
技术摘要:
本发明公开了一种仿生柔顺机械手,包括仿生手掌以及设置在仿生手掌上的五个仿生手指,五个仿生手指均包括依次远离仿生手掌的第一指节、第二指节以及第三指节,第一指节与第二指节之间通过第一连接件连接,第二指节与第三指节之间通过第二连接件连接,第一连接件与第二 全部
背景技术:
目前,人们对仿生机械手的开发和研究已取得较大成就,其能满足娱乐、学习、开 发等需要。现有的仿生机械手主要分为刚性机械手和柔性机械手两大类,刚性机械手对于 位置控制精度的要求高,自适应能力差,若控制精度不够,则会对抓取物体造成较大的损 伤;而柔性机械手多数采用气压驱动,体积较大、携带不便且容易漏气。另外,现有的机械手 除拇指外,其余手指无法完成侧摆动作,大大降低抓取物体的范围。 为此,如何提供一种刚柔结合且抓取范围大的机械手,是本领域技术人员亟待解 决的技术问题。
技术实现要素:
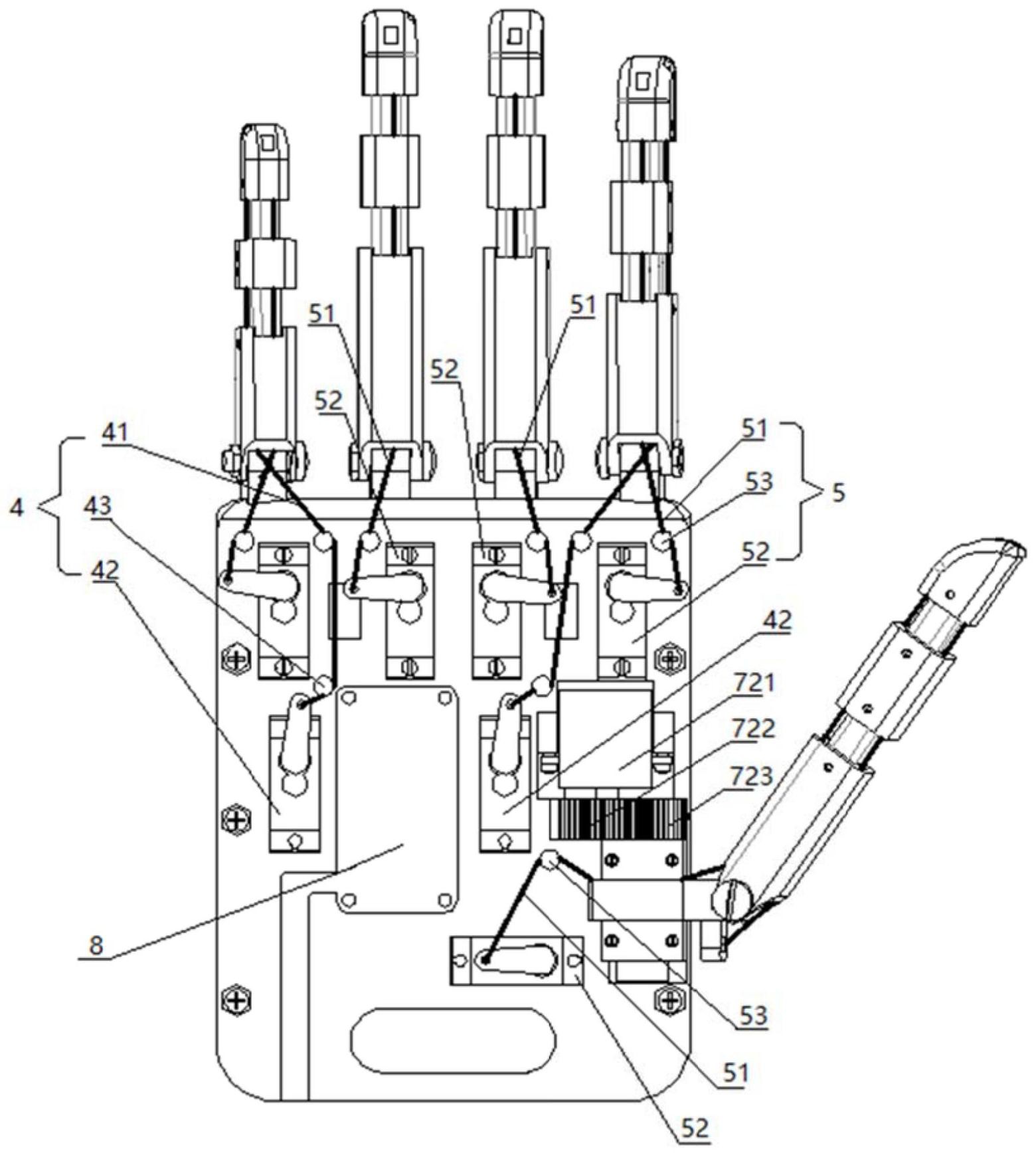
为了克服上述现有技术所述的缺陷,本发明提供一种仿生柔顺机械手。 本发明为解决其问题所采用的技术方案是: 本发明第一方面提供一种仿生柔顺机械手,包括仿生手掌以及设置在所述仿生手 掌上的五个仿生手指,五个所述仿生手指分别为仿生拇指、仿生食指、仿生中指、仿生无名 指以及仿生小指,其中: 五个所述仿生手指均包括依次远离所述仿生手掌的第一指节、第二指节以及第三 指节,所述第一指节与第二指节之间通过第一连接件连接,所述第二指节与第三指节之间 通过第二连接件连接,所述第一连接件与第二连接件均采用硅胶材质制成; 所述仿生手掌和所述仿生手指的第一指节、第二指节和第三指节均采用树脂材料 制成。 由此,该仿生手指上设有由硅胶材质制成的第一连接件和第二连接件,使得仿生 手指具有无限自由度,活动范围更大。通过设置第一指节、第二指节和第三指节模拟人手的 指骨,起到刚性连接的作用。本发明的仿生柔顺机械手,采用刚柔结合的设计理念,使机械 手具有一定柔顺性的同时还兼备一定的强度,进而降低了对抓取物品的损害,同时也降低 了控制难度。 进一步地,还包括分别带动所述仿生食指和仿生小指侧摆的两个第一传动机构, 其中: 所述第一传动机构包括设置在所述仿生手指内部旁侧的第一腱绳以及牵引所述 第一腱绳转动的第一驱动装置; 所述第一腱绳的一端与所述仿生手指的末端连接,另一端与所述第一驱动装置的 活动端连接。 由此,当第一驱动装置驱动第一腱绳转动时,可带动仿生手指做侧摆运动。 进一步地,所述第一驱动装置为舵机,所述舵机上设有转臂;所述第一腱绳与所述 3 CN 111604934 A 说 明 书 2/5 页 舵机上的转臂连接。 进一步地,所述第一传动机构还包括第一绕线桩,所述第一腱绳缠绕所述第一绕 线桩。 由此,通过设置第一绕线桩,可以让第一腱绳的排布走向更加合理,从而节省安装 空间。 进一步地,还包括分别带动五个所述仿生手指弯曲的五个第二传动机构,其中: 所述第二传动机构包括设置在所述仿生手指内部中间的第二腱绳以及牵引所述 第二腱绳转动的第二驱动装置; 所述第二腱绳的一端与所述仿生手指的末端连接,另一端与所述第二驱动装置的 活动端连接。 