,包括电机、驱动器、位置传感器、滑环、支撑轴承、载荷;电机由定子和转子两部分组成,其中定子与支撑轴承外圈、滑环定子相连,然后一起固定到车体上,定子绕组与驱动器相连;转子与支撑轴承内圈相连,并分为传感器端和输出端,其中转子传感 全部
背景技术:
目前,国内外传统炮塔以及武器站的座圈机械结构常采用“驱动电机 齿轮减速 器”的级联驱动方案。不管是电液式还是全电式炮控系统,为了提高炮塔的响应速度,动力 部件通常采用高速电机,这就需要增加多级减速器来放大输出转矩来带到载荷运动。众所 周知,采用多级齿轮减速会使得座圈传动精度降低、振动与噪声增加等问题,而且齿轮传动 装置中不可避免地存在传动间隙、齿轮弹性形变和磨损问题,并且采用此方案会增加系统 制造工艺难度和装配难度,也会进一步提高座圈的后续使用维护成本。同时上述传动链中 的非线性环节对炮控系统的稳定性、低速性能和稳定精度会产生重大影响,这就制约了炮 塔以及武器站火控系统性能的发挥,进而降低了战场生存率。
技术实现要素:
为了克服现有的座圈的不足,本发明提供一种自驱式座圈方案,其特征在于包括 电机、驱动器、位置传感器、滑环、支撑轴承、载荷;所述电机由定子和转子两部分组成,其中 所述定子与所述支撑轴承外圈、所述滑环定子相连,然后一起固定到车体上,所述定子绕组 与所述驱动器相连;所述转子与所述支撑轴承内圈相连,并分为传感器端和输出端,其中所 述转子传感器端与所述位置传感器转子相连,所述转子输出端与所述载荷相连;所述滑环 定子与所述位置传感器外壳相连,所述滑环转子与所述位置传感器转子相连,所述滑环转 子电气部分分别与所述位置传感器和所述载荷的电气部分相连,所述滑环定子电气部分与 所述驱动器相连。 所述电机由定子和转子两部分组成,其特征是所述电机定子与所述支撑轴承外 圈、所述电滑环定子相连,然后通过支撑轴承连接件一起固定到车体上,所述电机定子绕组 与所述驱动器相连,所述电机转子与所述支撑轴承内圈及座圈法兰相连,并分为传感器端 和输出端。 所述位置传感器包括定子和转子两部分,所述位置传感器转子与所述电机转子传 感器端相连,其特征是所述位置传感器转子输出端与所述载荷相连;所述位置传感器定子 与所述滑环定子相连。通过电机转子的运动带动位置传感器转子运动来检测座圈的位置和 速度。 所述滑环主要由定子和转子两部分组成,所述滑环转子与所述位置传感器转子相 连,其特征是所述滑环转子电气部分分别与所述位置传感器和所述载荷的电气部分相连, 所述滑环定子电气部分与所述驱动器相连。所述滑环转子部分跟随所述位置传感器转子部 分运动,将位置传感器测量的信号通过电气部分传送出去。 本发明的有益效果是,该座圈采用更加简洁的系统结构,采用直驱电机方案替代 “驱动电机 齿轮减速器”结构方案,提高了系统精度和效率,消除了传动间隙、振动、噪声、 3 CN 111585397 A 说 明 书 2/3 页 磨损等,同时也极大地降低了制造工艺、装配难度,且提高了后续使用维护性。也进一步提 升了炮塔以及武器站火控系统性能,提高了战场生存率。 附图说明 下面结合附图和实施例对本发明进一步说明。 图1是自驱式座圈组成框图。 图2是自驱式座圈剖视图。 图2中1、座圈法兰;2、角度编码器联轴器;3、轴承挡圈Ⅰ;4、大直径交叉滚子轴承连 接件;5、大直径交叉滚子轴承;6、永磁同步电动机定子;7、滑环安装件;8、永磁同步电动机 转子;9、角度编码器;10、电滑环;11、角度编码器安装件;12、轴承挡圈Ⅱ;13、紧固件。











