
技术摘要:
本发明涉及一种可应对多种支护情况的采煤方法,包括:采煤机割煤,采煤机进行进刀割煤,并将所割煤体输送至刮板输送机;移架机根据感应采煤机经过移架机的速度确定所述采煤机的行驶速度;移架机到位,移架机随采煤机移动方向且根据采煤机的行驶速度靠近所述采煤机方向 全部
背景技术:
采煤工作面智能化开采是现代采煤工艺发展一大趋势,对于缓倾斜工作面如何实 现液压支架的智能跟机移架。保证智能开采的连续性,是智能开采的一大技术课题。 现有自动化开采技术,跟机移架单台只有简单的降-移-升动作,没有移架调架的 模式,大部分的支架姿态调整需要人工干预。对于在全工作面移架过程只有根据支架显示 的煤机位置进行触发移架。没有根据现场条件进行的移架模式修改。在工作面刮板机出现 上窜下滑的时候,没有智能化的调整移架方式对待应变。
技术实现要素:
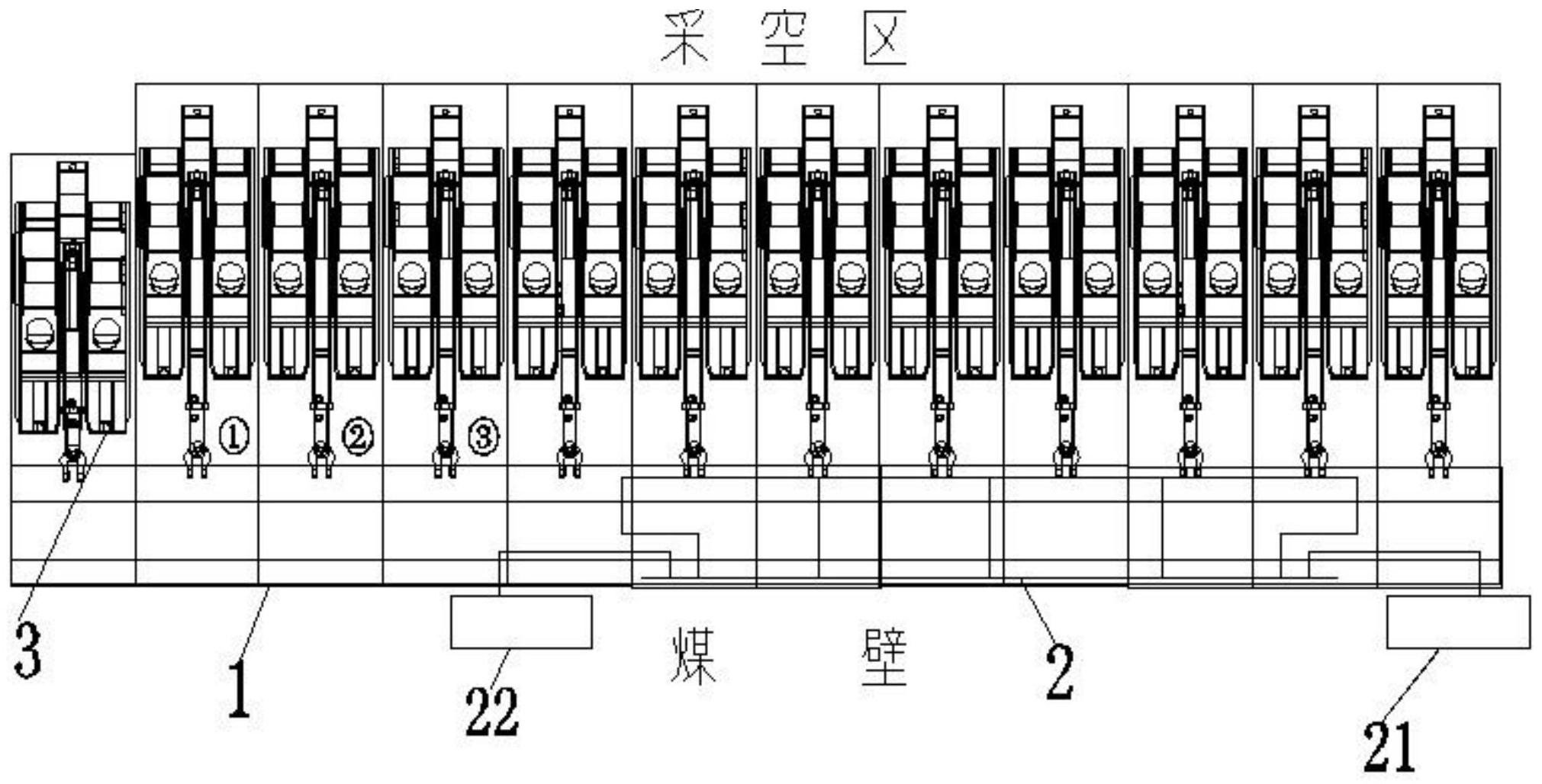
本申请提供了一种可应对多种支护情况的采煤方法,以应对采煤过程中存在的多 种需要支护的情况。 本申请采用的技术方案如下: 本发明提供的一种可应对多种支护情况的采煤方法,包括: 采煤机割煤,采煤机进行进刀割煤,并将所割煤体输送至刮板输送机; 移架机根据感应采煤机经过移架机的速度确定所述采煤机的行驶速度; 移架机到位,移架机随采煤机移动方向且根据采煤机的行驶速度靠近所述采煤机 方向,沿所述刮板输送机长度方向设置有若干个移架机; 移架机支护,在所述采煤机远离工作面煤壁的一侧对割煤后的工作面对进行实时 支护,所述支护至少包括顶层支护。 进一步地,根据采煤机对应的进刀距离以斜切方式进刀割煤。 进一步地,所述移架机为液压移架机。 