
技术摘要:
本发明公开一种可进行多角度定位的机械人底座,包括定位机构、限位推杆、调节机构、支撑机构和导向气缸,所述支撑机构的上端面均匀等距螺纹滑动连接有三组调节机构。本发明若是需要对机械人的操作位置进行调节,此时使用者可通过外部操控机构启动六组导向气缸,导向气 全部
背景技术:
工业机器人是广泛用于工业领域的多关节机械手或多自由度的机器装置,具有一 定的自动性,可依靠自身的动力能源和控制能力实现各种工业加工制造功能,工业机器人 被广泛应用于电子、物流、化工等各个工业领域之中, 但是现有的机械人底座,其对机械人在进行操作时定位支撑的稳定性存在不足, 同时在进行调节时其定位支撑的角度也存在一定的局限性,降低了后续进行搬运或者机械 加工的效率,所以急需一种可进行多角度定位的机械人底座来解决上述存在的问题。
技术实现要素:
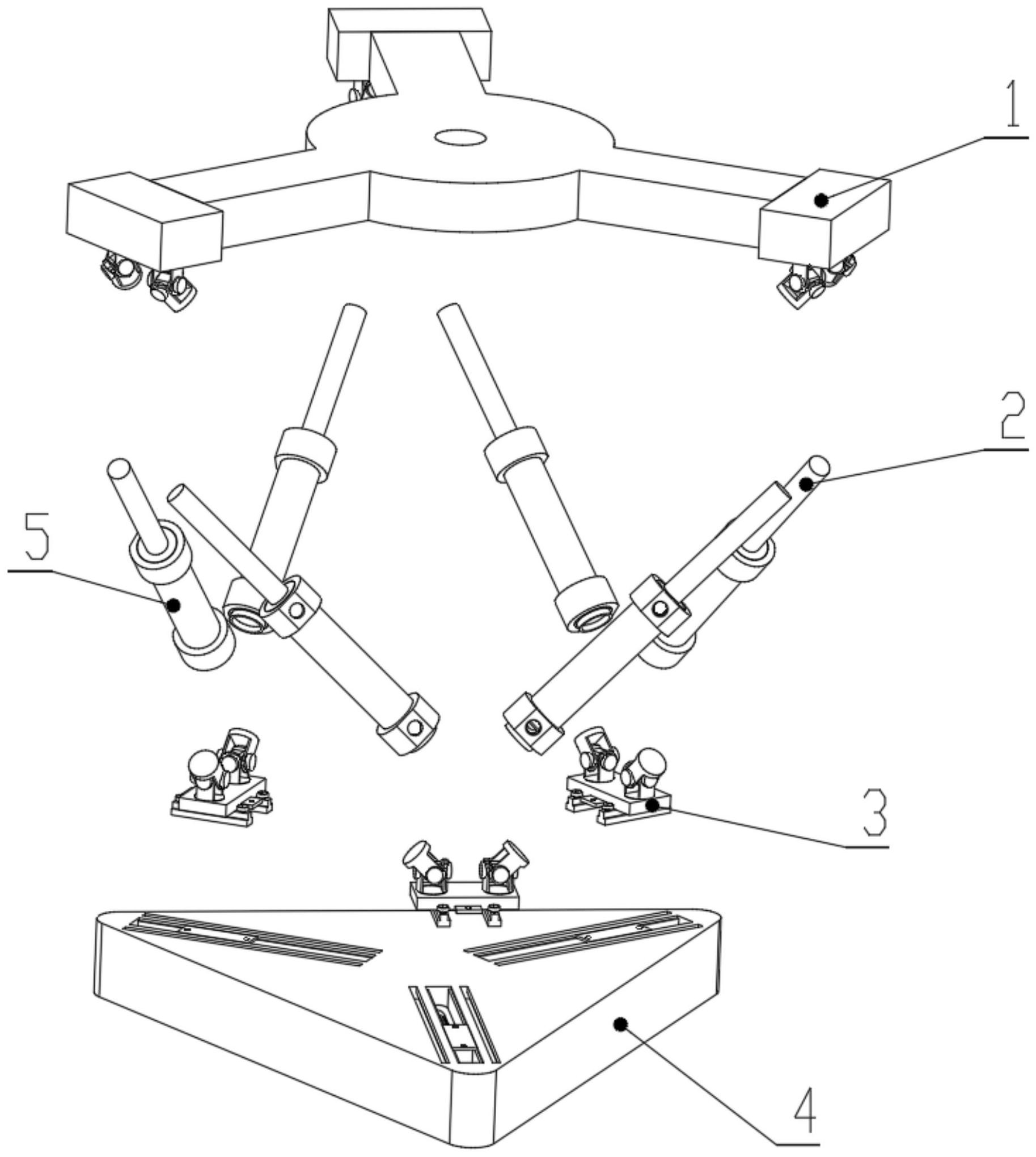
本发明的目的在于提供一种可进行多角度定位的机械人底座,以解决上述背景技 术中提出的问题。 为实现上述目的,本发明提供如下技术方案:一种可进行多角度定位的机械人底 座,包括定位机构、限位推杆、调节机构、支撑机构和导向气缸, 所述支撑机构的上端面均匀等距螺纹滑动连接有三组调节机构,且所述支撑机构 包括螺纹板、齿轮座、连接齿轮、固定丝杆、限位滑槽、底座、固定电机和限位卡槽,所述底座 的内端面均匀等距开设有三组限位卡槽,且位于所述限位卡槽的外端面对称开设有用于限 位的限位滑槽,所述底座的内端面中心处转动卡接有齿轮座,且位于所述齿轮座的内端面 转动啮合连接有三组连接齿轮,所述连接齿轮的前端面中心处固定连接有固定丝杆,所述 固定丝杆的外端面螺纹套接有用于定位的螺纹板,所述底座的底端面中心处固定连接有用 于传动的固定电机, 所述支撑机构的上端面通过调节机构转动连接有用于调节的导向气缸,且位于所 述导向气缸的内端面滑动距离有限位推杆,所述限位推杆的顶端面转动连接有用于定位的 定位机构,在进行使用时,若是需要进行同时调节三组螺纹板的支撑位置,使用者可通过固 定电机带动齿轮座,进而带动三组固定丝杆同时转动,同时也带动螺纹板在限位卡槽内部 同时同向向内部或者外部位移,提高了后续对螺纹板位置进行调节的精准性,同时在进行 调节时,使用者还可通过连接板与螺纹板分离,随后通过定位螺栓进一步定位调节机构的 位置,两种不同的调节方式,能有效满足各种对调节机构在支撑机构上部的定位位置,从而 满足了对机械人各个加工角度进行快速的调节和定位,提高了定位与调节的速度与效率。 优选的,所述调节机构包括第二连接头、固定孔、连接座、连接板、连接滑块、螺纹 插孔和定位螺栓,所述连接座的上端面对称开设有用于连接的固定孔,且位于所述固定孔 的内端面固定连接有第二连接头,所述连接座的外端面对称固定连接有连接板,且位于所 述连接座的底端面对称固定连接有连接滑块,所述连接滑块的上端面对称开设有螺纹插 4 CN 111590548 A 说 明 书 2/5 页 孔,所述螺纹插孔的内端面螺纹转动连接有定位螺栓,在对调节机构的位置进行调节时,连 接板与螺纹板能进行定位与连接,方便后续进行组装与定位,同时第二连接头能方便对各 个角度的调节进行支撑限位,为限位推杆和导向气缸的转向提供足够的限位空间,提高了 调节的稳定性。 