
技术摘要:
本发明的实施例提供了一种任务处理的控制方法、控制装置及车辆,其中应用于整车控制器的控制方法,包括:根据预设循环周期,在每一周期起始时依次调取输入信号采集函数、控制策略函数以及输出信号发送函数;其中,通过调取的输入信号采集函数,采集与整车控制器连接的 全部
背景技术:
整车控制器(VCU,vehicle Controller Unit)是整个汽车的核心控制部件,它采 集加速踏板信号、制动踏板信号及其他部件信号,并做出相应判断后,控制下层的各部件控 制器的动作,驱动汽车正常行驶。 整车控制器的一个基本功能是准确地按设计周期发送报文数据。但由于整车控制 器在调取函数进行处理时,由于用于接收输入信号的函数与发送输出信号的函数位于不同 周期中,使得在实际运行过程中由于接收输入信号的函数与输出信号的函数不对应,且在 每次发送输出信号之前均有一固定时间的信号处理步骤,导致输出信号的函数所在的周期 存在某一周期时长较长而相邻的另一周期时长较短的波动现象。
技术实现要素:
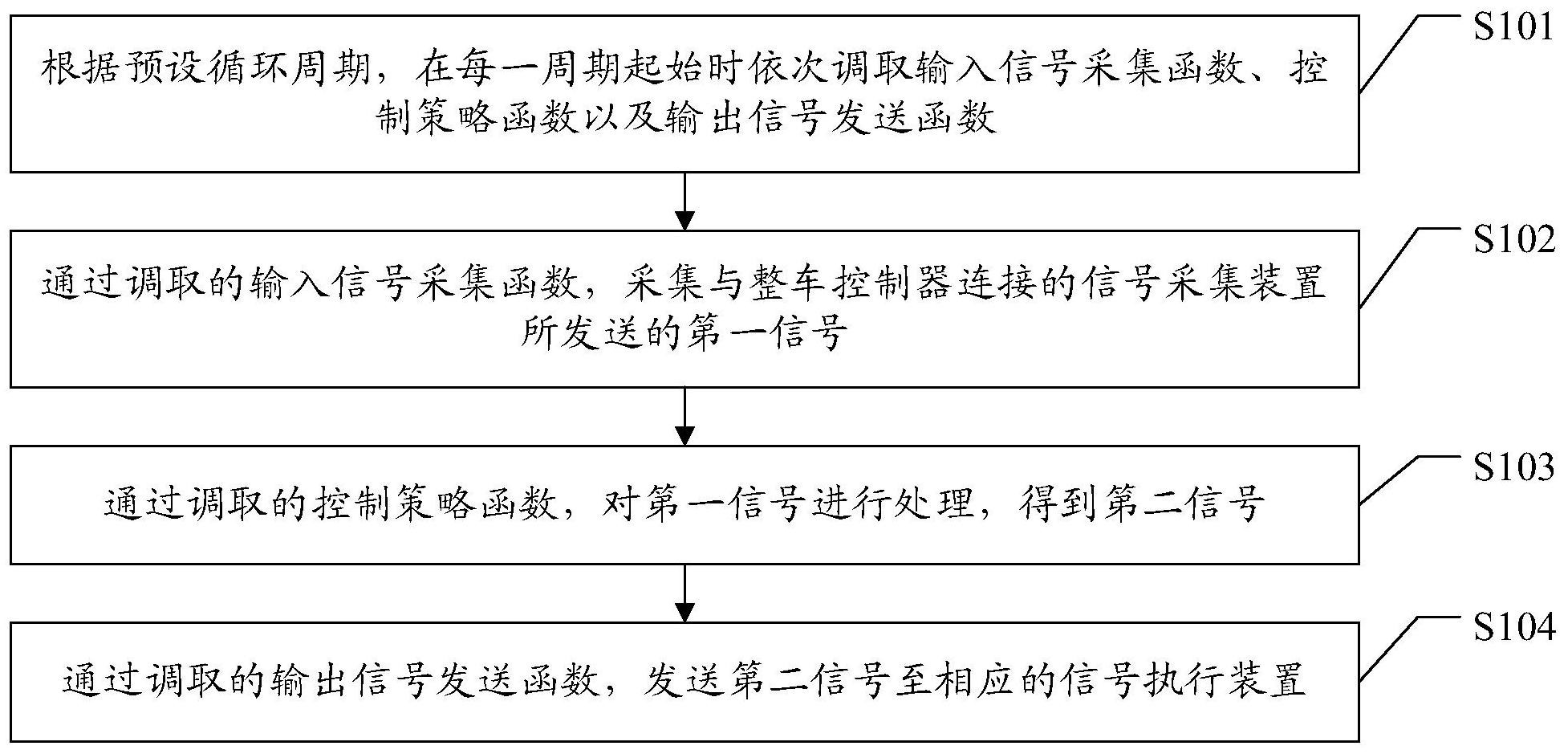
本发明实施例要解决的技术问题是提供一种任务处理的控制方法、控制装置及车 辆,用以解决当前整车控制器在使用过程中输出信号存在周期波动的问题。 为解决上述技术问题,本发明实施例提供了一种任务处理的控制方法,应用于整 车控制器,包括: 根据预设循环周期,在每一周期起始时依次调取输入信号采集函数、控制策略函 数以及输出信号发送函数;其中, 通过调取的输入信号采集函数,采集与整车控制器连接的信号采集装置所发送的 第一信号; 通过调取的控制策略函数,对第一信号进行处理,得到第二信号; 通过调取的输出信号发送函数,发送第二信号至相应的信号执行装置。 具体地,如上所述的任务处理的控制方法,控制方法还包括: 接收预设初始化信号,预设初始化信号包括:整车上电信号; 根据预设初始化信号重置预设循环周期的预设起始时间。 优选地,如上所述的任务处理的控制方法,预设循环周期至少包括:第一循环周期 和第二循环周期; 其中,第一循环周期的第一初始时间为预设循环周期初始化后的预设起始时间, 第一初始时间为第一次进入第一循环周期的时间; 第二循环周期的第二初始时间与第一初始时间间隔一第一预设时长,第二初始时 间为第一次进入第二循环周期的时间。 