
技术摘要:
本发明涉及一种用于交通工具的线控转向系统,其包括方向盘单元、轮子单元和在方向盘单元与轮子单元之间的通信连接,方向盘单元具有用于检测方向盘角度的方向盘角度传感器、用于调整方向盘额定力矩的方向盘致动器和用于控制方向盘致动器的方向盘控制器,轮子单元具有用 全部
背景技术:
在交通工具中、尤其机动车中使用多种机电式的转向系统。在此,除了方向盘与可 转向的轮子之间的机械连接之外,还根据方向盘上的转向力矩通过轮子致动器施加支持力 矩。如果轮子致动器失效,则交通工具还可以通过机械连接转向。转向力矩在此借助扭杆以 扭杆力矩的形式被检测,并且作为用于转向力支持装置的输入值使用,转向力支持装置由 此计算通过轮子致动器施加的支持力矩。 此外还已知多种线控转向装置,其中,交通工具的方向盘与可转向轮之间不再形 成机械连接。线控转向系统包括方向盘单元和轮子单元,方向盘单元和轮子单元借助通信 连接相连。方向盘的测得的转向运动借助轮子致动器、例如电动机传递至轮子。为了即使在 无机械连接的情况下也能实现从轮子至方向盘的触觉反馈并且由此针对驾驶员实现真实 的转向感受,方向盘单元包括方向盘致动器、例如电动机,利用方向盘致动器能够通过施加 相应的力矩来加速或制动方向盘。 由文献DE 199 21 307 A1已知一种转向系统,其带有至少一个轮子致动器和至少 一个方向盘致动器,其中,额定值与调节量之间的调节偏差通过方向盘被继续传导至驾驶 员。由文献DE 100 51 864 A1同样已知一种线控转向系统,线控转向系统将调节偏差通过 方向盘继续传递至驾驶员。
技术实现要素:
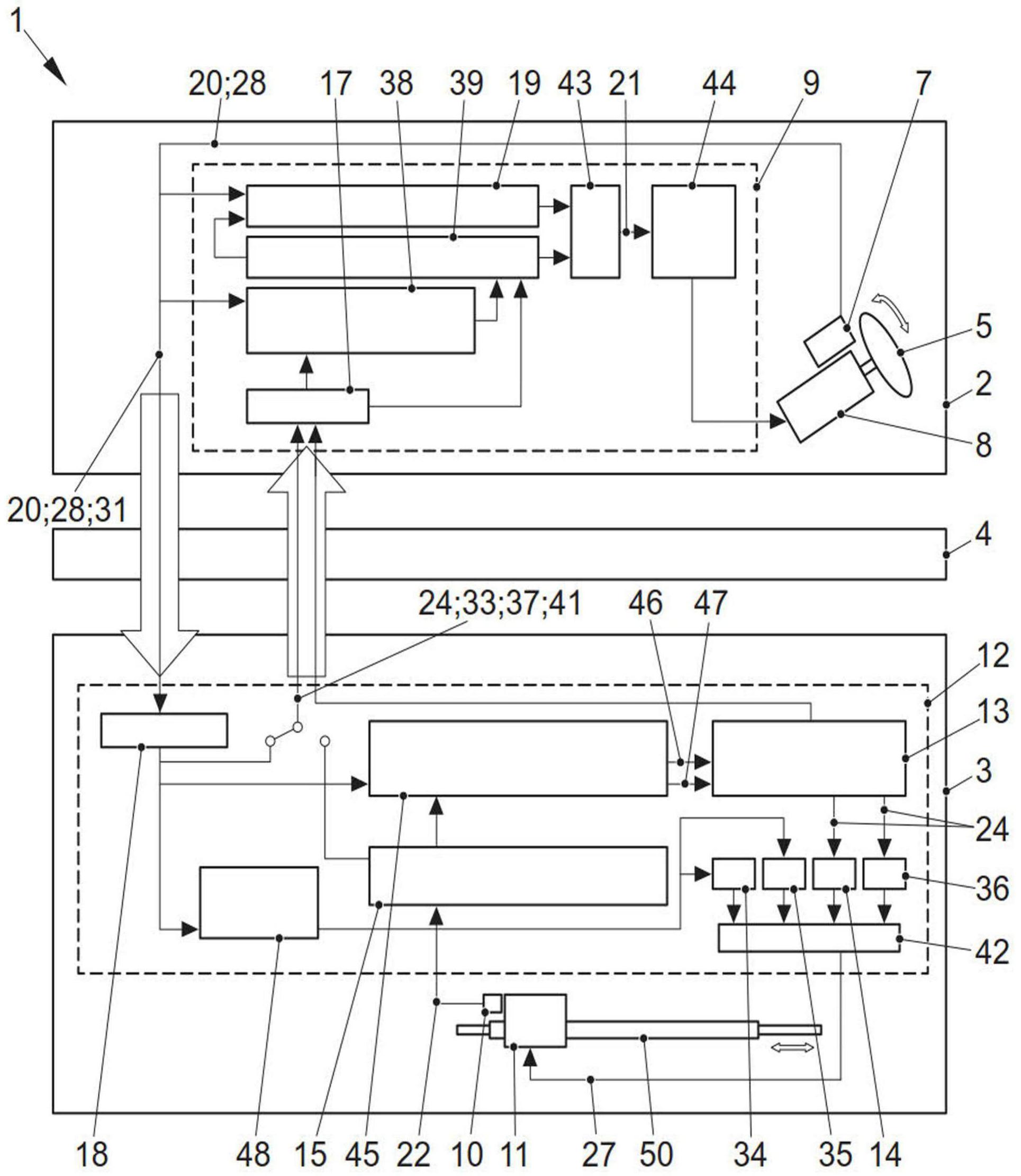
本发明所要解决的技术问题在于,改进线控转向系统和用于运行线控转向系统的 方法。 所述技术问题按照本发明通过一种用于交通工具的线控转向系统解决,所述线控 转向系统包括方向盘单元、轮子单元以及在方向盘单元和轮子单元之间的通信连接,其中, 所述方向盘单元具有用于检测交通工具的方向盘的方向盘角度的方向盘角度传感器、用于 调整方向盘上的方向盘额定力矩的方向盘致动器和用于至少根据方向盘额定力矩控制方 向盘致动器的方向盘控制器,并且其中,所述轮子单元具有用于检测至少一个转向实际量 的转向传感器、至少一个用于调整转向额定量的轮子致动器和用于控制轮子致动器的轮子 控制器,其中,所述轮子控制器还构造为,根据转向额定量和转向实际量来计算虚拟的扭杆 力矩,并且根据计算得出的虚拟的扭杆力矩来控制所述轮子致动器,并且将计算得出的虚 拟的扭杆力矩通过通信连接传递至所述方向盘单元,其中,所述方向盘控制器还构造为,根 据所传递的虚拟的扭杆力矩来计算方向盘额定力矩。 