
技术摘要:
本发明提供一种三自由度展腿机构,其包括椅背、升降模块、U形展腿模块组和腿连接板,其中U形展腿模块组,包括L型连接板和结构相同的左展腿模块、右展腿模块。升降模块固定在椅背第一侧面的中下部,U形展腿模块组通过导轨滑块和升降模块连接。在升降模块中通过摇动手轮 全部
背景技术:
对于下肢运动功能障碍的患者,除了接受早期的手术治疗和必要的药物治疗外, 利用康复机器人提供科学合理的康复训练,已成为提高患者康复质量、降低家庭和社会负 担的必由之路。坐卧式下肢康复机器人是康复机器人的一种类型,能够帮助患者在坐姿或 卧姿的状态下进行一定的主动训练及被动训练,现有的坐卧式下肢康复机器人的单下肢一 般有3个自由度,即髋关节、膝关节、踝关节各有一个转动自由度,大部分不具有下肢机械腿 宽度调节和前后调节的功能,不能适应不同体型的患者。 现有专利CN110179623A提出了一种新型下肢康复机器人,其包括两组对称的腿部 外骨骼结构、座椅机构和虚拟现实系统。该发明的康复机器人结构简单,安装方便,可以控 制关节运动角度为患者提供康复训练,可以为患者各个关节提供康复训练,同时康复训练 位置较为单一。 现有专利CN111035538A提出了一种关节模组直驱坐卧式下肢康复机器人,其包括 能横向调节宽度的两个机械腿支架、座椅组件和移动架。该发明可以调节髋关节的宽度和 摆动幅度,适应不同体型不同身高的人群的康复训练,同时该发明结构较为复杂,整体质量 较大。 现有专利CN110680676A提出了一种下肢康复机器人的康复腿,其包括机械腿主 体、底板、固定板和支撑架。该下肢机器人可以实现机械腿宽度的调节,还未能实现对机械 腿前后位置的调节。
技术实现要素:
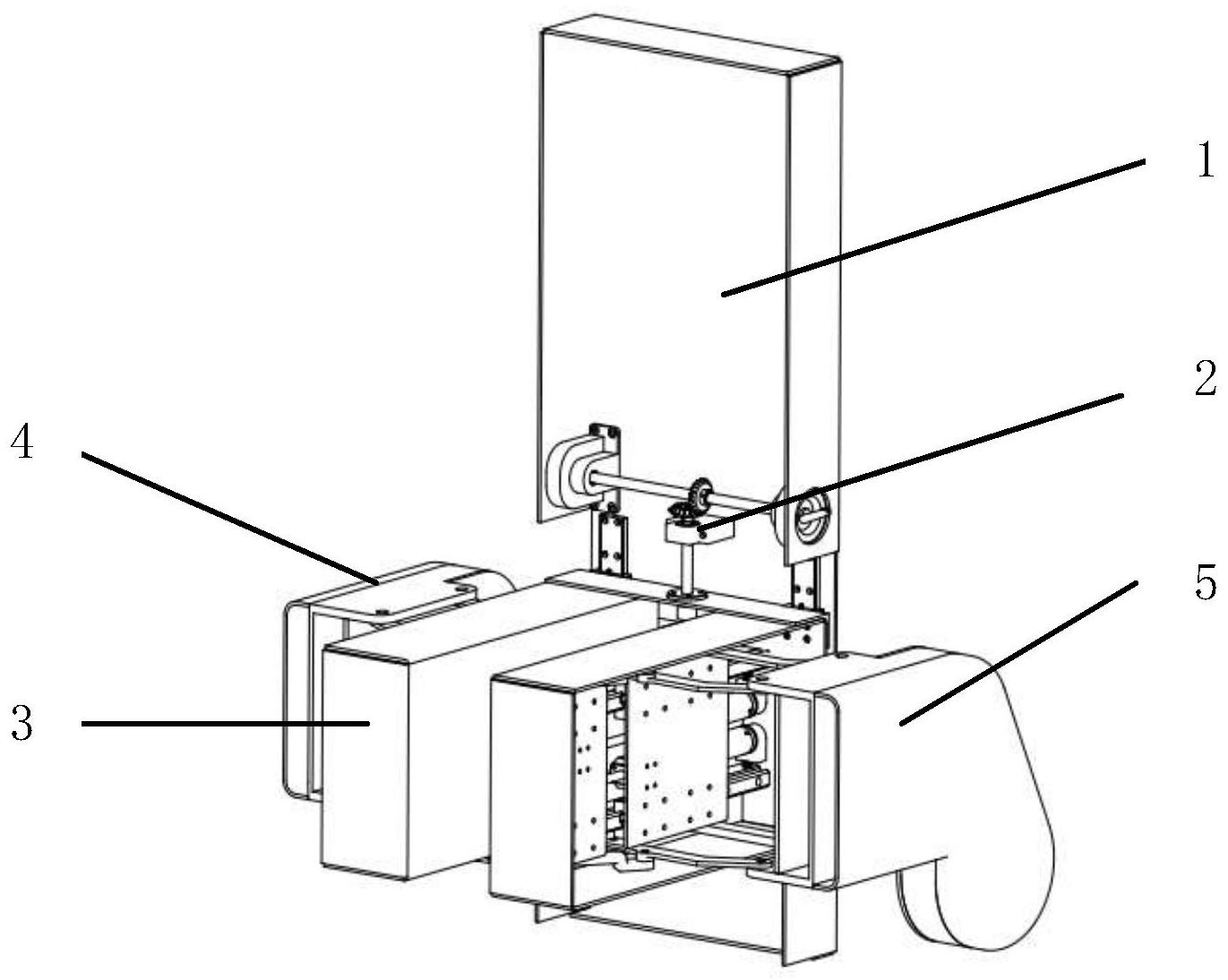
针对下肢康复机构目前存在的技术问题,本发明提供一种三自由度展腿机构,主 要是面对坐卧式下肢康复机构,利用升降模块、平行四边形结构和曲柄滑块结构,来实现机 械腿髋关节在三个直角坐标系轴方向的调节,从而适应不同体型的患者。 本发明提供了一种三自由度展腿机构,其包括椅背、升降模块、U形展腿模块组和 腿连接板,所述腿连接板,其包括左腿连接板和右腿连接板,所述升降模块位于所述椅背第 一侧面的中下部,所述升降模块的第一端和所述椅背的第一侧面连接,所述升降模块的第 二端和所述U形展腿模块组的第一端连接,所述U形展腿模块组的第二端和所述腿连接板连 接。