由此,当第二驱动装置驱动第二腱绳转动时,可带动仿生手指做弯曲运动。 进一步地,所述第二驱动装置为舵机,所述舵机上设有转臂;所述第二腱绳与所述 舵机上的转臂连接。 进一步地,所述第二传动机构还包括第二绕线桩,所述第二腱绳缠绕所述第二绕 线桩。 由此,通过设置第二绕线桩,可以让第二腱绳的排布走向更加合理,从而节省安装 空间。 进一步地,还包括分别带动五个所述仿生手指复位的五个复位机构,所述复位机 构包括设置在所述仿生手指内部的弹力绳以及第三绕线桩,所述弹力绳的一端与所述仿生 手指的末端连接,另一端与所述第三绕线桩连接。 由此,当仿生手指弯曲时,会拉动弹力绳,当仿生手指恢复时,弹力绳将通过自身 的弹力将仿生手指拉伸到初始位置,从而达到柔顺弯曲及快速复位的作用。 进一步地,还包括带动所述仿生拇指侧摆的第三传动机构,其中: 所述第三传动机构包括连接所述仿生拇指的第三连接件以及驱动所述第三连接 件转动的齿轮传动装置。 由此,齿轮传动装置驱动第三连接件转动,进而带动仿生拇指做侧摆运动,从而增 大抓取范围。 进一步地,所述第三指节呈圆弧结构。 与现有技术相比,本发明的一种仿生柔顺机械手,具有以下有益效果: (1)本发明的仿生柔顺机械手,该仿生手指上设有由硅胶材质制成的第一连接件 和第二连接件,使得仿生手指具有无限自由度,活动范围更大。通过设置第一指节、第二指 节和第三指节模拟人手的指骨,起到刚性连接的作用。因此,该仿生柔顺机械手采用刚柔结 合的设计理念,使机械手具有一定柔顺性的同时还兼备一定的强度,进而降低了对抓取物 品的损害,同时也降低了控制难度。 (2)本发明的仿生柔顺机械手,通过设置第一传动机构和第二传动机构,使仿生手 指同时具备弯曲和侧摆功能,从而增大该机械手的抓取范围。 (3)本发明的仿生柔顺机械手,通过设置复位机构,当仿生手指弯曲时,会拉动弹 力绳;当仿生手指恢复时,弹力绳将通过自身的弹力将仿生手指拉伸到初始位置,从而达到 柔顺弯曲及快速复位的作用。 4 CN 111604934 A 说 明 书 3/5 页 附图说明 图1为本发明一种仿生柔顺机械手的正面示意图; 图2为本发明一种仿生柔顺机械手的内部示意图; 图3为本发明一种仿生柔顺机械手的背面示意图; 图4为本发明仿生食指的结构示意图; 图5为本发明第三传动机构的部分结构示意图。 其中,附图标记含义如下: 1、仿生手掌;11、手掌盖;12、手掌壳;21、仿生拇指;211、第一指节;2111、粘黏剂灌 注孔;212、第二指节;213、第三指节;221、第一连接件;222、第二连接件;22、仿生食指;23、 仿生中指;24、仿生无名指;25、仿生小指;3、手指连接件;4、第一传动机构;41、第一腱绳; 42、第一驱动装置;43、第一绕线桩;5、第二传动机构;51、第二腱绳;52、第二驱动装置;53、 第二绕线桩;6、复位机构;61、弹力绳;62、第三绕线桩;7、第三传动机构;71、第三连接件; 721、电机;722、第一齿轮;723、第二齿轮;724、连杆;8、单片机控制板。











