
技术摘要:
本发明提供了一种多功能巡视器半物理仿真系统和方法,包括运动跟随装置、六维力传感器单元、模拟地外星表地形沙盘以及通讯接口单元;所述运动跟随装置对巡视器的运动进行跟随,并进行负载调节;所述六维力传感器单元连接在运动跟随装置的末端,进行反馈负载信息;所述 全部
背景技术:
随着我国深空探测工程的逐步开展,地外星表巡视器的开发成为该领域工程中的 最重要一环。巡视器自身是一个复杂的系统,同时其面对的环境为复杂而未知的环境,为了 保证巡视器可以在目标星表面正常行驶,在发射前对其样机开展半物理仿真是极其重要 的。同时,在地外星表探测领域,开发多种行进模式的大范围巡视器正成为一种新的趋势。 这也对半物理仿真系统提出了要求,能够完成多种行进模式的仿真以及多种工况的仿真是 十分重要的。 目前现有的针对巡视器的半物理仿真系统大多局限为单一功能的仿真系统,比如 进行低重力行进仿真的系统或者验证轮土力学性能的系统等等。现有针对巡视器的低重力 仿真系统主要采用悬吊的形式进行重力卸载,其设备往往庞大且能够仿真的工况集中在低 重力行进的移动性能验证以及自主导航上。现有的验证轮土力学性能的系统主要形式为单 轮行进的系统,同样也存在功能单一的特点。 未经检索到与本申请相似的现有技术,与本申请较接近的专利文献CN105252539B 公开的基于加速度传感器抑制并联平台振动控制系统及方法,包括三个并联分支机构,每 个并联分支机构包括三相交流伺服电机、减速器、主动杆、被动杆;三相交流伺服电机安装 在固定平台上,呈等边三角形分布,三相交流伺服电机连接减速器,减速器通过转动轴连接 主动杆,主动杆的另一端通过转动轴连接从动杆,从动杆的另一端通过转动轴连接动平台, 动平台呈等边三角形;采用增量式编码器测试主动关节位置,采用加速度传感器检测并联 平台动平台和主动杆的加速度,根据主动关节位置信息和加速度信息综合设计控制器,抑 制并联平台在运动过程中的振动或点定位时的自激振动。
技术实现要素:
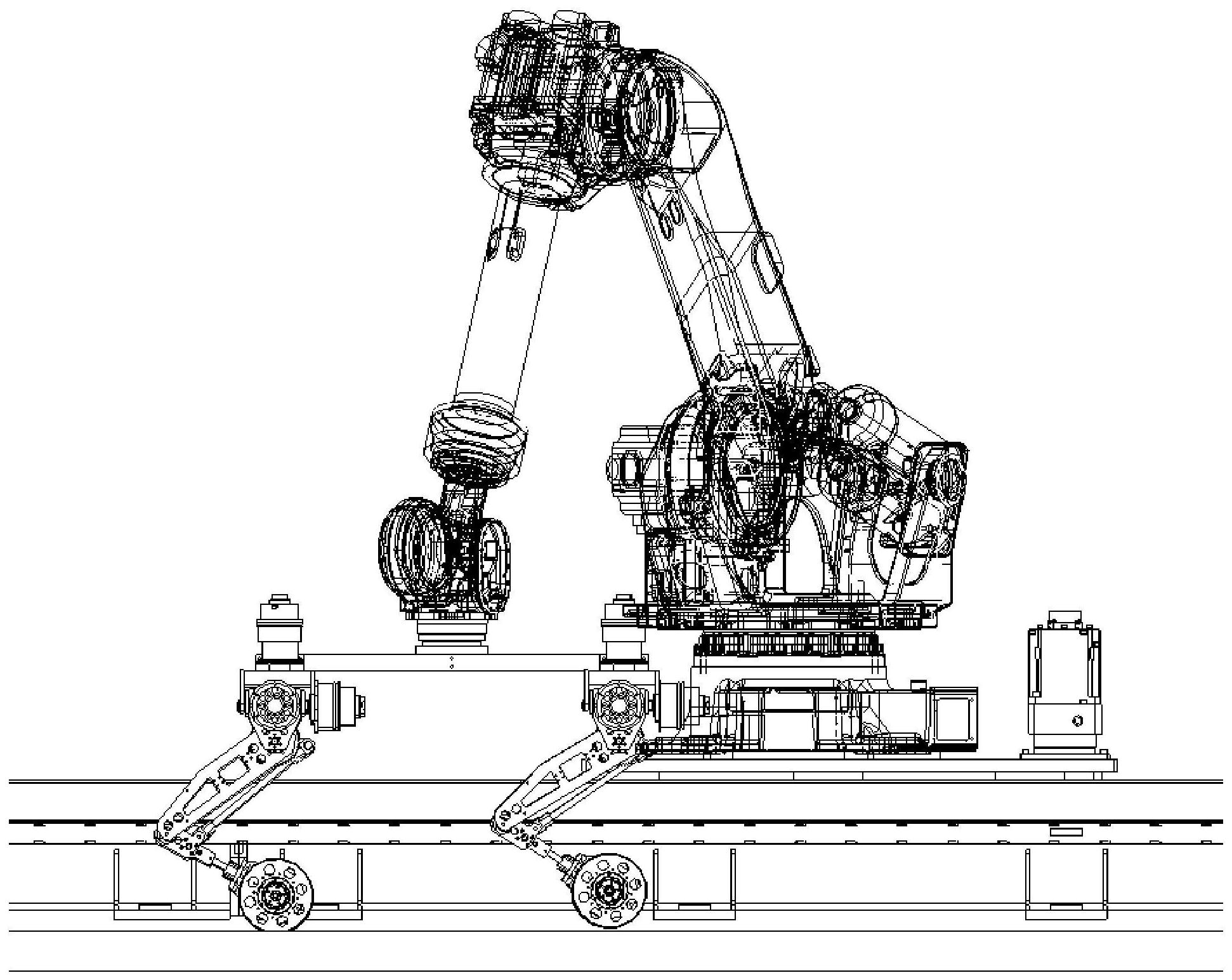
针对现有技术中的缺陷,本发明的目的是提供一种多功能巡视器半物理仿真系统 和方法。 根据本发明提供的一种多功能巡视器半物理仿真系统,包括运动跟随装置、六维 力传感器单元、模拟地外星表地形沙盘以及通讯接口单元; 所述运动跟随装置对巡视器的运动进行跟随,并进行负载调节; 所述六维力传感器单元连接在运动跟随装置的末端,进行反馈负载信息; 所述模拟地外星表地形沙盘用于模拟目标星环境; 通讯接口单元将移动跟随装置中的七个驱动自由度的控制对外开放,完成与地外 星表巡视器样机的协调通讯。 优选地,所述运动跟随装置包括六自由度操作臂和伺服滑轨,六自由度操作臂的 4 CN 111596569 A 说 明 书 2/6 页 基座固连在伺服滑轨的基座上,形成整体上跟随控制伺服滑轨移动的移动平台运动。 