
技术摘要:
一种用于构建人工智能(AI)模型的方法。所述方法包括访问与用户的监测到的行为有关的数据。对所述数据进行分类,其中类别包括:标识与包括所述用户在内的一组用户有关的数据的客观数据类别,以及标识所述用户特有的数据的主观数据类别。访问客观数据,并且客观数据与包 全部
背景技术:
机器人现已存在。机器人随时会出于各种原因而与其人类所有者进行交互。这些 机器人一直以来都作为机器人助手而存在,包括被设计用来陪伴其所有者的机器人宠物。 尽管处理能力有限并且外观造型也受约束,但这些早期的机器人宠物仍然能够在一定程度 上自主地到处移动、感测即时环境、具有用于执行任务的可编程智能以及与其人类所有者 交互(例如,说话、吠叫、触摸等)。这些早期机器宠物的特征有计算机能力、视觉传感器系统 和发音器,以促进一个或多个特征,诸如智能、对象感测、个性和移动。例如,这些机器人宠 物可以与对象(例如,球)交互、与其所有者交流、与其环境交互、与其所有者玩耍、来回走动 等。而且,可以将这些机器人宠物编程为参与机器人足球联赛。此外,随着所有者通过交互 对机器人宠物进行培养,这些机器人宠物可能会成长并成熟。而且,这些机器人宠物可以基 于它们的培养方式形成个性。 这些早期的机器人已经准备好达到更高的能力水平,其中部分地包括提高的智 能、意识、协助、交互、个性和移动。 正是在这种背景下,出现了本公开的实施方案。
技术实现要素:
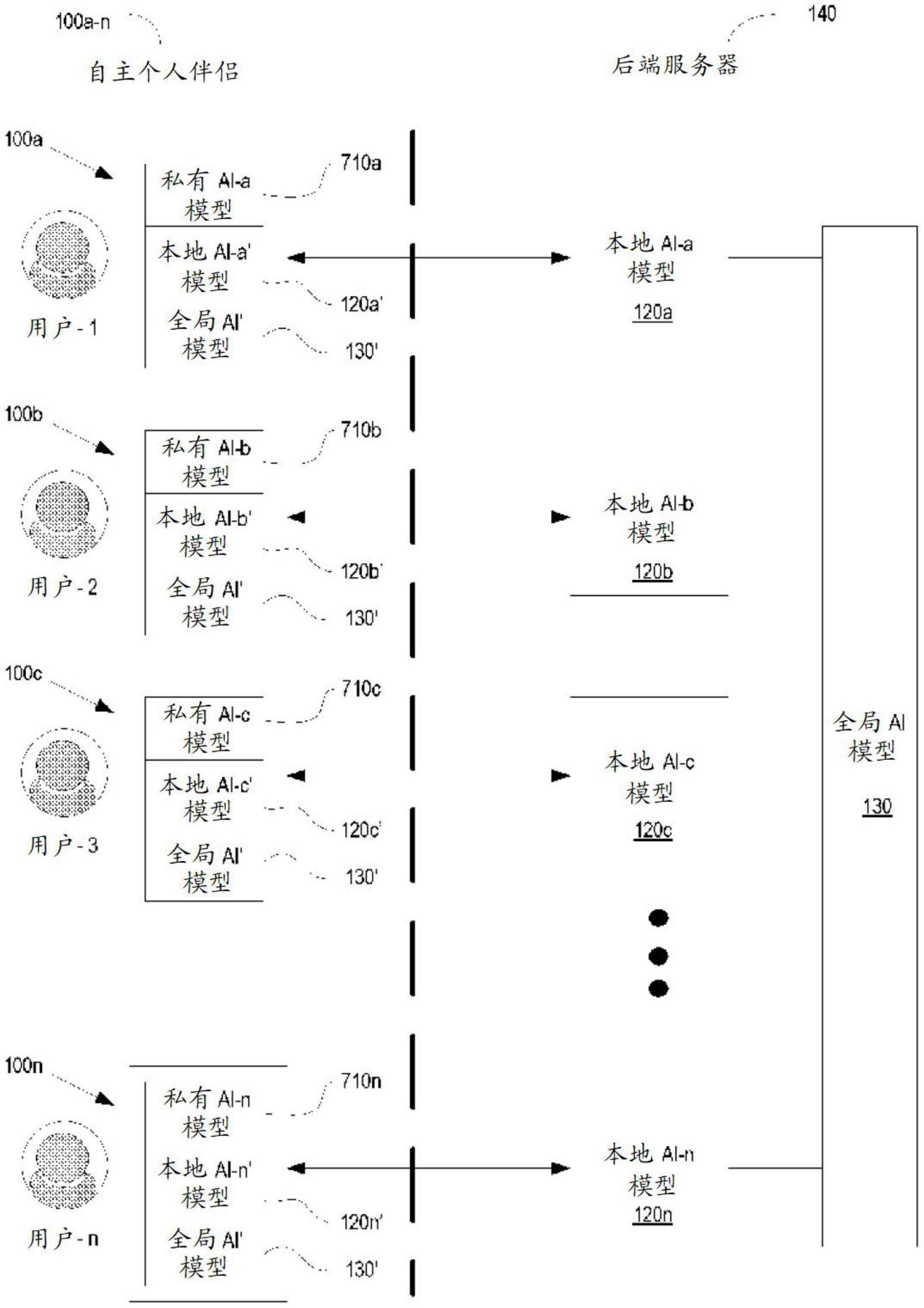
根据本公开的一个实施方案,本公开的实施方案涉及用于通过用户的人工智能 (AI)模型实现的自主个人伴侣的系统和方法。AI模型是通过深度学习引擎构建的,该引擎 被配置为向用户提供在情景上相关的个性化协助。AI模型可被配置为感知在不同专有操作 系统下操作的其他数字资产(例如,电话联系人、日历、电话、家庭自动化、游戏控制台等)并 与其交换数据。AI模型可以集成到移动平台中,并被配置为自主地移动以自我定位成最佳 地接收数据、收集数据、感测环境和传递数据。AI模型可以与后端服务器交互以进行处理, 其中AI模型可以在本地级别处理请求,或者在本地级别预处理请求,然后在后端服务器处 完全处理那些请求。 在一个实施方案中,公开了一种用于构建人工智能模型(AI)的方法,该AI模型使 向对应用户提供服务的自主个人伴侣富有个性。该方法包括访问与用户的监测到的行为有 关的数据。该方法包括按类别对数据进行分类,其中类别包括标识与包括该用户在内的一 组用户有关的数据的客观数据类别,以及标识该用户特有的数据的主观数据类别。该方法 包括访问与包括该用户在内的多个用户的监测到的行为有关的客观数据。该方法包括将用 户的客观数据、用户的主观数据以及多个用户的多个客观数据作为第一组输入提供给执行 AI的深度学习引擎。