所述技术问题按照本发明还通过一种运行线控转向系统的方法解决,其中,所述 线控转向系统包括方向盘单元、轮子单元以及在方向盘单元与轮子单元之间的通信连接, 其中,所述方向盘单元具有用于检测交通工具的方向盘的方向盘角度的方向盘角度传感 4 CN 111572624 A 说 明 书 2/7 页 器、用于调整方向盘上的方向盘额定力矩的方向盘致动器和用于至少根据方向盘额定力矩 控制方向盘致动器的方向盘控制器,并且其中,所述轮子单元具有用于检测至少一个转向 实际量的转向传感器、至少一个用于调整转向额定量的轮子致动器和用于控制轮子致动器 的轮子控制器,其中,所述方法实施以下步骤:借助所述轮子控制器根据转向额定量和转向 实际量计算出虚拟的扭杆力矩,借助所述轮子控制器根据计算得出的虚拟的扭杆力矩控制 所述轮子致动器,通过通信连接将计算得出的虚拟的扭杆力矩传递至所述方向盘单元,借 助所述方向盘控制器根据传递的虚拟的扭杆力矩计算方向盘额定力矩。 本发明的优点在于,计算和提供虚拟的扭杆力矩。计算得出的虚拟的扭杆力矩随 后用于轮子致动器的控制。这可由经典的机电式转向装置已知且其中所应用的结构能够被 转向力支持装置(基于硬件和/或软件)采纳并继续使用,所述转向力支持装置利用作为输 入值的扭杆力矩工作。由此可以节省研发成本和费用。取代在扭杆上测得的扭杆力矩,转向 力支持装置提供计算得出的、虚拟的扭杆力矩作为输入值。转向力支持装置随后根据虚拟 的扭杆力矩和已知的特征曲线计算出借助轮子致动器施加的电机力矩。 此外,计算得出的虚拟的扭杆力矩还传递至方向盘单元,并且在该处用作计算方 向盘额定力矩的依据。通过虚拟的扭杆力矩的反馈,可以提供转向系统的特别好的触觉反 馈。虚拟的扭杆力矩隐含地存在于转向系统中,并且能够摒弃复杂的物理模型、例如在现有 技术中以齿条观察器的形式使用的物理模型。在经典的机电式转向系统中确定转向感受的 所有信息都包含在虚拟的扭杆力矩中。其不仅涵盖道路颠簸而且还涵盖机械系统摩擦。因 此可以在方向盘上提供非常自然的且令驾驶员舒适并进而特别舒适的触觉反馈。 转向实际量和转向额定量可以例如以实际转向角度和额定转向角度的形式甚至 以齿条实际位置和齿条额定位置的方式应用。在此还可行的是,采取不同表示之间的换算, 例如可以将齿条位置换算为转向角度,并且反之亦然。 尤其规定,测得的当前的方向盘角度和由方向盘角度推导出的方向盘角速度从方 向盘单元经过通信连接传递至轮子单元。由此在轮子单元中计算转向额定量、例如额定转 向角度或额定齿条位置。轮子单元尤其将计算得出的虚拟的扭杆力矩传递至方向盘单元。 线控转向系统的部件、尤其方向盘控制器和/或轮子控制器可以分别单独地或合 并地构造为硬件和软件的组合,例如构造为在微控制器或微致动器上实施的程序代码。 在一种实施方式中规定,所述轮子控制器构造为,根据由方向盘单元通过传递的 方向盘角度设置的额定转向角度与由测得的转向实际量推导出的实际转向角度之间的角 度差来计算虚拟的扭杆力矩。虚拟的扭杆力矩在此与角度差成正比,其中,比例系数与虚拟 的扭杆的刚度相关(在最简单的情况下适用的是:虚拟的扭杆力矩=刚度*角度差)。在此尤 其给定刚度,例如可以在已知的机电式转向系统中使用根据经验确定的刚度的值或扭杆的 值。