
技术摘要:
一种单机吊装与抬吊吊装装置,其特征是(1)装设检测吊钩偏角装置:将起重机定滑轮组件a1经联接件a3吊挂于吊臂b1的吊耳b2上,所述联接件a3一端用绞接轴a2同所述定滑轮组件a1联接,并将绞接轴a2设在与定滑轮轴线相垂直方位,所述联接件a3另一端经卸扣a5吊挂于所述吊臂b1 全部
背景技术:
据SH/3515-2003 大型设备吊装工程施工工艺标准9.1 .4 吊车吊装工艺应符合 “吊装过程中,吊钩偏角应小于3º”,据最新的SH/T3515-2017 石油化工大型设备吊装工程 施工技术规程11.1.4 规定“吊装过程中,吊钩偏角应小于1º” 起重机具有起升、回转、变幅 以及吊臂伸缩、行走等一系列功能,依据规程规定吊装过程中均应在吊钩偏角小于允许值 下进行。据查西方1883 年出现起重机,已发展有可越野上高速路千屯级起重机,可是作为 吊装工艺装备的起重机在吊装方面发展则相对迟缓,迄今起重机司机无法知道吊装中起重 机滑轮组(图1所示)是否处于垂直状态,尤其是大型吊装中,要由吊装指挥人员的肉眼及多 年经验来把握,并经起重机司机调整滑轮组的垂直状态完成吊装作业。
技术实现要素:
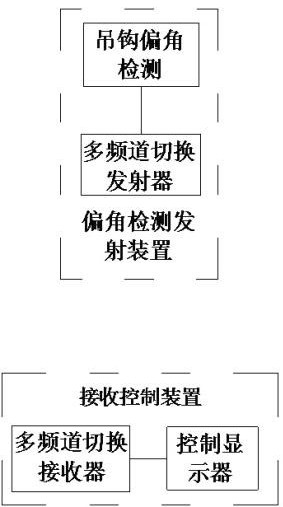
本发明的目的是提供一种用于单机吊装与抬吊吊装装置,另一目的是提供一种包 括上述单机吊装与抬吊吊装装置的流动式起重机。 单机吊装与抬吊都是流动式或工程起重机吊装基本作业,且受力明确的吊装独立 吊点数只能≤ 3,因而抬吊一般是双机或三机抬吊,依据吊装数学模型(林汉丁. 起重吊装 受力控制的数学模型[J], 南京建筑工程学院学报,1996(4)72-77)抬吊的危险一是来自对 吊装中吊钩偏角未进行监控,二是来自起重机载荷超常(超吊装设计值)变动,当双机抬吊 的二吊点位置确定之后,吊装中二吊点载荷超常变动,只来自二吊点连线斜率偏离设计值, 故可比较抬吊起重机间吊重载荷操纵起重机,实现抬吊双机吊重载荷的正常分配,因而增 设吊钩偏角、吊重载荷检测传输装置,以克服单机吊装与抬吊吊装的危险,对于单机吊装与 受力明确的双机或三机抬吊,具有普遍的适用性。 当控制起重机间吊重载荷变动或起重机间吊钩偏角变动,双机抬吊时起重机间互 为协同方; 当控制主、辅机间吊钩偏角变动时,主机与辅机间互为协同方。 主、辅机间产生的吊钩偏角大小,约与主、辅机各自承担的吊重载荷成反比,故主、 辅机均应以辅机显示的吊钩偏角不大于允许值以操纵起重机吊装。由于主、辅机吊装时,辅 机是由主机承担全部吊重下脱钩,因而只需对主、辅机吊装中的吊钩偏角进行监控,而无需 监控吊装中吊重载荷的变动。 目前大型吊装或抬吊时要由吊装指挥者,依据监视被吊重物所处姿态变化者提供 的信息,指挥起重机司机操纵,由于设专人监视既不及时又不准确,故对于流动式起重机吊 装,有效的办法是增设实时显示吊钩偏角装置,以监控起重机吊装中吊钩偏角,对于需控制 吊重载荷分配的起重机,比较主机间吊重载荷操纵起重机实现吊重载荷正常分配。 