该方法包括确定在对第一组输入作出响应时预测用户行为的多种习得 模式。该方法包括构建用户的包括多种习得模式的本地AI模型。 5 CN 111602143 A 说 明 书 2/26 页 在另一个实施方案中,公开了一种非暂时性计算机可读介质,该非暂时性计算机 可读介质存储用于构建人工智能模型(AI)的计算机程序,该模型使向对应用户提供服务的 自主个人伴侣富有个性。该计算机可读介质包括用于访问与用户的监测到的行为有关的数 据的程序指令。该计算机可读介质包括:用于按类别对数据进行分类的程序指令,其中多个 类别包括:标识与包括该用户在内的一组用户有关的客观数据的客观数据类别,以及标识 该用户特有的主观数据的主观数据类别。该计算机可读介质包括用于访问与包括该用户在 内的多个用户的监测到的行为有关的客观数据的程序指令。该计算机可读介质包括用于将 用户的客观数据、用户的主观数据和多个用户的多个客观数据作为第一组输入提供给深度 学习引擎的程序指令,该深度学习引擎被配置为执行人工智能(AI)。该计算机可读介质包 括用于确定在对第一组输入作出响应时预测用户行为的第一多种习得模式的程序指令。该 计算机可读介质包括用于构建用户的包括第一多种习得模式的本地AI模型的程序指令。 在又一个实施方案中,公开了一种计算机系统,其中该计算机系统包括处理器和 耦合到处理器并且存储有指令的存储器,指令在由计算机系统执行时,使计算机系统执行 一种方法。由计算机系统执行的方法包括访问与用户的监测到的行为有关的数据。该方法 包括:按类别对数据进行分类,其中多个类别包括:标识与包括该用户在内的一组用户有关 的客观数据的客观数据类别,以及标识该用户特有的主观数据的主观数据类别。该方法包 括访问与包括该用户在内的多个用户的监测到的行为有关的客观数据。该方法包括将用户 的客观数据、用户的主观数据和多个用户的多个客观数据作为第一组输入提供给深度学习 引擎,该深度学习引擎被配置为执行人工智能(AI)。该方法包括确定在对第一组输入作出 响应时预测用户行为的第一多种习得模式。该方法包括构建用户的包括第一多种习得模式 的本地AI模型。 通过以下结合附图的详细描述,本公开的其他方面将变得显而易见,所述附图通 过示例的方式说明本公开的原理。 附图说明 通过参考以下结合附图的描述可以最好地理解本公开,在附图中: 图1A是根据本公开的一个实施方案的通过用户的人工智能(AI)模型实现的自主 个人伴侣的图示。 图1B示出了根据本公开的一个实施方案的用于构建用户的AI模型的示例神经网 络,其中AI模型用于实现用户的自主个人伴侣。 图2示出了根据本公开的一个实施方案的支持通过用户的AI模型实现的自主个人 伴侣的系统。 图3A是根据本公开的一个实施方案的通过用户的AI模型实现的自主个人伴侣的 框图。 