而且原则上可以由交通工具的驾驶员手动地规定或选择。由此,驾驶员可以例如选择对 刚度的偏好,所述偏好则随后影响转向特性和触觉反馈。这实现了虚拟的扭杆力矩的特别 简单且迅速的计算。在考虑到调节回路稳定工作这一条件下,刚度尤其被选择得尽可能高。 在一种实施方式中规定,所述轮子控制器还构造为,根据由方向盘单元传递的方 向盘角速度与由测得的转向实际量推导出的方向盘角速度之间的角速度差来计算虚拟的 扭杆力矩的阻尼分量。角速度差在此表现为相对速度。阻尼分量相当于在转向系统中出现 的摩擦。在最简单的情况下,阻尼力矩与相对速度成正比(一次比例系数)。取代恒定的比例 5 CN 111572624 A 说 明 书 3/7 页 系数,也可以使用特性曲线,以便考虑非线性的效应。通过对阻尼分量的考虑,可以该进一 步改进触觉反馈。 在一种改进的实施方式中规定,所述轮子控制器还构造为,将计算得出的阻尼分 量和由轮子控制器所使用的方向盘角速度传递至方向盘单元,其中,所述方向盘单元还构 造为,根据传递的阻尼分量和由当前测得的方向盘角度推导出的方向盘角速度和传递的所 采用的方向盘角速度对传递的虚拟的扭杆力矩进行校正。在此尤其规定,在方向盘控制器 中根据当前的方向盘角度更新传递的阻尼分量。由此可以补偿由于传递和计算造成的延 迟。由从轮子单元传递至方向盘单元的所采用的方向盘角速度和在方向盘单元中确定的当 前的方向盘角速度,计算出方向盘角速度的差、也即相对角速度。如上所述,通过方向盘角 速度的差或者说相对角速度,在方向盘单元中计算出阻尼分量。传递的阻尼分量和在方向 盘单元中计算得出的阻尼分量可以相比较,以便随后提供阻尼力矩的更新的阻尼分量。更 新的阻尼分量随后被用于虚拟的扭杆力矩的校正。有利的是,由此,调节偏差在为调节由方 向盘致动器施加的方向盘额定力矩而使用的、方向盘控制器的方向盘力矩调节器中降低。 所述方向盘力矩调节器可以在其稳定性极限内更好地进行参数设置(ausparametrieren)。 这一方法降低了线控转向系统的时滞,从而能够在作为调节回路工作的线控转向系统中设 置更大的放大率,这降低了调节偏差。这带来更好的转向特性、方向盘与轮子运动之间更低 的相移以及在方向盘上力矩的平滑的信号曲线。在方向盘上的触觉反馈和进而由驾驶员所 体会到的转向感受可以由此被改进。由此尤其可以模仿传统的机电式转向系统的转向感 受。所使用的方向盘角速度在此尤其是由轮子控制器为调节所使用的方向盘角速度、必要 时是可修改的方向盘角速度。 在一种实施方式中规定,所述方向盘单元还构造为,确定分别在传递之前出现的 发送延时,并且将分别确定的发送延时同样进行传递,其中,所述轮子单元还构造为,根据 分别传递的发送延时对至少由方向盘单元传递的方向盘角度和/或传递的方向盘角速度进 行插值,和/或所述轮子单元还构造为,确定分别在传递之前出现的发送延时,并且将分别 确定的发送延时同样进行传递,其中,所述方向盘单元还构造为,根据分别传递的发送延时 对至少由轮子单元传递的虚拟的扭杆力矩和/或传递的所采用的方向盘角速度进行插值。 