
技术摘要:
本发明公开了一种微型无人机及其飞行控制方法,包括无人机主体、多个微型摄像头和涡轮组件;多个微型摄像头均匀设置在无人机主体底边外侧;涡轮组件包括入风主涡轮、出风涡轮和多个出风分支涡轮,入风主涡轮设置在无人机主体顶部的入风口,入风口的外部带有防护罩,避 全部
背景技术:
现有技术中,微型无人机大多采用旋翼杆,外形大而且不方便回落在较小的空间, 比如肩头,帽顶。应用场景受限,无法满足年轻人的外拍需求。
技术实现要素:
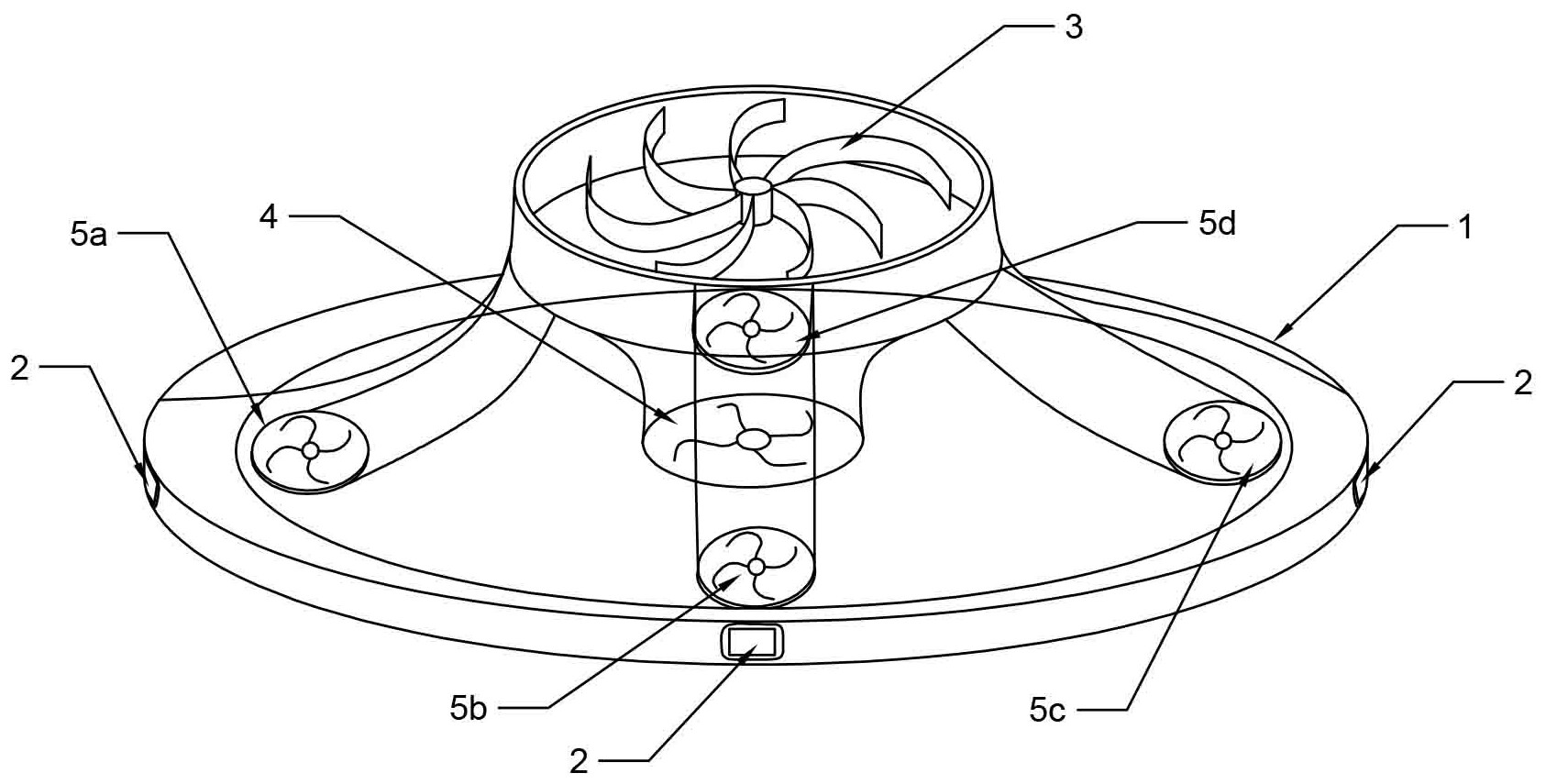
针对现有技术中的不足之处,本发明提供一种微型无人机及其飞行控制方法。 为了达到上述目的,本发明技术方案如下: 一种微型无人机,包括无人机主体、多个微型摄像头和涡轮组件;多个微型摄像头均匀 设置在无人机主体底边外侧;涡轮组件包括入风主涡轮、出风涡轮和多个出风分支涡轮,入 风主涡轮设置在无人机主体顶部的入风口;无人机主体底部设有自然向下的出风口,出风 涡轮设置在该出风口处,用于控制升降;四个出风分支涡轮均匀分布在无人机主体底部周 边的排风口处,用于调控风量和方向。 进一步的,所述无人机主体的外形上窄下宽的类灯笼状。 进一步的,所述无人机主体的高度小于8cm,以达到扁平化,易于飞行。 进一步的,所述无人机主体的底部出风口半径是顶部入风口的三分之一。 还包括返回装置,所述返回装置设有带有磁性的停机平台,与无人机主体底部有 环形铁片相互吸引,实现无人机的可磁性粘停。 一种微型无人机的飞行控制方法,包括以下步骤: S1 开启入风主涡轮,带动微型无人机上浮; S2 微型无人机上浮的同时,开启出风涡轮稳定重心; S3 通过控制四个方向的出风分支涡轮的开合和转速,调整飞行方向。 有益效果:本发明的微型无人机手掌心大小,体积小、重量轻,容易携带,飞行时间 长。 附图说明 图1为本发明的微型无人机结构示意图。 图中,1-无人机主体,2-微型摄像头,3-入风主涡轮,4-出风涡轮,5-出风分支涡 轮,6-防护罩,7-出风口,8-排风口,9-停机平台,10-环形铁片。