图3B示出了可用于执行本公开的各种实施方案的各方面的示例装置100的部件。 图4A示出了根据本公开的一个实施方案的支持玩游戏应用程序的用户的玩游戏 过程(game play)的自主个人伴侣。 图4B示出了根据本公开的一个实施方案的由图4A中介绍的用户玩的游戏应用程 序的三维(3D)游戏世界与用户的物理环境的集成,其中自主个人伴侣被配置为响应于用户 6 CN 111602143 A 说 明 书 3/26 页 的注视方向而将3D游戏世界的一部分投射到物理环境中。 图4C示出了根据本公开的一个实施方案的在图4A至图4B中介绍的游戏应用程序 的3D游戏世界的集成的另一示例,其中游戏应用程序的3D游戏世界的扩展部分被投射在显 示器旁边,其中显示器示出游戏应用程序的主视图,其中扩展部分示出3D游戏世界的一部 分,或者为游戏应用程序提供补充信息。 图5示出了根据本公开的一个实施方案的由第一用户使用头戴式显示器(HMD)玩 的游戏应用程序的3D虚拟现实(VR)世界与物理环境的集成,其中自主个人伴侣被配置为响 应于用户的注视方向而将VR游戏世界的一部分投射到物理环境中,以允许旁观者并行地参 与第一用户的VR游戏世界的体验。 图6A示出了根据本公开的一个实施方案的通过用户的AI模型实现的针对用户的 自主个人伴侣的示例性形式。 图6B示出了根据本公开的实施方案的示例性自主个人伴侣,所述自主个人伴侣被 配置有一系列能力,其中部分地包括图像的投射,对附近环境的感测以及辅助声音的提供。 图6C示出了根据本公开的一个实施方案的示例性自主个人伴侣,所述自主个人伴 侣包括配置有一个或多个特征(例如,图像捕获和图像投射)的无人机组件。 图6D示出了根据本公开的一个实施方案的示例性自主个人伴侣,所述自主个人伴 侣包括配置有一个或多个特征(例如,图像捕获和图像投射)的旋转顶部。 图6E示出了根据本公开的一个实施方案的包括一个或多个附件(appendage)的示 例性自主个人伴侣,其中附件可以采取控制器的形式,其中附件/控制器可以从伴侣上移 除。 图6F至图6H示出了根据本公开的实施方案的用于自主个人伴侣的替代外观造型。 图7示出了根据本公开的一个实施方案的用于多个用户的各种AI模型以及可以实 现这些AI模型的位置。 图8A示出了根据本公开的一个实施方案的对应用户的一个或多个AI模型之间的 关系。 图8B示出了根据本公开的一个实施方案的在对应用户的AI模型内定义的各种分 支,其中每个分支可以通向用户的子AI模型。 图9A示出了根据本公开的一个实施方案的针对对应用户可能监测到的不同类型 的用户动作。 图9B示出了根据本公开的一个实施方案的使用图9A中介绍的不同类型的用户动 作来构建各种AI模型的方式。 图10是示出根据本公开的一个实施方案的用于构建对应用户的AI模型的方法的 流程图。











