
技术摘要:
本发明公开一种桁架自动放置专机及桁架自动放置方法,桁架自动放置专机包括:模台;桁架输送装置,设置于所述模台侧边,桁架由所述桁架输送装置输送至所述模台侧边;桁架放置装置,包括空间移动架和连接在所述空间移动架上的机械手,所述机械手于所述桁架输送装置上拿 全部
背景技术:
在装配式建筑预构件生产领域,桁架放置作为预构件生产中的重要工序,目前国 内大部分企业以手工操作为主。实际施工中,桁架具有规格多、数量多、质量大等特点,因此 传统作业方式因其工作效率低、劳动强度大、布置精度差等缺点,已经成为制约行业发展的 瓶颈。同时,人工操作过程中的安全事故也时有发生。如今随着自动化、数字化、信息化、智 能化等新技术的快速发展,可促使该行业的作业模式发生重大改变。
技术实现要素:
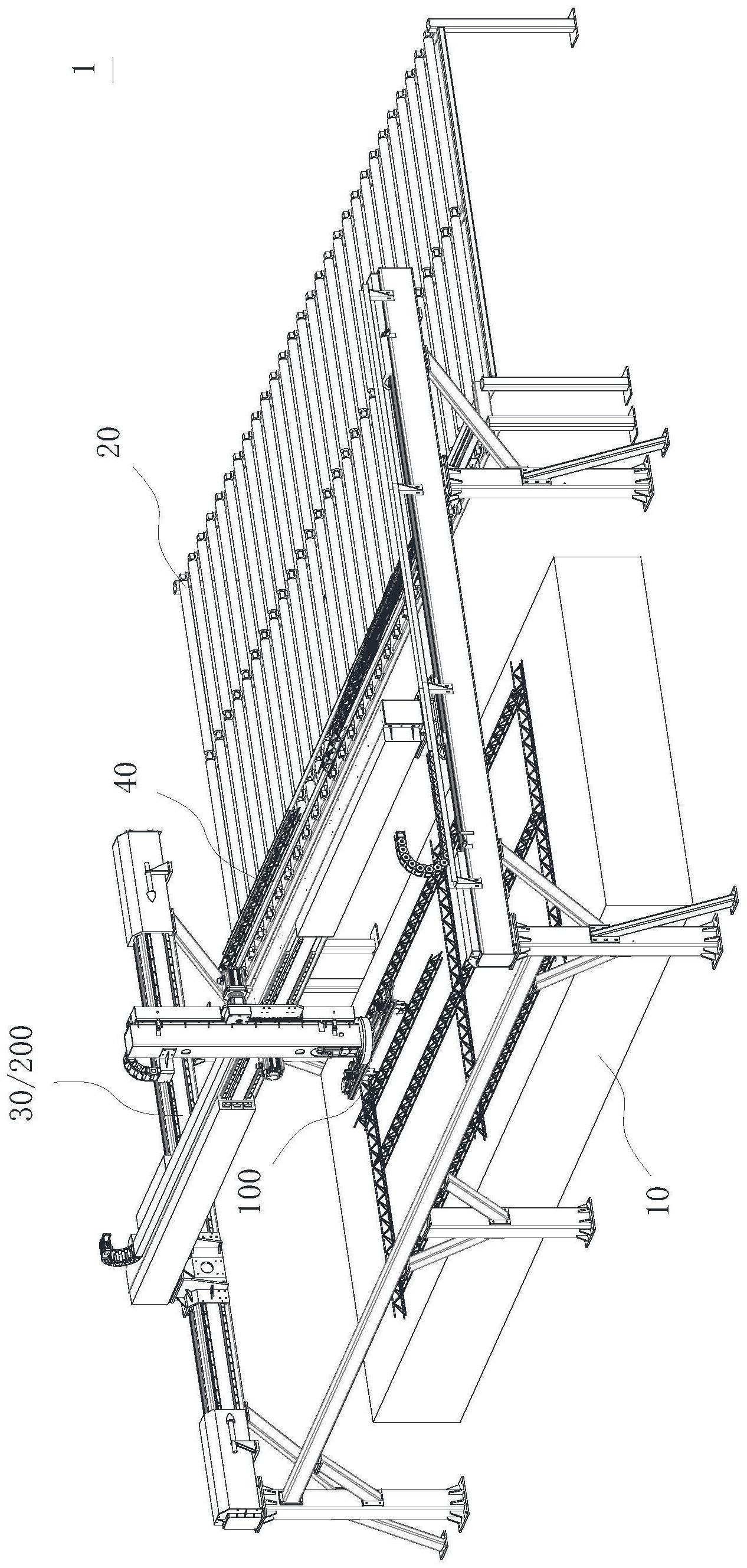
本发明的目的是提供一种桁架自动放置专机及桁架自动放置方法。 为了实现上述目的,本发明的桁架自动放置专机包括:模台;桁架输送装置,设置 于所述模台侧边,桁架由所述桁架输送装置输送至所述模台侧边;桁架放置装置,包括空间 移动架和连接在所述空间移动架上的机械手,所述机械手于所述桁架输送装置上拿取桁架 并放置于所述模台上的预设位置。 上述的桁架自动放置专机的一实施方式中,所述桁架输送装置包括导向件。 上述的桁架自动放置专机的一实施方式中,所述导向件包括第一导杆和第二导 杆,所述第一导杆和第二导杆呈喇叭形。 上述的桁架自动放置专机的一实施方式中,所述第一导杆和第二导杆分别由多个 线性排列的滚轮组成。 上述的桁架自动放置专机的一实施方式中,所述空间移动架包括齿轮齿条传动机 构,所述齿轮齿条传动机构包括伺服电机以及相啮合的主动齿轮和齿条,所述伺服电机驱 动所述主动齿轮于所述齿条上移动。 上述的桁架自动放置专机的一实施方式中,所述齿轮齿条传动机构还包括辅助齿 轮和齿轮张紧部件,所述辅助齿轮与所述齿条相啮合,所述齿轮张紧部件张紧所述辅助齿 轮以消除所述主动齿轮与所述齿条的齿间隙。 上述的桁架自动放置专机的一实施方式中,所述机械手包括转动轴、连接在所述 转动轴上的导轨以及连接在所述导轨上的夹爪。 上述的桁架自动放置专机的一实施方式中,所述机械手还包括夹爪自适应控制机 构,所述夹爪自适应控制机构控制所述夹爪沿所述导轨移动一自适应调整距离。 上述的桁架自动放置专机的一实施方式中,所述自适应调整距离小于桁架的焊接 步距。 