
技术摘要:
本发明公开了一种基于PSO与神经网络串联优化的道路通行时间预测方法,首先依据传统阻抗函数的不足,提出了考虑车型影响的道路阻抗函数,利用PSO算法标定优化的道路阻抗函数中的待定参数,其次利用BP神经网络对标定后的道路阻抗函数进行进一步的修正,通过两种算法的串 全部
背景技术:
道路阻抗函数是指路段上行驶时间与路段的交通负荷之间存在的函数关系,它是 出行者进行路径选择与管理者进行交通流分配的重要依据。即如何得到一个准确的可以反 映实际道路通行时间的阻抗函数一直是国内外学者研究的重点。 国外对路段阻抗函数的研究较早,很多经典的阻抗函数模型都是国外建立的。其 中大部分都是使用模型来描述道路的行驶状况,并通过实际调查得到的道路信息标定模型 中的待定参数。美国公路局首先对高速公路的通行时间进行了深入的分析,通过实验得到 大量的基础数据,最终利用回归分析得到了BPR函数。Spiess等人针对BPR函数中β值过高引 起的精度值过低及在饱和度较低时出行时间变化幅度小的问题,改进了阻抗函数模型; Davidson以排队论为基础,提出了具有渐进性的阻抗函数,即当道路交通量达到道路容量 时行驶时间为无穷大。U.Mori对BPR函数在阻抗影响参数取值过高时精度不能保证和当饱 和度在低位时运行时间几乎不变的问题进行了改进。上述模型都从不同方面计算或优化道 路阻抗函数模型。国内对于道路阻抗函数模型研究开始于20世纪90年代,主要是在美国BPR 函数上的进一步优化修正。杨佩昆构造出道路横断面不同路幅形式下的路段行程时间函数 模型,模型考虑了不同路段、不同车型对道路通行能力的影响,并通过回归法对模型中待定 参数进行标定。何南考虑了道路拥挤情况下的道路阻抗函数,还将交叉口密度、公交车站密 度、非机动车密度和饱和度等影响因素进行定量化,构造了一种改进的BPR函数,并以不同 道路的实测数据进行了道路交通阻抗函数的计算,验证结果表明了模型的有效性。潘义勇 将城市交通道路阻抗分为路段阻抗与节点阻抗两部分,路段阻抗利用交通量与交通密度间 的相互关系优化BPR函数得到,节点阻抗根据交叉口道路饱和度不同选用不同模型得到。但 是,上述阻抗函数求得路段通行时间与实际值还存在较大的偏差。
