
技术摘要:
本发明公开了一种升降式输液架及自动跟随方法,包括底座,底座下方设有万向轮和动力轮,动力轮连接有电机,底座上方连接有伸缩杆,伸缩杆的顶部连接有挂钩,伸缩杆上转动套设有套筒,套筒通过铰链连接有摇杆,套筒外壁上还设置有第一角度传感器,用于检测摇杆相对于套 全部
背景技术:
目前输液是医院较为常规的治疗手段,普通输液的时间基本都需要2、3个小时,重 患甚至需要更长的时间,由于输液通常是在病房、急诊室等地方进行,输液地点都比较固 定,使得输液期间输液病人的行动受到极大的约束。移动式输液架的出现,给输液病人带来 了方便,利用移动式输液架,输液病人可以在医院内适当的活动,如在走廊里面走动、上厕 所以及做检查等。然而,现有的移动式输液架,需要有人或医护人员推动才能移动,使用起 来非常不便,还需要专门的人推着移动式输液架跟着病人走,既麻烦,又浪费人力资源。
技术实现要素:
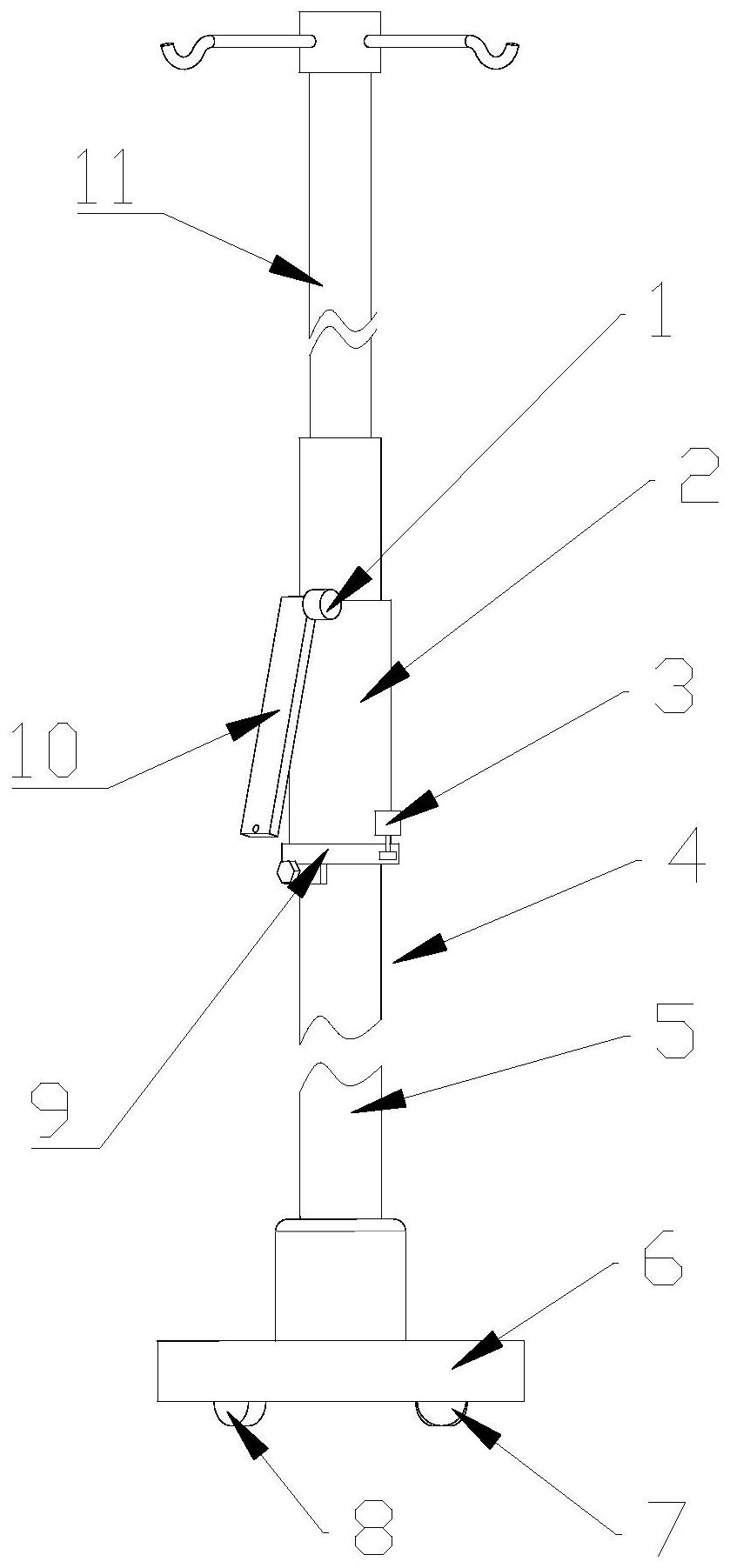
为了解决上述现有技术中存在的问题,提供了一种升降式输液架及自动跟随方 法。 本发明解决其技术问题所采用的技术方案是: 本发明提出了一种升降式输液架,包括底座,所述底座下方设有两个万向轮和两 个动力轮,所述每个动力轮各连接有一电机,所述底座上方连接有伸缩杆,所述伸缩杆的顶 部连接有挂钩,其特征在于,所述伸缩杆上转动套设有套筒,所述套筒通过铰链连接有摇 杆,所述套筒外壁上还设置有第一角度传感器,用于检测摇杆相对于套筒的转动角度;所述 套筒外壁上还设置有第二角度传感器,用于检测套筒相对于伸缩杆的转动角度;还包括与 所述第一角度传感器、第二角度传感器相连接的控制器,所述控制器设置在所述底座上,第 一角度传感器和第二角度传感器测得的转动角位移数据传递给控制器,所述控制器还与所 述电机相连,控制动力轮转动;所述控制器还与所述伸缩杆相连,用于控制伸缩杆的伸缩。 优选的,所述摇杆上开设有接线孔,所述接线孔内连接有丝线。 本发明还提出了一种升降式输液架的自动跟随方法,包括以下步骤: S1:在初始状态时,摇杆靠自身重力,与套筒之间的夹角为零,在控制器中预设一 个转动角度值α;在使用时,将丝线的另一端系在病人的手上,当病人移动时,丝线逐渐拉紧 并对摇杆产生拉力,摇杆带动铰链的轴旋转,摇杆与套筒之间的夹角变大,第一角度传感器 测量得到摇杆相对于套筒之间的转动角度数据,记为β,并传递给控制器; S2:控制器接收到转动角数据β,并与预先设定的转动角度值α进行比较;若β≤α 