
技术摘要:
本发明提供一种爬壁磁吸附机器人的行走底盘,涉及机器人配件技术领域,以解决现有的磁吸附机器人行走底盘在对船身修补的时候,没有辅助清理船身青苔或其他附着物的结构,船身在长时间使用之后容易产生青苔,而磁吸附机器人在遇到青苔的时候,容易出现滑动导致无法移动 全部
背景技术:
爬壁机器人又称为壁面移动机器人,因为垂直壁面作业超出人的极限,因此在国 外又称为极限作业机器人。爬壁机器人必须具备吸附和移动两个基本功能,而常见吸附方 式有负压吸附和永磁吸附两种。 例如申请号:CN201811359783.7中涉及一种非接触轮式爬壁机器人底盘装置,包 括差速转向式驱动结构,两只驱动轮、从动轮均为对角布置,使得整车驱动力分布更加平 衡,提高了爬壁行走时的平稳性和可靠性,采用非接触式吸附单元,全部永磁铁均同时提供 吸附力,避免了传统履带吸附和磁轮吸附方案中磁铁利用率不足的问题,将履带式底盘和 磁轮式底盘的优势相结合,有效克服了现有的爬壁机器人底盘的吸附能力与行走阻力之间 互斥的矛盾,有效减小了总体重量,降低了行走阻力,达到节能提效的效果。 基于现有技术发现,现有的磁吸附机器人行走底盘在使用的时候,永磁块的高度 无法便捷的调节,永磁块在距离吸附面较近时,容易产生较大的移动阻力,使机器人产生较 多的损耗,且现有的磁吸附机器人行走底盘在对船身修补的时候,没有辅助清理船身青苔 或其他附着物的结构,船身在长时间使用之后容易产生青苔,而磁吸附机器人在遇到青苔 的时候,容易出现滑动导致无法移动。
技术实现要素:
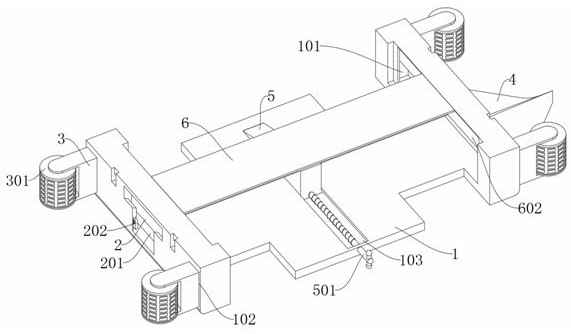
为了解决上述技术问题,本发明提供一种爬壁磁吸附机器人的行走底盘,以解决 现有的磁吸附机器人行走底盘在使用的时候,永磁块的高度无法便捷的调节,永磁块在距 离吸附面较近时,容易产生较大的移动阻力,使机器人产生较多的损耗,且现有的磁吸附机 器人行走底盘在对船身修补的时候,没有辅助清理船身青苔或其他附着物的结构,船身在 长时间使用之后容易产生青苔,而磁吸附机器人在遇到青苔的时候,容易出现滑动导致无 法移动的问题。 本发明一种爬壁磁吸附机器人的行走底盘的目的与功效,由以下具体技术手段所 达成: 一种爬壁磁吸附机器人的行走底盘,包括主体,连接槽,缓冲件,辅助件,顶块和连接 板;所述主体为矩形结构,且主体的中间位置为板状结构;所述主体为行走底盘本体;所述 连接槽设在主体的两端外侧中间位置,且连接槽的插入口的底部为楔形结构;所述缓冲件 的内端嵌入安装在侧槽的内部,且缓冲件的内端通过弹簧与侧槽内部相连接;所述辅助件 安装在主体的前端,且辅助件的连接块嵌入安装在连接槽以及内槽的内部,并且连接块的 外端两侧与顶板相接触;所述顶块的底端通过嵌入的方式安装在中槽的内部,且顶块内部 的调节杆的内端以及挡板嵌入安装在旋转槽的内部;所述连接板包括有受力板和永磁块; 3 CN 111572664 A 说 明 书 2/5 页 所述连接板为矩形板状结构,且连接板的顶端通过弹簧安装有受力板;所述连接板的两端 与永磁块的底部相连接,且永磁块为矩形长条状结构;所述连接板的底部中间位置与顶块 的倾斜侧边相接触;所述连接板上方的受力板两端与主体的内部顶端中间位置相连接,且 连接板两端的永磁块嵌入安装在移动槽的内部。 进一步的,所述主体包括有移动槽,侧槽,中槽,旋转槽;所述主体的两端内部设有 移动槽,且移动槽为矩形结构;所述主体的两端两侧设有侧槽,且侧槽的内部为T形结构;所 述主体的顶端中间位置设有中槽,且中槽为T形结构;所述中槽的外端设有贯穿孔,且中槽 的内端设有旋转槽,并且旋转槽为中间凸起的圆柱形结构;所述中槽为可导向移动结构。 进一步的,所述连接槽包括有内槽,顶板;所述连接槽为T形结构,且连接槽的顶端 外侧设有插入口;所述连接槽的内部底端后侧设有内槽,且内槽为矩形结构;所述连接槽的 内部底端外侧设有矩形槽,且矩形槽的内部通过弹簧安装有顶板;所述顶板的顶端为楔形 结构;所述连接槽与内槽为可限位固定结构。 