技术实现要素:
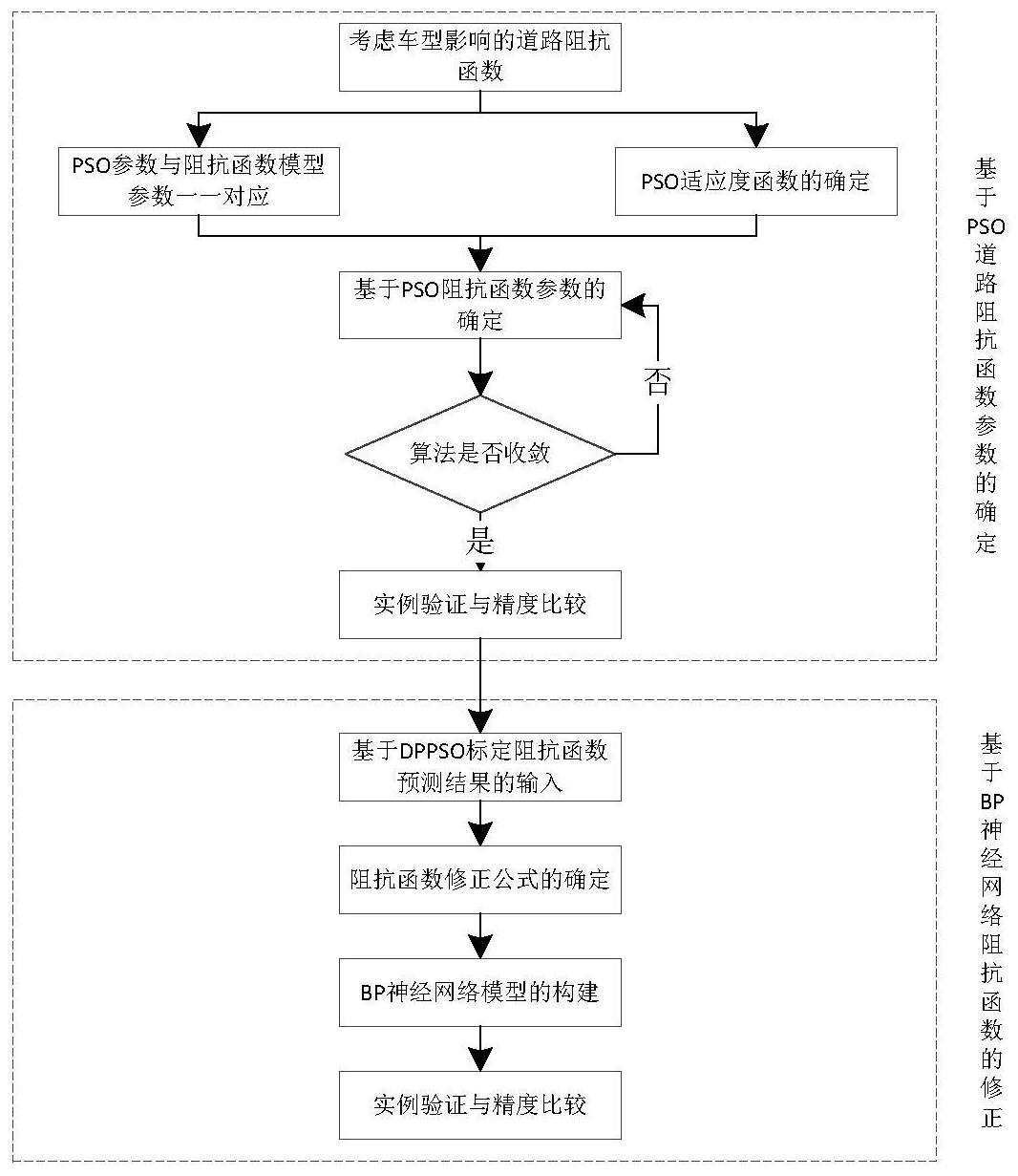
本发明所要解决的技术问题是提供一种基于PSO与神经网络串联优化的道路通行 时间预测方法,提高道路通行时间预测的准确度。 为解决上述技术问题,本发明所采用的技术方案是: 一种基于PSO与BP神经网络串联优化的道路阻抗预测方法,其特征在于包含以下 步骤: 步骤一:道路阻抗函数为 其中,Q总表示路段总交通量,Q大表示路段上大型车交通量,Q中表示路段上中型车交 5 CN 111553527 A 说 明 书 2/11 页 通量,C表示路段上的通行能力;a1、a2、a3、β1、β2、β3为待定参数; Q总与Q中、Q大的关系如下式所示 Q总=Q小 ρ·Q中 μ·Q大 其中,Q小表示路段上标准小客车交通量;ρ表示中型车的折算为标准小汽车的系 数,μ表示大型车的折算为标准小汽车的系数; 步骤二:基于PSO对道路阻抗函数参数进行标定; 步骤三:基于BP神经网络对道路阻抗函数进行修正; 步骤四:通过修正后的道路阻抗函数计算得到路段的通行时间。 进一步地,所述步骤一中,ρ取值为1.5,μ取值为2。 进一步地,所述步骤二具体为 2.1采集道路交通量与行驶时间信息; 2.2道路阻抗函数变型; 2.3基于PSO对阻抗函数参数进行标定。 进一步地,所述2.1具体为 为了标定道路阻抗函数中各参数的取值,利用区间观测法在道路两交叉口之间分 别安置一个摄像头,两交叉口之间无其它交叉路段,被调查道路车辆没有中途掉头的情况 下,两台摄像机拍摄的车辆数是相同的,统计任意一个摄像机拍摄结果即可以得到各车型 的交通量; 同时利用车牌辨识车辆,两个摄像机同时工作,在摄像机1出现的车辆,在摄像机2 再次出现时,记录两个摄像机之间的时间差从而得到车辆的行驶时间。 进一步地,所述2.2具体为 根据2.1得到N个样本,每个样本包含大型车交通量数、中型车交通量数、小型车交 通量数、该种道路情况下的行驶时间; 通过求解下式的最小值来标定各参数的取值: 0