插值在此应表示在预定的时间点上或者说保持(规则的)时间间隔的预定的时间点上的内 插。发送延时包括从检测或计算待传递的值到该值以报告形式经由通信连接被传递的时间 点为止的整体的信号传播时间。所述发送延时可以例如通过检测或读取相应的控制装置的 系统时间的时间戳来确定。为此,由发送时间点和提供时间点(此时已经计算得出或测得被 传递的值)的时间戳构成差。可以规定,发送延时随着实时的报告被发送,其中,发送延时在 此情况下被估算,因为只有所述报告传递之后才能提供实际的发送时间点。然而还可以规 定,发送延时只有随着紧接着后续的报告才被传递。然后,根据分别确定的发送延时在各自 的相反侧对分别传递的值进行插值,从而所述值以规则的时间间隔存在,并且可以补偿波 动。所述插值带来各个值的平滑且无偏的曲线,从而能够在方向盘控制器或轮子控制器中 利用平滑且无偏的信号实现所述值的继续加工。此外,由此还可以摒弃为信号平滑而使用 过滤器,所述过滤器总是会导致时延,所述时延对转向系统的稳定性、转向特性和相位具有 负面影响。在最简单的情况下,使用线性插值。然而也可以使用复杂的插值法,例如借助高 阶多项式的插值、分段插值(例如样条插值)等。 6 CN 111572624 A 说 明 书 4/7 页 在另一种实施方式中规定,所述方向盘控制器构造用于控制所述方向盘致动器, 以便使方向盘主动复位。在此所谋求的尤其在于,在方向盘上始终存在力矩,该力矩将方向 盘复位导引至直线位置或者说中间位置。 在另一种实施方式中规定,所述通信连接构造为控制器局域网(CAN)总线或 FlexRay总线或CAN FD总线。在一种优选的实施方式中尤其规定,所述通信连接构造为CAN FD总线。由于CAN FD总线提供了高数据传递速率,可以改进转向系统的触觉反馈,因为能够 以高时钟速率传递当前虚拟的扭杆力矩。 在一种实施方式中规定,所述轮子控制器具有摩擦补偿装置和/或惯性补偿装置 和/或稳定和动态装置。在此尤其鉴于所述线控转向装置,在传统机电式转向系统中既有的 结构可以被转用,由此能够节省研发成本。 在一种实施方式中规定,所述轮子控制器还构造为,根据至少一个另外的输入值 计算虚拟的扭杆力矩。尤其可以规定,针对在计算虚拟扭杆力矩时所使用的虚拟扭杆的模 型对刚度和/或阻尼或者说衰减常数进行调整。由此可以尤其在动态上影响转向特性和触 觉反馈。作为输入变量可以例如使用交通工具速度、道路摩擦系数值或驾驶模式或疾驰设 置的选择,尤其用于调整响应特性和/或转向感受。 根据本发明的方法具有与线控转向装置的相应特征相同的优点。 附图说明 以下结合附图对本发明的优选实施例进行更详尽的阐述。在附图中: 图1示出线控转向系统的示意图; 图2示出用于交通工具的线控转向系统的一种实施方式的示意图; 图3示出用于交通工具的线控转向系统的另一种实施方式的示意图。