进一步的,所述缓冲件包括有接触轮;所述缓冲件的后端为T形结构,且缓冲件的 前端为弧形结构;所述缓冲件的前端内部通过连接轴安装有接触轮,且接触轮为橡胶材质; 所述缓冲件为可缓冲冲击力结构。 进一步的,所述辅助件包括有内板,连接块;所述辅助件为三角形结构,且辅助件 的两侧前端为弧形结构,并且辅助件的两端底部为楔形结构;所述辅助件的后端设有内板, 且内板为矩形板状结构;所述内板的后端中间位置设有连接块,且连接块为T形结构;所述 辅助件为可连接清障结构。 进一步的,所述顶块包括有调节杆;所述顶块的底部为T形结构,且顶块的顶端侧 边为楔形结构,并且顶块的底部中间位置设有螺纹孔;所述调节杆为圆柱形螺杆,且调节杆 通过螺纹安装在顶块的螺纹孔内部;所述调节杆的内端设有圆形结构的挡板,且调节杆的 外端设有操控杆;所述顶块为可移动支撑结构。 与现有技术相比,本发明具有如下有益效果: 在本装置中,设置了辅助件以及顶块,此处的辅助件是用来设在主体的前端的,使得本 装置在使用的时候,辅助件可以处于本装置的前端与船身的青苔接触,从而提前将青苔进 行清理,使得本装置吸附在船身使用的时候,可以提前将青苔清理,从而不影响本装置的移 动使用,而辅助件的前端为三角形结构,且两侧为弧形结构,是为了使得辅助件在跟随主体 移动的时候,辅助件的两侧以及前端可以将青苔有效的刮取,从而使青苔被向两侧清除,使 得主体在是用的时候可以流畅的移动,而内板则是用来处于辅助件的内端的,使得青苔被 清理之后,可以被内板挡住,避免青苔再次处于主体底部影响移动,而连接块则是用来嵌入 安装到连接槽的内部的,使得辅助件可以根据需求任意拆卸与安装,从而使本装置在使用 的时候,灵活性更高; 还有的是,顶块是用来安装在主体顶端中间位置的,使得顶块可以接收调节杆的动力 进行移动,使得顶块可以将连接板顶动到不同的高度,使得永磁块也可以处于不同的高度, 从而使本装置在使用的时候,可以任意调节吸附力度,从而将吸附力对本装置产生的阻力 减到最小,而顶块的底部为T形结构,是为了顶块的底端可以与中槽进行安装连接,从而使 顶块可以任意的调节位置,使得顶块处于不同位置的时候,可以使顶块侧边不同位置与连 接板进行接触,而顶块的顶端侧边为倾斜状结构,是为了使得顶块调节到不同的位置的时 4 CN 111572664 A 说 明 书 3/5 页 候,可以将连接板顶动到不同的高度,使得永磁块可以处于不同的高度进行吸附,从而使本 装置在使用的时候,可以与吸附面产生不同的吸附力,而调节杆则是用来调节顶块的位置 的,使得调节杆的内端以及挡板可以嵌入在旋转槽的内部进行旋转,从而使调节杆可以在 顶块的螺纹孔内部旋转,从而顶块可以便捷的移动调节位置,从而解决了在使用的时候,永 磁块的高度无法便捷的调节,永磁块在距离吸附面较近时,容易产生较大的移动阻力,使机 器人产生较多的损耗,且现有的磁吸附机器人行走底盘在对船身修补的时候,没有辅助清 理船身青苔或其他附着物的结构,船身在长时间使用之后容易产生青苔,而磁吸附机器人 在遇到青苔的时候,容易出现滑动导致无法移动的问题。 附图说明 图1是本发明的立体结构示意图。 图2是本发明的前端侧视结构示意图。 图3是本发明的主体局部截面结构示意图。 图4是本发明的连接槽截面结构示意图。 图5是本发明的缓冲件立体结构示意图。 图6是本发明的辅助件立体结构示意图。 图7是本发明的顶块立体结构示意图。 图8是本发明的连接板立体结构示意图。 图中,部件名称与附图编号的对应关系为: 1、主体;101、移动槽;102、侧槽;103、中槽;104、旋转槽;2、连接槽;201、内槽;202、顶 板;3、缓冲件;301、接触轮;4、辅助件;401、内板;402、连接块;5、顶块;501、调节杆;6、连接 板;601、受力板;602、永磁块。