所述升降模块,其包括手轮、驱动轴固定支座、驱动轴、驱动锥齿轮、从动锥齿轮、丝杠、 丝杠固定支座、丝杠游动支座、丝母和升降导轨滑块组件,所述升降导轨滑块组件,其包括 滑块和导轨,所述驱动轴固定支座和所述椅背的第一侧面固定连接,所述驱动轴的两端分 别穿过驱动轴固定支座的轴承孔与手轮连接,所述驱动锥齿轮位于所述驱动轴的中部,并 和驱动轴固定连接,所述驱动锥齿轮和所述从动锥齿轮啮合,所述丝杠的第一端穿过所述 丝杠固定支座的轴承孔和所述从动锥齿轮固定连接,所述丝杠的第二端通过轴承和所述丝 4 CN 111588589 A 说 明 书 2/6 页 杠游动支座连接,所述丝杠和所述丝母滑动连接,所述升降导轨滑块组件的导轨和所述椅 背的第一侧面固定连接。所述U形展腿模块组,其包括左展腿模块、右展腿模块和两块L型连 接板,所述左展腿模块和所述右展腿模块的第一端分别与所述L型连接板固定连接,所述两 块L型连接板分别位于所述展腿模块第一端的上部和下部,两个相同的L型连接板为面对面 布置,所述左展腿模块和所述右展腿模块关于所述L型连接板的中面对称布置,所述L型连 接板分别与所述丝母和所述升降导轨滑块组件中的滑块固定连接。所述左展腿模块和所述 右展腿模块的结构相同,其包括展腿模块框、电机架、第一直线驱动组件、第二直线驱动组 件、移动滑块、展腿滑块、撑开杆、前连杆、后连杆和展腿导轨滑块组件,所述展腿导轨滑块 组件,其包括导轨和滑块,所述展腿模块框的第一侧面和所述L型连接板固定连接,所述电 机架位于所述展腿模块框中与第一侧面相邻的第二侧面的中部,并与所述展腿模块框的第 二侧面固定连接,所述第一直线驱动组件和所述第二直线驱动组件的驱动电机的外壳分别 与所述电机架的上表面固定连接,所述展腿导轨滑块组件中的导轨对称分布在电机架的两 侧,并和所述展腿模块框的第二侧面固定连接,所述移动滑块和所述展腿滑块分别与所述 展腿导轨滑块组件中的滑块固定连接;所述前连杆的第一端通过转动副和所述移动滑块的 第一端连接,所述前连杆的第二端通过转动副和所述腿连接板的第一端连接,所述后连杆 的第一端通过转动副和所述移动滑块的第二端连接,所述后连杆的第二端通过转动副和所 述撑开杆的第二端连接,所述后连杆的第三端通过转动副和所述腿连接板的第二端连接, 所述撑开杆的第一端通过转动副和所述展腿滑块连接。 可优选的是,所述手轮、所述驱动轴固定支座和所述升降导轨滑块组件关于丝杠 对称分布在所述椅背第一侧面的两侧,所述丝杠的轴线和所述驱动轴的轴线的夹角为90 度,所述驱动轴的轴线和所述丝杠的轴线均与椅背第一侧面的平面平行,所述升降导轨滑 块组件中导轨的轴线和所述丝杠的轴线平行。 可优选的是,所述U形展腿模块组的U形底面和所述椅背第一侧面的平面平行,所 述第一直线驱动组件的轴线和所述第二直线驱动组件的轴线互相平行,并与所述椅背第一 侧面的平面垂直,所述展腿导轨滑块组件中的导轨轴线和所述直线驱动组件的轴线平行。 