
技术摘要:
本发明涉及缆机领域,本发明旨在解决有的缆机吊物摆幅分析方法存在准确度较低的问题,提出一种缆机吊物的摆幅计算方法,包括:获取缆机吊钩相对于缆机主索直线的第一实时摆幅;实时检测缆机吊钩范围内的风速、风向和空气密度,获取吊物的受风面积、风向与缆机主索直线 全部
背景技术:
缆机是混凝土坝施工资源入仓的主要途径。缆机运行是否安全对大坝工程施工至 关重要,也是管理水平的体现。在深窄峡谷中,缆机运行安全受大风影响十分明显,在长时 间大风或瞬时大风条件下,极易发生缆机缆绳或吊罐碰撞。 现有技术中对缆机吊物摆幅分析时通常将吊物与吊钩视为一个整体,没有考虑大 风作用对吊物的影响,导致摆幅分析结果与吊物的实际摆幅存在误差。
技术实现要素:
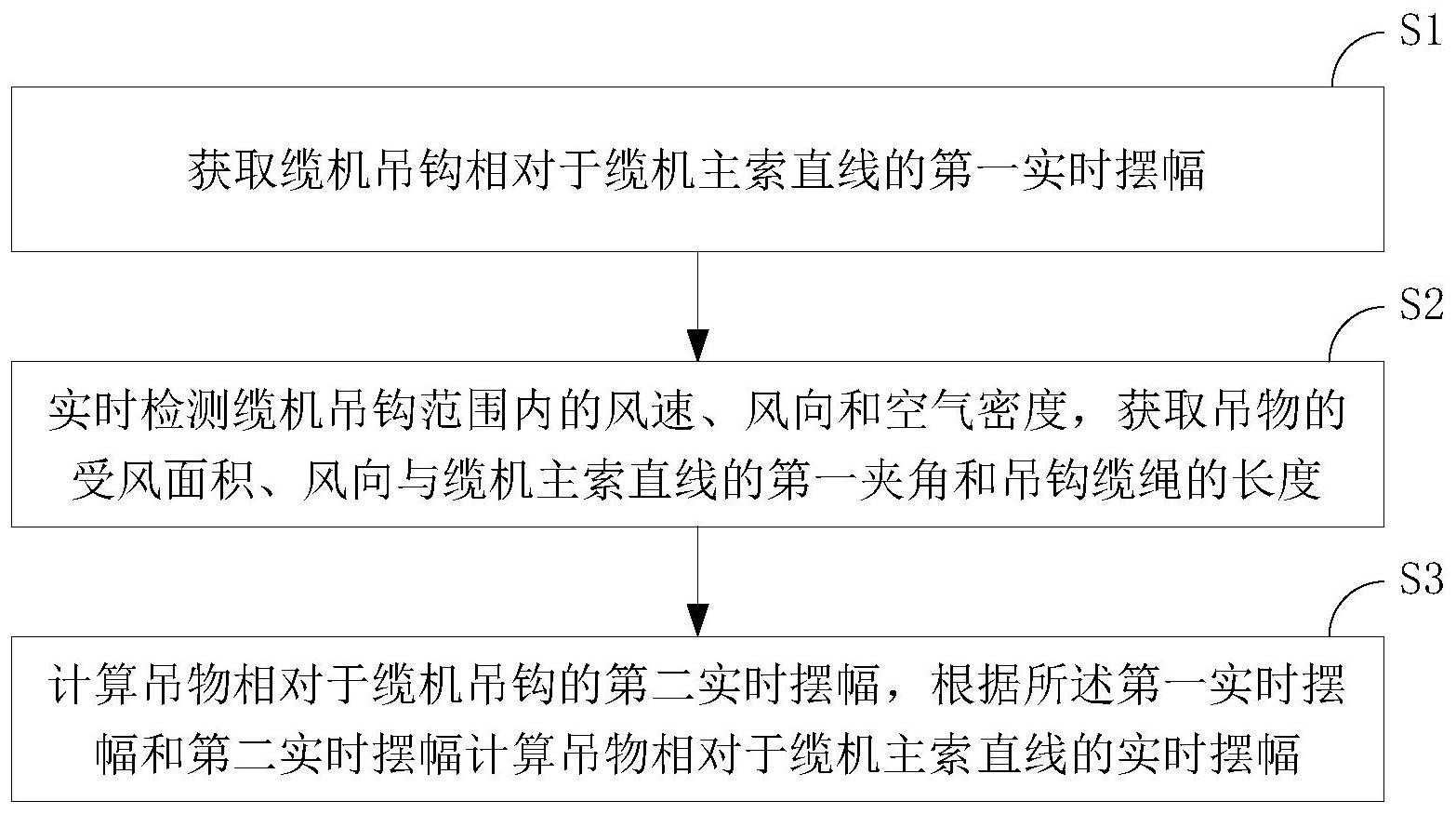
本发明旨在解决有的缆机吊物摆幅分析方法存在准确度较低的问题,提出一种缆 机吊物的摆幅计算方法。 本发明解决上述技术问题所采用的技术方案是:缆机吊物的摆幅计算方法,包括 以下步骤: 获取缆机吊钩相对于缆机主索直线的第一实时摆幅δ1; 实时检测缆机吊钩范围内的风速V、风向θ和空气密度ρ,获取吊物的受风面积S、风 向与缆机主索直线的第一夹角α和吊钩缆绳的长度L,所述吊钩缆绳的长度L为缆机吊钩与 吊物之间的缆绳长度; 根据所述风速V、风向θ、空气密度ρ、吊物的受风面积S和第一夹角α计算吊物相对 于缆机吊钩的第二实时摆幅δ2,根据所述第一实时摆幅δ1和第二实时摆幅δ2计算吊物相对 于缆机主索直线的实时摆幅δ。 进一步的,所述获取缆机吊钩相对于缆机主索直线的第一实时摆幅的方法包括: 实时获取缆机主塔的第一坐标P1(x1,y1,z1)、缆机副塔的第二坐标P2(x2,y2,z2)和 缆机吊钩的第三坐标P3(x3,y3,z3); 根据所述第一坐标P1和第二坐标P2确定缆机主索直线在水平面上的直线方程,根 据所述直线方程和第三坐标P3计算水平面上缆机吊钩到缆机主索直线的垂直距离,所述垂 直距离即为缆机吊钩相对于缆机主索直线的第一实时摆幅δ1。 进一步的,所述第一实时摆幅δ1的计算公式为: 式中, 进一步的,所述吊物相对于缆机主索直线的实时摆幅δ的计算公式为: δ=(-1)ωδ1 δ2; 4 CN 111606215 A 说 明 书 2/5 页 式中,当y3-y1≥0时,ω=0,当y3-y1<0时,ω=1。 