
技术摘要:
本发明公开了MBR曝气集成利用系统,用于解决现有的污水处理系统没有对曝气进行回流利用,造成大量曝气直接排出,造成资源浪费的问题,包括污水处理箱,所述污水处理箱的内部安装有MBR膜组件,污水处理箱的内部位于MBR膜组件的下方安装有曝气管,曝气管的一端与连接气管 全部
背景技术:
在污水处理,水资源再利用领域,MBR又称膜生物反应器,是一种由膜分离单元与 生物处理单元相结合的新型水处理技术。按照膜的结构可分为平板膜、管状膜和中空纤维 膜等,按膜孔径可划分为超滤膜、微滤膜、纳滤膜、反渗透膜等。 在使用过程中,只要MBR膜组件浸没到待处理水中,曝气就要一直持续的,其主要 作用是通过曝气冲刷膜表面,清洗膜表面污染物,降低膜污染;而现有的污水处理系统没有 对曝气进行回流利用,造成大量曝气直接排出,造成资源浪费。
技术实现要素:
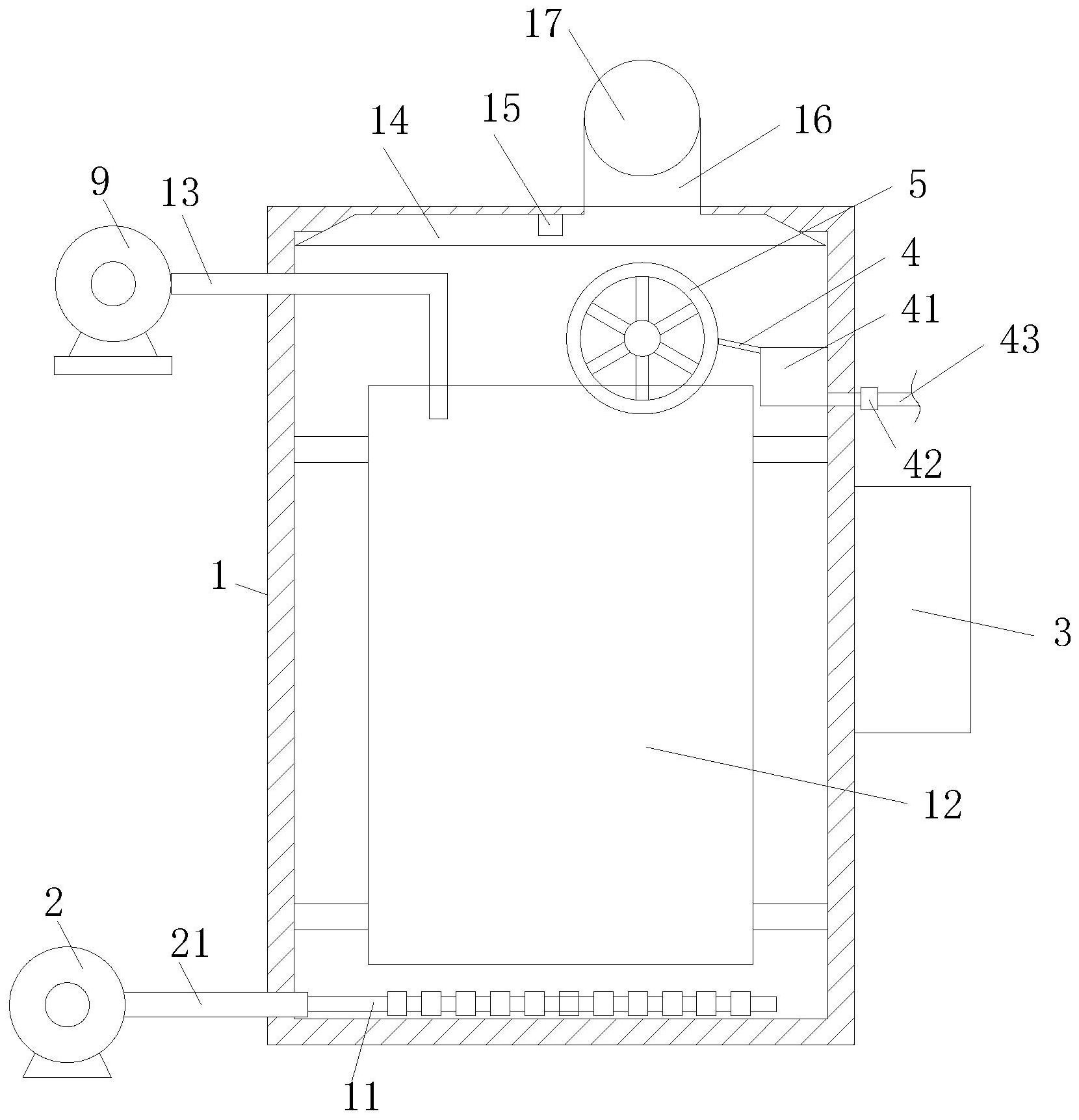
本发明的目的就在于为了解决现有的污水处理系统没有对曝气进行回流利用,造 成大量曝气直接排出,造成资源浪费的问题,而提出MBR曝气集成利用系统;本发明通过曝 气收集罩收集曝气,数据分析模块用于对压力值和水位值进行分析,当执行模块接收到曝 气利用指令时,则执行模块控制第一电磁阀和第二电磁阀打开,收集的曝气通过排气管排 出,曝气排出的过程吹动扇叶转动,扇叶带动第一中心杆转动,第一中心杆通过第一皮带 盘、第二皮带盘和三角皮带带动第二中心杆转动,从而通过第二中心杆带动圆盘架转动,进 而通过圆盘架上的水槽转动,通过水槽将MBR膜组件内的水送入水箱内,通过出水管输送至 好氧池或缺氧池,通过对曝气进行回流利用,将MBR膜组件内水送至好氧池或缺氧池内;将 MBR膜池的出水要通过水泵抽出,利用曝气的目的是把没有经过膜的泥水混合液回流到前 端好氧池或缺氧池,避免现有的污水处理系统没有对曝气进行回流利用,造成大量曝气直 接排出,造成资源浪费; 本发明的目的可以通过以下技术方案实现:MBR曝气集成利用系统,包括污水处理 箱,所述污水处理箱的内部安装有MBR膜组件,污水处理箱的内部位于MBR膜组件的下方安 装有曝气管,曝气管的一端与连接气管的一端连接,连接气管的另一端贯穿污水处理箱位 于污水处理箱外,且连接气管的另一端与鼓风机的排风口处贯通连接; 所述污水处理箱的内部顶壁安装有曝气收集罩,曝气收集罩的顶部贯通连接有竖 管的一端,竖管的另一端与排气管的一端贯通连接,排气管的另一端通过固定架安装有第 一中心杆,第一中心杆的一端位于排气管内且第一中心杆的一端固定安装有扇叶,第一中 心杆的另一端焊接有第一皮带盘;排气管上安装有第二电磁阀; 所述MBR膜组件的上方安装有圆盘架,圆盘架上均匀开设有若干个水槽,圆盘架的 一侧中心处焊接有第二中心杆的一端,第二中心杆的另一端贯穿污水处理箱位于污水处理 箱外,且第二中心杆与污水处理箱的连接处安装有第一滚珠轴承;第二中心杆的另一端焊 