可优选的是,所述第一直线驱动组件和所述第二直线驱动组件的结构相同,其包 括驱动电机、驱动丝杠、驱动丝母和驱动丝杠座,所述驱动电机的外壳和所述电机架的上表 面固定连接,所述驱动丝杠座和所述展腿模块框固定连接,所述驱动丝杠的第一端穿过所 述驱动丝杠座和所述驱动电机的输出轴,所述驱动丝杠的第二端和所述驱动丝杠座连接, 所述驱动丝杠和所述驱动丝母连接,第一驱动丝母的上表面和所述移动滑块固定连接,第 二驱动丝母的上表面和所述展腿滑块固定连接。 可优选的是,在所述展腿模块中,所述前连杆、所述后连杆、所述移动滑块和所述 腿部连接板构成平行四边形机构,所述展腿滑块、所述撑开杆、所述后连杆和所述移动滑块 构成曲柄滑块机构。 可优选的是,所述撑开杆、所述前连杆和所述后连杆均由两根相同的连杆构成,所 述前连杆第一端和第二端转动副的轴线、所述后连杆第一端、第二端和第三端转动副的轴 线与所述撑开杆第一端和第二端的转动副轴线互相平行,且分别与所述第一直线驱动组件 和所述第二直线驱动组件的轴线垂直,所述第一直线驱动组件和所述第二直线驱动组件的 轴线分别与所述展腿模块框的第二侧面平行。 5 CN 111588589 A 说 明 书 3/6 页 本发明与现有技术相比,具有如下优点: 1.本发明可以在三个方向调节机械腿髋关节转动中心的位置,适应不同体型的患 者,适用范围广。 2.本发明在宽度和前后方向上既可以一起调节左右机械腿的位置,用于双下肢运 动功能康复训练,也可以分开调节,用于单下肢运动功能康复训练,适用不同情况的康复训 练。 3.本发明利用曲柄滑块机构和平行四边形机构实现调节功能,结构简单,占用空 间小。 4.本发明可以作为一个模块组合到任意一款坐卧式下肢康复机器人上。 附图说明 图1为本发明三自由度展腿机构的整体结构示意图; 图2为本发明三自由度展腿机构的椅背和升降模块的结构示意图; 图3为本发明三自由度展腿机构的U形展腿模块组的结构示意图; 图4为本发明三自由度展腿机构的展腿模块第一角度示意图;以及 图5为本发明三自由度展腿机构的展腿模块第二角度示意图。 主要附图标记: 椅背1,升降模块2,手轮201,驱动轴固定支座202,驱动轴203,驱动锥齿轮204,从 动锥齿轮205,丝杠206,丝杠固定支座207,丝杠游动支座208,丝母209,升降导轨滑块组件 210,U形展腿模块组3,左展腿模块301,右展腿模块302,L型连接板303,展腿模块框304,电 机架305,第一直线驱动组件306,第二直线驱动组件307,移动滑块308,展腿滑块309,撑开 杆310,前连杆311,后连杆312,展腿导轨滑块组件313,左腿连接板4,右腿连接板5。