进一步地,所述移架机支护的方法具体为: 当移架机感应到采煤机速度小于6m/min时,移架机在采煤机移动方向顺序移架, 移架机的顶部支护伸出; 当采煤机速度大于6m/min且小于10m/min时,移架机在采煤机移动方向进行差动 移架,同时进行间隔的两台移架机进行差动移设,移架机的顶部支护伸出; 当采煤机速度大于10m/min时,移架机在采煤机移动方向进行差动移架,同时进行 间隔的两台或者三台移架机进行差动交替移设,移架机的顶部支护伸出。 进一步地,单台所述移架机的移设时间为15s。 进一步地,所述移架机感应采煤机速度的方式为红外感应,所述采煤机上有红外 发射信号单元,每台所述移架机上具有红外信号接收单元。 进一步地,当刮板输送机下滑时,所述顶部支护伸出的对应的移架机的底部升降 架收回。 3 CN 111594169 A 说 明 书 2/4 页 进一步地,当刮板输送机上窜时,所述顶部支护伸出的对应的移架机的底部升降 架伸出。 采用本申请的技术方案的有益效果如下: 本发明的一种可应对多种支护情况的采煤方法,由于移架机可以根据采煤机的速 度进行移架, 1、达到了自动进行调整移架机姿态的功能; 2、可以根据采煤机速度发生变化是采用的不同的跟机模式; 3、可以在工作面刮板机出现上窜下滑是采用的不同的跟机模式。 附图说明 为了更清楚地说明本申请的技术方案,下面将对实施例中所需要使用的附图作简 单地介绍,显而易见地,对于本领域普通技术人员而言,在不付出创造性劳动的前提下,还 可以根据这些附图获得其他的附图。 图1为本发明实施例的一种可应对多种支护情况的采煤方法的第一种模式的示意 图; 图2为本发明实施例的一种可应对多种支护情况的采煤方法的第二种模式的示意 图; 图3为本发明实施例的一种可应对多种支护情况的采煤方法的第三种模式的示意 图; 图示说明: 其中,1-刮板输送机;2-采煤机;3-移架机;21-采煤机前滚筒;22-采煤机后滚筒。