接有第二皮带盘,第一皮带盘与第二皮带盘通过三角皮带传动连接; 所述圆盘架的一侧安装有弧形收水管的一端,弧形收水管的另一端与水箱的一端 5 CN 111592094 A 说 明 书 2/7 页 贯通连接;水箱通过螺丝固定安装在污水处理箱的内侧壁,且水箱的一侧贯通连接有出水 管的一端,出水管的另一端贯穿污水处理箱位于污水处理箱外,且出水管上安装有第一电 磁阀; 所述MBR膜组件内安装有抽水管的一端,抽水管的另一端贯穿污水处理箱的侧壁 且抽水管的另一端与抽水泵贯通连接。 所述固定架包括第二滚珠轴承,第二滚珠轴承的环形内壁通过焊接固定套接在第 一中心杆上,第二滚珠轴承的环形外壁上对称焊接有两个三角板,三角板的一端一体成形 有弧形板,弧形板上开设有螺栓孔,弧形板通过紧固螺栓固定在排气管上。 优选的,所述曝气收集罩的内部安装有气压传感器,MBR膜组件的内部安装有水位 传感器;所述污水处理箱的一侧侧壁安装有电控箱,电控箱的内部安装有模数转换模块、数 据分析模块、执行模块、供电模块、数据采集模块、数据处理模块、校准分配模块和数据存储 模块; 所述气压传感器用于采集污水处理箱内部曝气的压力信号并将压力信号传输到 模块转换模块,所述水位传感器用于采集MBR膜组件内的水位信号并将数位信号传输到模 数转换模块; 所述模数转换模块用于将接收的压力信号和水位信号转换成压力值和水位值并 将其发送至数据分析模块; 所述数据分析模块用于对压力值和水位值进行分析,具体分析步骤如下: 步骤一:设定第一压力阈值记为FY;将接收的压力值记为Fi;设定接收的水位值记 为Pi;设定水位阈值记为PY; 步骤二:当Fi>FY,且Pi≤PY,则生成曝气利用指令,并将曝气利用指令发送至执行 模块; 步骤三:当Fi>FY,且Pi>PY,则生成曝气抽水指令,并将曝气抽水指令发送至执行 模块。 优选的,所述执行模块用于接收曝气利用指令和曝气抽水指令并进行处理,具体 处理过程如下: a:当执行模块接收到曝气利用指令时,则执行模块控制第一电磁阀和第二电磁阀 打开,同时执行模块发送采集指令至气压传感器,气压传感器接收到采集指令后采集压力 信号并通过模数转换模块转换成压力值发送至执行模块;当压力值小于第二压力阈值FZ; 则执行模块控制第一电磁阀和第二电磁阀关闭; b:当执行模块接收到曝气抽水指令时,则执行模块控制第一电磁阀和第二电磁阀 打开,同时控制抽水泵工作,执行模块发送采集指令至气压传感器和水位传感器,气压传感 器接收到采集指令后采集压力信号并通过模数转换模块转换成压力值发送至执行模块;当 压力值小于第二压力阈值FZ;则执行模块控制第一电磁阀和第二电磁阀关闭;水位传感器 接收到采集指令后采集水位信号并通过模数转换模块转换成水位值发送至执行模块;当水 位值小于第二水位阈值PZ,则控制抽水泵停止工作,其中,PZ