上述的桁架自动放置专机的一实施方式中,所述机械手还包括长度调节机构,所 4 CN 111571570 A 说 明 书 2/5 页 述长度调节机构包括棘轮齿条、棘轮勾爪、第一弹簧和第二弹簧,所述棘轮勾爪连接在所述 导轨上,所述棘轮齿条连接在所述夹爪和棘轮勾爪之间,所述第一弹簧连接在所述棘轮勾 爪和导轨之间,所述第二弹簧连接在所述夹爪和导轨之间。 本发明的桁架自动放置方法包括如下步骤: S100,桁架由桁架输送机构输送至模台侧边; S200,机械手拿取桁架输送机构上的桁架,并放置于模台上的预设位置。 上述的桁架自动放置方法的一实施方式中,所述步骤S100中包括:桁架由桁架输 送机构上的导向件提供取料基准和导向。 上述的桁架自动放置方法的一实施方式中,所述步骤S200中还包括:机械手通过 空间移动架三自由度方向移动。 上述的桁架自动放置方法的一实施方式中,所述步骤S200中还包括:机械手采用 齿轮齿条结构沿一方向移动,并通过设置与齿条相啮合的张紧的辅助齿轮,以消除主动齿 轮与齿条的齿间隙。 上述的桁架自动放置方法的一实施方式中,所述步骤S200还包括:机械手对桁架 进行试抓举,如果抓举失败,机械手的夹爪整体位移一小于桁架的焊接步距的距离后继续 抓举。 本发明的有益功效在于,本发明的桁架自动放置专机及方法可实现预构件桁架的 智能化拾取、批量化布置,可大幅缩短生产节拍、降低劳动强度、提升布模精度、提高生产效 率与作业安全性。 以下结合附图和具体实施例对本发明进行详细描述,但不作为对本发明的限定。 附图说明 图1为本发明的桁架自动放置专机的一实施例的立体结构图; 图2为本发明的桁架自动放置专机的桁架输送装置的一实施例的工作过程图; 图3为图2的A处放大图; 图4为本发明的桁架自动放置专机的桁架放置装置的一实施例的立体结构图; 图5为图4的B处放大图; 图6为本发明的桁架自动放置专机的机械手的一实施例的立体结构图; 图7为图6的C处放大图; 图8为本发明的桁架自动放置专机的机械手的自适应控制的工作示意图。 其中,附图标记 1:桁架自动放置专机 10:模台 20:桁架输送装置 30:桁架放置装置 40:桁架 100:机械手 110:转动轴 120:导轨 5 CN 111571570 A 说 明 书 3/5 页 130:夹爪 131:到位检测传感器 140:长度调节机构 141:棘轮齿条 142:棘轮勾爪 143:第一弹簧 144:第二弹簧 150:夹爪自适应控制机构 200:空间移动架 210:伺服电机 220:主动齿轮 230:齿条 240:辅助齿轮 250:齿轮张紧部件 300:导向件 300a:滚轮 310:第一导杆 320:第二导杆











