
技术摘要:
本发明公开了一种基于五比特Brown态受控多方联合远程制备三比特态方法。本发明首次基于五比特Brown态实现受控多方联合远程制备三比特态,主要特征是:基于五比特Brown态受控多方联合远程制备任意三比特态。发送方与接收方共享的信道是由五比特Brown态加三比特GHZ态加辅 全部
背景技术:
2000年至2001年,Bennett,Lo和Pati三人一起提出了量子态远程制备。这些方案 都是基于双粒子纠缠态完成任意已知或未知单量子比特态的远程制备。此后人们提出了多 种不同的量子远程态制备方法,包括可信量子远程态制备(FRSP)、低纠缠量子远程态制备 (LERSP)、最优量子远程态制备(ORSP)和多粒子量子远程态制备(MRSP)等。上述这些方案是 围绕量子远程态制备的不同方向开展研究,每个方案都拥有其不同的特点。 量子纠缠态是重要的量子通信资源,在量子通信协议中具有深远影响以及广泛应 用。2005年Brown等人发现了一种新型五粒子最大纠缠态---Brown态,与四比特以及五比特 的GHZ态相比,已有研究证明Brown态具有较好的纠缠稳定性,可以适用于各种量子通信方 案。 近年来,出现了一些基于Brown态的远程态制备研究。2012年,Chen等人提出了两 种基于五比特Brown态受控远程态制备(CRSP)方案,目标态的系数分为实数和复数,通过构 建通用的测量基,可以减少对目标态的系数限制,并详细分析了方案的安全性,方案成功概 率为50%。2013年,Luo等人提出了两种联合远程态制备(JRSP)五比特Brown态方案,目标态 的系数分为实数和复数,并且将方案扩展到N个发送方。2016年,Chen等人提出了基于七比 特Brown态联合远程态制备(JRSP)方案,该方案制备出任意两比特的成功概率为25%,并且 给出了几种提高方案成功率的方法。2017年,Ma等人提出了两种基于五比特Brown态确定远 程态制备(DRSP),成功率达到100%,并且在幅度衰减噪声和相位阻尼噪声环境下分析方案 的保真度。2018年,Dong等人分析基于七比特Brown态受控远程态制备(CRSP)方案在幅度衰 减噪声和相位阻尼噪声环境下的保真度。
技术实现要素:
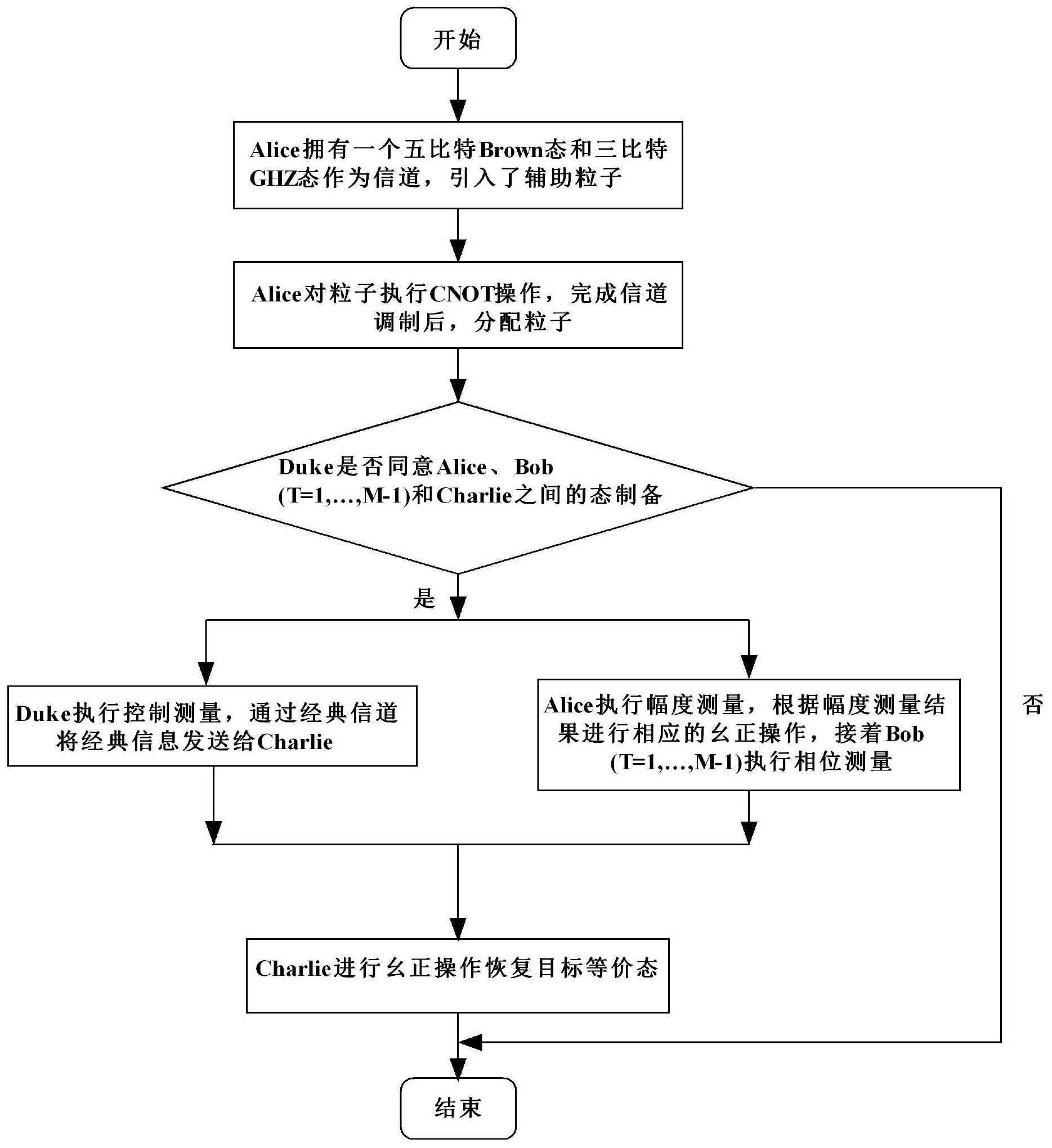
本发明要解决的技术问题是提供一种基于五比特Brown态受控多方联合远程制备 三比特态方法。 为了解决上述技术问题,本发明提供了一种基于五比特Brown态受控多方联合远 程制备三比特态方法,包括: 步骤1:信道准备。在控制方Duke控制下,发送方Alice和BobT(T=1,…,M-1)想要 帮接收方Charlie远程制备任意三比特态,其表达形式如下: 7 CN 111555877 A 说 明 书 2/13 页 其中幅度系数{aj ,j∈{0 ,1 ,...,7}}是实数,满足归一化条件 相位 {θs,s∈{0,1,...,7}}满足条件θs∈[0,2π)。 信道调制前所有粒子可以都属于发送方Alice,可以都属于发送方BobT(T=1,…, M-1)中的任何一方,也可以都属于任意的第三方。假设Alice拥有一个五比特Brown态和三 比特GHZ态作为信道,其表达形式如下: Alice引入了辅助粒子C1和C2,并将它们都初始化为|0>,为了实现多方发送,Alice 引入了辅助粒子 并将它们 初始化为|0>。