时,则装置不动;若β>α,两个动力轮向前运动,随着装置的移动,β数值会减小,直至第一角 度传感器测得的数值β等于α时,装置停止运动;病人继续移动,β数值会继续增大且大于α, 装置会再次移动,不断重复此过程; S3:当病人转弯或产生偏移时,丝线拉力的方向随之变化,丝线通过摇杆带动套筒 产生旋转,第二角度传感器测得套筒相对于伸缩杆的转动角度,记为m,并将数据传递给控 制器; 3 CN 111603633 A 说 明 书 2/4 页 S4:控制器接收到数据m,并通过控制各个电机的转速实现输液架的转向,进而实 现自动跟随。 优选的,步骤S4中,控制输液架转向的方法包括: 输液架静止时的输液架原地转向,控制器控制两个电机的转速,使两个动力轮的 转速的大小相同,方向相反,直至第二角度传感器测得的角位移为零时,停止转动; 输液架向前运动的过程中的转向,控制器控制输液架待转向侧的另一侧的电机转 速增加,使动力轮速度增加,两侧的动力轮转速不一致差生偏转,直至第二角度传感器测得 的角位移为零时,控制器控制电机的转速回复相同,两动力轮的速度恢复为相同值。 与现有技术相比,本发明的有益效果是: 通过设置丝线,当病人向着远离输液架的方向移动时,系在病人的手上的丝线会 拉紧,使摇杆与套筒之间的夹角变大,控制器通过与预设值比较大小,控制输液架静止或向 着病人方向运动,使病人与摇杆之间的距离减小;当病人的运动方向改变时,由于套筒与输 液架之间可以相对转动,丝线可以拉动套筒旋转,控制器根据第二角度传感器测量的数据 会控制两个电机转速产生变化,使输液架向着套筒的转动的方向转动,使输液架的运动的 方向始终跟随着病人的运动方向,实现了自动跟随的目的,使用方便,可靠性高。 附图说明 本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得 明显和容易理解,其中: 图1是本发明升降式自动跟随输液架的立体图; 图2是本发明升降式自动跟随输液架的另一角度结构示意图; 图3是本发明升降式自动跟随输液架的套筒部分的结构示意图; 图4是本发明升降式自动跟随输液架的底座的结构示意图; 图5是本发明升降式自动跟随输液架的底座的仰视图。 附图标记说明: 第一角度传感器1;套筒2;第二角度传感器3;伸缩杆4;外杆5;底座6;万向轮7;动 力轮8;第一齿轮9;摇杆10;内杆11;第二齿轮12;固定片13;紧定螺钉14;接线孔15;铰链16。











