
技术摘要:
本发明公开了一种基于多种网络特征的闭环检测方法,在环境变化情况下具有更好的鲁棒性能,采用多种网络特征作为图像特征描述子,利用不同神经网络模型的不同网络输出层特征组合的方式表征图像,使得图像描述子能够携带更丰富更精准的信息,从而提高整个闭环检测算法的 全部
背景技术:
SLAM是“Simultaneous Localization And Mapping”的缩写,可译为同步定位与 建图。概率SLAM问题(the probabilistic SLAM problem)起源于1986年的IEEE Robotics and Automation Conference大会上,研究人员希望能将估计理论方法(estimation- theoretic methods)应用在构图和定位问题中。SLAM最早被应用在机器人领域,其目标是 在没有任何先验知识的情况下,根据传感器数据实时构建周围环境地图,同时根据这个地 图推测自身的定位。近年来,视觉SLAM在机器人、自动驾驶汽车/无人机、AR/VR领域得到了 广泛的应用。 一个完整的视觉SLAM系统需要几个关键模块,如数据处理、视觉里程计、后端优 化、地图构建和闭环检测。对于基于各种传感器的移动机器人来说,闭环检测的确是一个至 关重要的部分。一个好的视觉SLAM系统,它需要闭环检测技术来帮助它减少视觉里程计带 来的累计误差。当我们检测到闭环,将其获得的信息提供给后端进行处理,能够显著地减少 机器人移动过程中的累积误差从而提高后端优化处理的准确性,因此闭环检测对于整个 SLAM系统精度与鲁棒性的提升有着非常重要的意义。 对于闭环检测来说,特征提取是非常关键的一部分,主要有两种方式实现,一是传 统的方式,基于各种传统的图像描述子技术。例如使用局部图像特征(SIFT,SURF和ORB的 Bag-of-Words、Fisher向量和VLAD)。其他方法使用全局图像特征,例如GIST。其中,Cummins 等提出的着名的FAB-MAP,通过提取SURF特征并构造一个视觉词典(BOW模型),机器人将在 获取的图像中用视觉词典检索在运行过程中获取字符,以获得两个地方之间的相似性,计 算闭环的概率来实现闭环检测。另一种是基于神经网络的方式,由于传统的方式提取的特 征是根据人的专业知识和先验知识设计的,不能很好地代表图像,它们也有一定的局限性, 泛化性能不是很好。近十年来,深度学习迅速兴起,近年来取得了巨大的进步。最近的研究 证明了深度学习在各种计算机视觉任务中的显著成功,进一步促使研究人员开始展开了基 于神经网络在闭环检测方面的研究。目前,研究人员在闭环检测中使用了两种深度学习方 法。一是自动编码器的方式,利用自动编码器训练,以学习特征表示,并通过使用相似性或 差异矩阵找到闭环。另一个是在光照变化的环境中,预先训练的神经网络模型可以提取特 征并优于最新的手工提取的特征。例如,Gao X等人提出了训练堆叠自动编码器来学习特征 表示。在稀疏自动编码器的基础上,Hu Han等人将输出层的激活函数改为identity函数,解 决了输入样本需要缩放而不适用于彩色图像的问题。同年,Yi Hou等人第一次提出使用卷 积神经网络来实现闭环检测,并且有较好的检测效果。2018年,Xia Y等人将深度学习经典 框架和传统闭环检测方法作比较,得出了无论在精度还是处理时间上,深度学习方法都比 传统算法具有更好的闭环检测性能的结果。然而,现有的闭环检测方法只使用单个神经网 4 CN 111582447 A 说 明 书 2/5 页 络的单层网络表征图像,使得图像表示不丰富,进而影响算法性能。
技术实现要素:
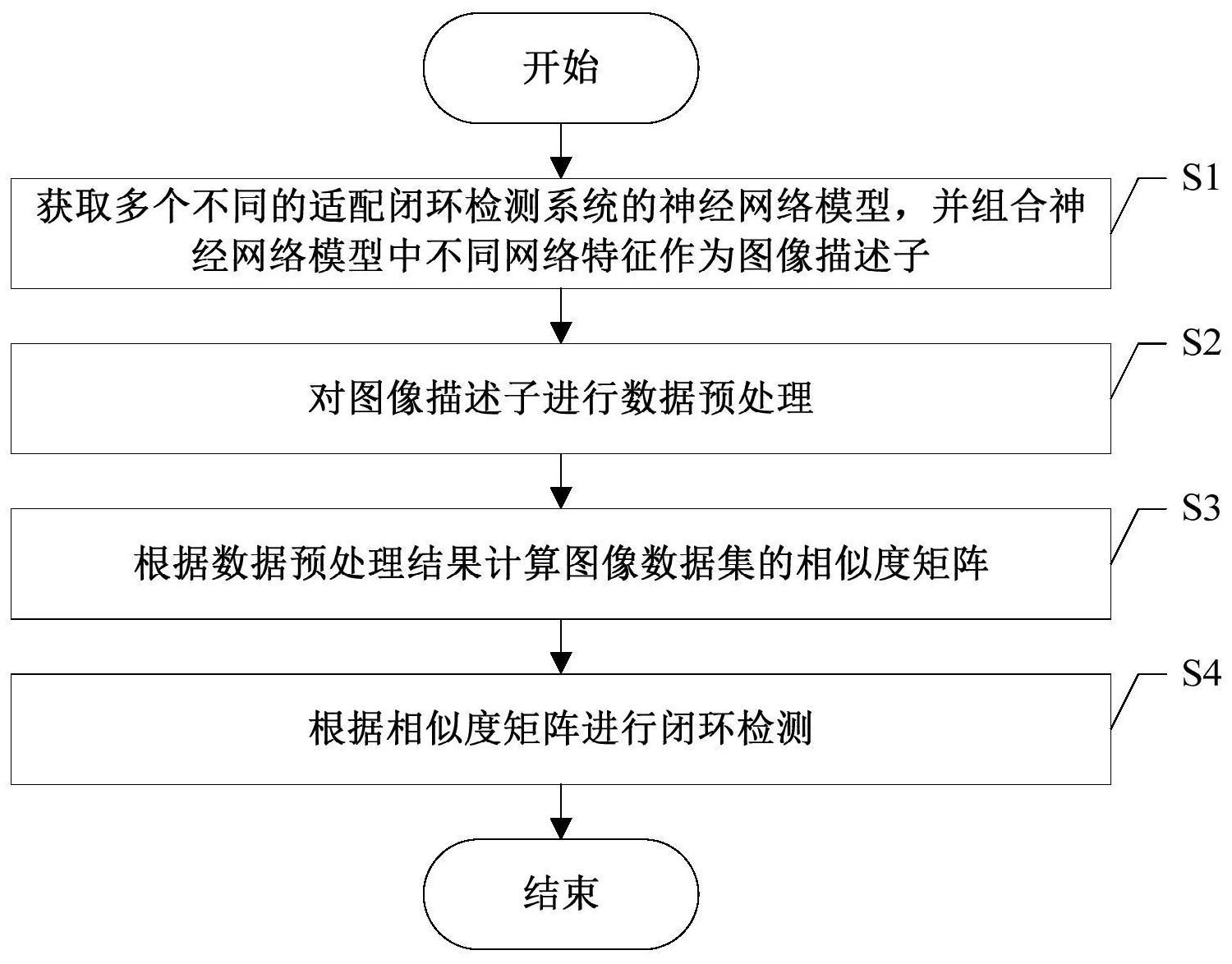
本发明的目的是针对现有的闭环检测方法只使用单个神经网络的单层网络表征 图像,使得图像表示不丰富,进而影响算法性能的问题,提出了一种基于多种网络特征的闭 环检测方法。 本发明的技术方案为:基于多种网络特征的闭环检测方法,包括以下步骤: S1、获取多个不同的适配闭环检测系统的神经网络模型,并组合神经网络模型中 不同网络特征作为图像描述子。 S2、对图像描述子进行数据预处理。 S3、根据数据预处理结果计算图像数据集的相似度矩阵。 S4、根据相似度矩阵进行闭环检测。 进一步地,步骤S1包括以下分步骤: S11、训练不同的神经网络模型,并确定每个神经网络模型的最佳输入、输出、网络 层数和激活函数,或者利用迁移学习的方法对现有的神经网络模型进行部分参数的训练, 得到多个不同的适配闭环检测系统的神经网络模型。 S12、依次找出每个神经网络模型中不同输出层的最佳组合方式,并记录每个神经 网络模型中最佳组合方式的输出层位置。 S13、罗列每个神经网络模型中最佳组合方式的输出层位置,并任意组合不同神经 网络模型下最佳的输出层用于表征图像,作为图像描述子。 进一步地,步骤S2包括以下分步骤: S21、采用降维算法对图像描述子进行降维处理。 S22、对降维后的图像描述子进行组合。 S23、对组合后的图像描述子进行归一化处理。 进一步地,步骤S22中对降维后的图像描述子进行组合的具体方法为:采用直接级 联的方式分配不同神经网络模型在图像描述子中所占的比重,实现图像描述子的组合。 进一步地,步骤S22中对降维后的图像描述子进行组合的具体方法为:调整不同神 经网络模型的网络层所占比重,找到合适的参数,得到组合后的图像描述子。 进一步地,步骤S23中归一化处理的公式为: 其中img_proc表示归一化后的图像描述子,img表示特征级联之后的图像特征矩 阵, 表示img的L2范数,d表示神经网络模型某一层的输出维度。 进一步地,步骤S3中相似度矩阵的计算公式为: 5 CN 111582447 A 说 明 书 3/5 页 其中Sim(i,j)表示第i幅图像li与第j幅图像lj的相似度矩阵, 表示第i 幅图像li归一化后的图像描述子, 表示第j幅图像lj归一化后的图像描述子, 表示第i幅图像li与第j幅图像lj的差异大小,Sim(i ,j)∈[0 , 1]。 进一步地,步骤S4具体为:设定阈值Th,若Sim(i,j)≥Th,则判断为闭环,否则判断 为非闭环,实现闭环检测。 本发明的有益效果是:本发明在环境变化情况下具有更好的鲁棒性能,采用多种 网络特征作为图像特征描述子,一方面是因为不同神经网络模型输出的图像特征着重点不 同,但是能够很好的表征一幅图像,另一方面考虑到同一网络模型只需要考虑其中一层或 者几层就能很好的表征图像在该模型下的特征,因此本发明利用不同神经网络模型的不同 网络输出层特征组合的方式表征图像,使得图像描述子能够携带更丰富更精准的信息,从 而提高整个闭环检测算法的性能。相较于其他使用卷积神经网络进行闭环检测的方法,本 发明组合了多种神经网络模型的不同层次的特征,综合了不同神经网络模型的低层次和高 层次的图像信息,使得图像表示更加丰富,并在特征级联之前进行了特征降维操作,使得方 法的实时性能得到了保证。 附图说明 图1所示为本发明实施例提供的基于多种网络特征的闭环检测方法总体框架图。 图2所示为本发明实施例提供的基于多种网络特征的闭环检测方法流程图。 图3所示为本发明实施例提供的AlexNet网络结构示意图。 图4所示为本发明实施例提供的VGG16网络结构示意图。