Alice享有的信道形式如下: 步骤2:信道调制。Alice对粒子(A1,C1)和(A2,C2)分别执行CNOT操作,其中粒子A1和A2作 为控制量子比特,粒子C 和C 作为目标量子比特。Alice对粒子(B (1),B (1)1 1 1 2 ,B (1)3 ,…, )执行CNOT操作,其中粒子(B (1),B (1),B (1)1 2 3 )作为控制量子比 特, 作为目标量子比特。完成信 道调制后,Alice对粒子进行重新分配,其中粒子(A1,A2,A3)属于Alice,粒子(B1,B2,B3)属于 BobT(T=1 ,…,M-1),粒子(C1,C2,C3)属于Charlie,粒子D1属于Duke。经过信道调制,Alice、 BobT(T=1,…,M-1)、Charlie和Duke共享的信道形式如下: 8 CN 111555877 A 说 明 书 3/13 页 步骤3:量子测量。Alice对粒子(A1,A2,A3)执行幅度测量,测量基{|ωm> ,m∈{0, 1,...,7}}的表达形式如下: Alice进行幅度测量,整个系统可以写为如下形式: Alice完成幅度测量后,BobT(T=1,…,M-1)没有立刻执行相位测量,根据测量结 果{|ωm> ,m∈{0,1 ,...,7}},BobT(T=1,…,M-1)和Charlie对粒子(B (1)1 ,B (1)2 ,B (1)3 ,…, 9 CN 111555877 A 说 明 书 4/13 页 C1,C2,C3)执行对应的幺正操作Um。 接着,BobT(T=1,…,M-1)选择相位测量基{|λm>,m∈{0,1,...,7}}对粒子 (T=1,…,M-1)执行相位测量,其表达形式如下: 其中 同时,当控制方Duke同意Alice、BobT(T=1,…,M-1)和Charlie之间的态制备,就 会对粒子D1执行测量{|0>,|1>}。Duke通过经典信道发送经典信息给Charlie。 步骤4:恢复目标等价态。Alice的测量结果 对应的二进制序列为 BobT(T=1 ,… ,M-1)的测量结果 对应的二进制序列为 幺正操作I和(σ)分别对应Z(0)和Z(1)z 。如果Duke的 测量结果为|0>,Charlie获得Alice和BobT(T=1,…,M-1)的测量结果,对每一位执行二进 制异或操作 Charlie根据m(2) ,m(1) ,m(0)的值执行对应的幺正操作 可以恢复目标等 价态|τ>。如果Duke的测量结果为|1>,Charlie获得Alice和BobT(T=1,…,M-1)的测量结 果,对每一位执行二进制异或操作 10 CN 111555877 A 说 明 书 5/13 页 并将m(2)和 m(1)的值取反。Charlie根据m(2) ,m(1) ,m(0)的值执行对应的幺正操作 可 以恢复目标等价态|τ>。 本发明的有益效果: 基于五比特Brown态受控多方联合远程制备三比特态,目标态的系数可以是复数 也可以是实数;成功恢复目标态的概率可以达到100%;涉及的操作具有便捷性,使用三量 子比特投影测量,相比于多量子比特态联合测量,物理操作简单易行,降低了测量难度和设 备需求。它在量子通信技术领域里有广阔的应用前景。 附图说明 图1是本发明的受控多方联合远程制备三比特态方法流程图。