进一步的,如上所述的任务处理的控制方法,第一循环周期的循环间隔为第二预 设时长,第二循环周期的循环间隔为第三预设时长; 其中,第一预设时长以及至少一第三预设时长的和值,与第二预设时长的任一整 3 CN 111572469 A 说 明 书 2/5 页 数倍均不相等。 本发明的另一优选实施例还提供了一种任务处理的控制装置,包括: 调取模块,用于根据预设循环周期,在每一周期起始时依次调取输入信号采集函 数、控制策略函数以及输出信号发送函数;其中, 采集模块,用于通过调取的输入信号采集函数,采集与整车控制器连接的信号采 集装置所发送的第一信号; 处理模块,用于调取控制策略函数,对第一信号进行处理,得到第二信号; 发送模块,用于调取输出信号发送函数,发送第二信号至相应的信号执行装置。 具体地,如上所述的任务处理的控制装置,还包括: 接收模块,用于接收预设初始化信号,预设初始化信号包括:整车上电信号; 初始化模块,用于根据预设初始化信号重置预设循环周期的预设起始时间。 本发明的又一优选实施例该提供了一种整车控制器,包括:如上所述的任务处理 的控制装置。 本发明的再一优选实施例该提供了一种车辆,包括:如上所述的整车控制器。 与现有技术相比,本发明实施例提供的一种任务处理的控制方法、控制装置及车 辆,至少具有以下有益效果: 在本发明的实施例中,在预设循环周期的每一周期均依次调取信号采集函数、控 制策略函数以及输出信号发送函数,并通过调取的输入信号采集函数采集信号采集装置所 发送的第一信号,通过控制策略函数对采集到的第一信号进行处理得到第二信号,其中第 一信号包括但不限于当前周期采集到的信号采集装置所发送的信号;然后通过输出信号发 送函数将第二信号发送至相应的信号执行装置,其中第二信号包括但不限于当前周期通过 控制策略函数处理后得到的信号,使得每一周期中所执行的操作流程均相同,使得每一周 期中开始调取以及执行输出信号发送函数的时间与对应周期的起始时间之间的时间间隔 相同,避免了出现周期波动现象,保证整车控制器在实际运行过程中与预先设置的周期一 致,保证整车控制器的正常功能的实现。 附图说明 图1为本发明的任务处理的控制方法的流程示意图之一; 图2为本发明的任务处理的控制方法的流程示意图之二; 图3为本发明的任务处理的控制装置的结构示意图。