优选地,所述六自由度操作臂采用串联机械臂形式,并且末端设置有与六位力传 感器连接的第一机械接口。 优选地,所述伺服滑轨为单自由度滑动导轨,通过伺服电机驱动,能够实现精确位 置控制,并且在移动平台上设置有用于固连六自由度操作臂的第二机械接口。 优选地,所述六维力传感器单元固连在运动跟随装置的六自由度操作臂的末端, 可以实现三维力和三维力矩的测量。 优选地,所述六维力传感器单元设置有通用的用来连接地外星表巡视器样机的第 三机械接口。 优选地,所述模拟地外星表地形沙盘为根据实验目标环境构建的长方形非构造地 形沙盘,平行地布置在伺服滑轨的一侧。 根据本发明提供的一种多功能巡视器半物理仿真方法,包括巡视器着陆仿真实验 步骤,所述巡视器着陆仿真实验步骤包括: 步骤一,首先将地外星表巡视器样机通过六位力传感器模块的机械机接口与多功 能巡视器半物理仿真系统固连,通过通讯接口模块将多功能巡视器半物理仿真系统中的所 有驱动自由度交由地外星表巡视器样机控制器协调控制; 步骤二,通过对仿真工况的分析,驱动运动跟随装置中的六自由度操作臂将地外 星表巡视器样机调整到合适的高度并且保持悬空; 步骤三,通过对仿真工况的分析,驱动运动跟随装置中的伺服滑轨将地外星表巡 视器样机调节到模拟地外星表地形沙盘中目标着陆区域的上方或者侧上方; 步骤四,通过控制运动跟随装置中的六自由度操作臂,驱动外星表巡视器按照着 陆轨迹完成在模拟地外星表地形沙盘上的着陆模拟,并且在这一过程中根据需要对重力负 载进行部分消除或者补偿; 步骤五,在着陆模拟过程中,对地外星表巡视器样机以及多功能巡视器半物理仿 真系统中的各项传感器的数据进行采集并用于后期处理和分析; 步骤六,将地外星表巡视器样机重新放置在地面上以后,打开机械接口,并且使多 功能巡视器半物理仿真系统整体调回初始状态,结束半物理仿真实验。 优选地,所述的多功能巡视器半物理仿真方法,还包括低重力行进仿真实验步骤, 所述低重力行进仿真实验步骤包括: 步骤一,将地外星表巡视器样机通过六位力传感器模块的机械机接口与多功能巡 视器半物理仿真系统固连,通过通讯接口模块将多功能巡视器半物理仿真系统中的所有驱 动自由度交由地外星表巡视器样机控制器协调控制; 步骤二,驱动运动跟随装置中的六自由度操作臂将地外星表巡视器样机调整到合 适的高度并且保持悬空; 步骤三,通过对仿真工况的分析,驱动运动跟随装置中的伺服滑轨将地外星表巡 视器样机调节到模拟地外星表地形沙盘一段的上方,随后将该样机放置在模拟地外星表地 形沙盘上,保证样机所有轮与沙盘的接触; 步骤四,通过对仿真工况的分析,驱动运动跟随装置中的六自由度机械臂对重力 负载进行部分消除; 5 CN 111596569 A 