进一步的,所述第二实时摆幅δ2的计算方法包括: 根据所述风速V、空气密度ρ和吊物的受风面积S计算吊物所受风力Ft; 获取吊物的重量Gt,根据所述吊物所受的风力Ft与吊物的重量Gt计算吊钩缆绳与 垂直轴线的第二夹角β; 根据所述第一夹角α、第二夹角β和吊钩缆绳的长度L计算吊物相对于缆机吊钩的 第二实时摆幅δ2。 进一步的,所述风向与缆机主索直线的第一夹角α的获取方法包括: 根据所述第一坐标P1和第二坐标P2计算缆机轨道与缆机主索直线的第三夹角γ, 获取缆机轨道的方位角φ,根据所述缆机轨道的方位角φ、风向θ与第三夹角γ计算风向与 缆机主索直线的第一夹角α。 进一步的,所述缆机轨道与缆机主索直线的第三夹角γ的计算公式为: 式中, 所述第一夹角α的计算公式为: α=θ-(φ π-γ)。 进一步的,所述吊钩缆绳与垂直轴线的第二夹角β的计算公式为: 进一步的,所述第二实时摆幅δ2的计算公式为: δ2=L sin α sin β。 进一步的,所述吊钩缆绳的长度L获取的方法包括: 获取吊钩缆绳的原长度l、吊钩缆绳的弹性系数K和吊钩缆绳空载与负载的拉力变 化ΔG; 根据所述吊钩缆绳的原长度l、吊钩缆绳的弹性系数K和吊钩缆绳空载与负载的拉 力变化ΔG计算吊钩缆绳的长度L,计算公式如下: L=l ΔGK。 本发明的有益效果是:本发明所述的缆机吊物的摆幅计算方法,根据缆机吊钩相 对于缆机主索直线的第一实时摆幅和吊物相对于缆机吊钩的第二实时摆幅来计算吊物相 对于缆机主索直线的实时摆幅,提高了缆机吊物的摆幅计算的准确度,降低了外界风环境 因素对摆幅误差的影响,提高了缆机运行的安全性和可靠性。 附图说明 图1为本发明实施例所述的缆机吊物的摆幅计算方法的流程示意图; 图2为本发明实施例所述的缆机结构示意图; 图3为本发明实施例所述的缆机吊物受力分析示意图; 附图标记说明: 5 CN 111606215 A 说 明 书 3/5 页 1-缆机主塔;2-缆机副塔;3-缆机吊钩;4-吊物;5-缆机小车;δ11-缆机小车相对于 缆机主索直线的摆幅;δ12-缆机吊钩相对于缆机小车的摆幅;δ2-吊物相对于缆机吊钩的第 二实时摆幅;β-吊钩缆绳与垂直轴线的第二夹角;Ft-吊物所受风力;Gt-吊物的重量。