一种单机吊装与抬吊吊装装置(图2、图3所示),其特点是, 3 CN 111573504 A 说 明 书 2/5 页 (1) 装设检测吊钩偏角装置: (图4、图6所示)将起重机定滑轮组件a1 经联接件a3吊挂于吊臂b1 的吊耳b2 上,所述 联接件a3 一端用绞接轴a2 同所述定滑轮组件a1 联接,并将绞接轴a2 设在与定滑轮轴线 相垂直方位,所述联接件a3 另一端经卸扣a5 吊挂于所述吊臂b1 的吊耳b2 上;在所述联 接件a3 上固定装设与滑轮组力作用线垂直的平台面a6,在所述平台面a6装设角度测量仪 a7,所检测实时沿X、Y轴向分量合成后等于实时吊钩偏角; 需要说明,所述经联接件a3吊挂于吊臂b1 的吊耳b2 上,是在现有起重机吊臂或称起 重臂、臂架等固定定滑轮处设吊耳,将起重机定滑轮组件经所限定的联接件吊挂于所设吊 耳上。 (2)装设吊钩偏角无线传输装置:在起重机所述联接件a3或所述定滑轮护板上,装 设一套二频道遥控切换的、遥控开关设于起重机操作室的将所测吊钩偏角信号无线发射的 装置及在起重机操作室配套装设二套二频道切换的接收显示吊钩偏角的接收控制装置; 频道切换以显示协同抬吊双方实时吊钩偏角:当起重机选作抬吊时,每台起重机分别 通过设于起重机操作室的遥控开关启用吊钩偏角无线发射装置,分别各占用一个频道;设 于起重机操作室的接收控制装置分别各除一套切换至本机频道,将本机实时吊钩偏角显示 于本机操作室外,同时将接收协同方的吊钩偏角接收控制装置切换至协同方起重机频道, 分别将协同方实时吊钩偏角再显示于本机操作室。 (3)装设吊重载荷检测器:在起重机上装设吊重载荷检测器; (4)装设吊重载荷无线传输装置:装设一套二频道遥控切换的、遥控开关设于起重机操 作室的将所测吊重载荷信号无线发射的装置及在起重机操作室配套装设一套二频道切换 的,本机载荷接收控制装置与一套二频道切换的协同方载荷接收控制装置; 频道切换以显示抬吊双方实时吊重载荷:当起重机选作抬吊时,每台起重机分别通过 设于起重机操作室的遥控开关启用吊重载荷无线发射装置,分别各占用一个频道;设于起 重机操作室的接收控制装置分别各除一套切换至本机频道,将实时吊重载荷显示于本机操 作室外,同时将接收协同方的载荷接收控制装置切换至协同方起重机频道,分别将实时吊 重载荷再显示于本机操作室。 所述的单机吊装与抬吊吊装装置,其特点是,单机吊装时,通过设于起重机操作室 的遥控开关启用所述单机吊钩偏角无线发射装置占用一个频道,同时只启用接收所述单机 频道的吊钩偏角接收控制装置;或者通过总线传输将实时吊钩偏角显示于所述单机操作 室。 所述的单机吊装与抬吊吊装装置,其特点是,依据所述的单机实时吊钩偏角,对被 吊物对中垂直起吊,并监控所述的单机吊装中吊钩偏角不超过允许值。 所述的单机吊装与抬吊吊装装置,其特点是,可选在所述联接件a3或所述定滑轮 护板上,装设一套三频道遥控切换的、遥控开关设于起重机操作室的将所测吊钩偏角信号 无线发射装置及在起重机操作室配套装设三套三频道切换的接收显示吊钩偏角的接收控 制装置; 所述的单机吊装与抬吊吊装装置,其特点是,可选在起重机上,装设一套三频道遥控切 换的、遥控开关设于起重机操作室的将所测吊重载荷信号无线发射装置及在起重机操作室 配套装设三套三频道切换的接收显示吊重载荷的接收控制装置; 4 CN 111573504 A 说 明 书 3/5 页 所述的单机吊装与抬吊吊装装置,其特点是, ① 双主机抬吊,依据所述的主机实时吊钩偏角,对被吊物对中垂直起吊,并监控所述 的单机吊装中吊钩偏角不超过允许值;同时比较主机间吊重载荷操纵起重机实现载荷正常 分配。 ②主、辅机双机抬吊,主、辅机均应以辅机显示的吊钩偏角不大于允许值以操纵起 重机吊装。 以下对作为方案核心的内容进行分析:图4、图6 所示,将起重机定滑轮组件a1 经 联接件a3 吊挂于吊臂b1 的吊耳b2 上,所述联接件a3 一端用绞接轴a2 同所述定滑轮组 件a1 联接,并将绞接轴a2设在与定滑轮轴线相垂直方位,所述联接件a3 另一端经卸扣a5 吊挂于所述吊臂的吊耳b2上;因而当作用于定滑轮轴线上的滑轮组力作用点偏角时,在所 述滑轮组吊重张力作用下,所述定滑轮组件a1 沿所述绞接轴a2 而自行调整,此时定滑轮 轴线微量倾斜,由于所述滑轮组力作用线通过所述联接件a3,当在所述联接件a3 上固定装 设与所述滑轮组力作用线垂直于平台面a6 的平台,则吊重时所述滑轮组力作用线始终垂 直于所述的平台面a6。 由于吊重时所述滑轮组力作用线始终垂直于所述的平台面,当在所述联接件的所 述平台面上固定装设角度测量仪,所检测与滑轮组力作用线垂直平台面同水平面间夹角, 数值上等于所述滑轮组力作用线偏离铅垂线角度的实时吊钩偏角。 图7所示,设通过所述滑轮组力作用线m 上b 点与通过b 点铅垂线n 的相交角为 ∠b ,与滑轮组力作用线m 垂直的平台面W(即图4 中a6)同Z 水平面夹角为∠a , 由二面 角内b 点,向W、Z 二平面作的垂线的垂足分别为C、D,过C 点在面内作Ca 垂直于W 平面与Z 平面交线L 的a 点,连结Da ∵L⊥Ca,L⊥bC, ∴ L⊥面bCa,∴ L⊥ba , 又∵L⊥bD,∴L⊥面bDa,∴L⊥Da, ∴∠CaD 为二面角的平面角, 四边形aCbD 与m,n 直线共面,且∠C=∠D=90º 故∠a(与∠CbD 互补而)等于m 直线与n 直线相交的锐角∠b。 上述表明:实时所述滑轮组力作用线偏离铅垂线的角度,等于实时与所述滑轮组 力作用线垂直平台面同水平面间夹角,实时所述滑轮组力作用线偏离铅垂线的方位垂直于 所述平台面与水平面交线,且所述实时滑轮组力作用线偏离铅垂线的角度,同所述实时与 滑轮组力作用线垂直平台面同水平面间夹角位于同一平面上。 因而可在所述平台面a6 装设角度测量仪检测所述滑轮组力作用线偏离铅垂线 角度的实时吊钩偏角。 所述单机吊装与抬吊吊装装置及流动式起重机有益效果是: 由于组合的技术特征产生协同效应,因而可显示精确的吊钩偏角,并可选择经包括总 线的有线或无线传输以监控所述的单机实时吊钩偏角,另一优势可实现协同抬吊,尤其是 在对于装备先进操控灵活的流动式起重机上实现吊钩偏角的精确检测,可为所述流动式起 重机增添吊钩偏角监控功能以及协同抬吊功能。 附图说明 图1一种滑轮组结构示意图; 图1 中标号:A5 吊臂 、A1 定滑轮、 A2 动滑轮、 A3 钢丝绳、 A4 吊钩; 5 CN 111573504 A 说 明 书 4/5 页 图2吊钩偏角协同方显示框图; 图3 吊重载荷协同方显示框图; 图4显示吊钩偏角结构说明图; 图4 中标号:a1 定滑轮组件、 a2 绞接轴、 a3 联接件、 a4 卸扣1 、 a5 卸扣2 、a6 平台面 、a7 角度测量仪或惯性测量仪; 图5是图4一种实施例的左视剖面构造示意图 图6起重机吊臂的吊耳示意图; 图6中标号:b1 吊臂 b2 吊耳; 图7从滑轮组力作用线检测吊钩偏角说明图。