说 明 书 3/6 页 步骤五,保持重力负载部分消除的情况下,驱动地外星表巡视器样机沿着模拟地 外星表地形沙盘地形前进,并且在这一过程中,驱动运动跟随装置跟随该样机的运动,在这 一过程中,记录地外星表巡视器以及多功能巡视器半物理仿真系统中各项传感器的数据用 于后续处理和分析; 步骤六,将地外星表巡视器样机重新放置在地面上以后,打开机械接口,并且使多 功能巡视器半物理仿真系统整体调回初始状态,结束半物理仿真实验。 优选地,所述的多功能巡视器半物理仿真方法,还包括轮土接触仿真实验步骤,所 述轮土接触仿真实验步骤包括: 步骤一,将地外星表巡视器的单轮实验单元样机通过六位力传感器模块的机械机 接口与多功能巡视器半物理仿真系统固连,通过通讯接口模块将多功能巡视器半物理仿真 系统中的所有驱动自由度交由地外星表巡视器的单轮实验单元样机控制器协调控制; 步骤二,驱动运动跟随装置将地外星表巡视器的单轮实验单元样机放置在模拟地 外星表地形沙盘中平整区域上; 步骤三,通过对仿真工况的分析,驱动运动跟随装置中的六自由度机械臂对地外 星表巡视器的单轮实验单元样机的压力负载进行调节; 步骤四,保持压力负载的情况下,驱动外星表巡视器的单轮实验单元样机沿着模 拟地外星表地形沙盘地形前进,并且在这一过程中,驱动运动跟随装置跟随该样机的运动, 在这一过程中,记录外星表巡视器的单轮实验单元样机以及多功能巡视器半物理仿真系统 中各项传感器的数据用于后续处理和分析; 步骤五,调节地外星表巡视器的单轮实验单元样机的压力负载,重复步骤四,直到 获得待测压力负载范围内充足的实验数据为止; 步骤六,将地外星表巡视器的单轮实验单元样机重新放置在地面上以后,打开机 械接口,并且使多功能巡视器半物理仿真系统整体调回初始状态,结束半物理仿真实验。 与现有技术相比,本发明具有如下的有益效果: 1、本发明可以真实地再现巡视器在地外星表着陆以及在低重力环境中行进的情 况,并且拥有系统刚度高,响应快,运动跟随和负载调节的精度好的优点。 2、本发明是可以完成包括巡视器着陆、低重力行进以及轮土力学模拟等的多功能 半物理仿真系统。通过采用相应的实验方法,本发明可以对以上过程开展半物理仿真,适用 于拥有多模式行进,大范围巡视特点的巡视器。 附图说明 通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、 目的和优点将会变得更明显: 图1为本发明的示意图。 图2为本发明实施例多功能巡视器半物理仿真系统示意图。 图中示出:运动跟随装置1;六维力传感器单元2;地外星表巡视器样机3;模拟地外 星表地形沙盘4;运动跟随装置中的六自由度操作臂5;运动跟随装置中的伺服滑轨6。 6 CN 111596569 A 说 明 书 4/6 页