优选的,所述第二连接头包括用于限位的十字接头以及转动连接在十字接头外端 面的定位头,在进行调节角度时,两组定位头能围绕十字接头进行横向和纵向的转动,从而 全方位的为限位推杆与导向气缸在进行转动时,提供了足够的限位基础。 优选的,所述限位卡槽与螺纹板相适配,所述螺纹板通过限位卡槽滑动卡接在底 座的上端面,所述螺纹板的底部开设有螺纹孔,且所述螺纹孔与固定丝杆相适配螺纹连接, 螺纹传动的方式能有效提高了螺纹板在限位卡槽内部位移的稳定性和精准性,提高后续进 行调节的稳定性。 优选的,所述连接板与限位滑槽的横截面均呈T形设置,且所述连接座通过连接滑 块滑动卡接在限位滑槽的内部,所述螺纹板的顶部固定连接有定位卡板,且所述定位卡板 与连接板相正对,所述连接板与定位卡板正对处均开设有螺纹槽,螺纹槽能方便后续使用 者通过外部螺纹栓将螺纹板与连接板进行定位和连接,提高了后续进行连接的稳定性,同 时也方便了进行拆卸。 优选的,所述定位螺栓包括用于支撑的螺纹栓、固定连接在螺纹栓顶部的六角板 以及固定连接在螺纹栓底部的压块,所述螺纹插孔包括用于限位的螺纹卡槽以及开设螺纹 卡槽底部的转槽,所述转槽与压块相适配转动卡接,压块能方便使用者后续在对调节机构 进行定位时,提高定位的稳定性。 优选的,所述限位卡槽的内端面顶部中心处开设有槽体,且所述槽体与固定丝杆 进行转动卡接,所述连接齿轮的后端面中心处固定连接有定位杆,且所述定位杆与齿轮座 内端面侧壁进行滑动连接,槽体能对固定丝杆进行转动卡接限位,方便后续对固定丝杆进 行快速的安装,定位杆能转动支撑在齿轮座内部,进而提高了齿轮座内部的连接齿轮进行 转动时的稳定性。 优选的,所述底座的底端面开设有电机槽,且所述电机槽与固定电机进行固定卡 接,所述固定电机与齿轮座的底部进行固定连接,方便后续对固定电机进行快速的定位与 安装。 优选的,所述定位机构包括限位板、支撑板、固定槽和第一连接头,所述支撑板的 外端面均匀等距固定连接有三组限位板,且位于所述限位板的底端面对称开设有固定槽, 所述固定槽的底端面中心处固定连接有第一连接头,支撑板能方便后续使用者对机械人进 行快速的定位与安装,提高了定位的精准性,同时第一连接头能对后续调节支撑板的支撑 稳定性,提供足够的限位空间进行转动。 与现有技术相比,本发明的有益效果如下: 1.本发明若是需要对机械人的操作位置进行调节,此时使用者可通过外部操控机 构启动六组导向气缸,导向气缸能带动内部的限位推杆进行伸长与收缩,同时使用者可同 时控制六组导向气缸与限位推杆进行配合伸缩,能使得支撑板上部的机械人保持水平运 动,也能通过伸缩一组限位推杆和导向气缸使得其余多组限位推杆与导向气缸进行伸长, 从而调节机械人在进行加工的角度,提高了机械人在进行加工时的适应性能。 5 CN 111590548 A 说 明 书 3/5 页 2.本发明在进行使用时,若是需要进行同时调节三组螺纹板的支撑位置,使用者 可通过固定电机带动齿轮座,进而带动三组固定丝杆同时转动,同时也带动螺纹板在限位 卡槽内部同时同向向内部或者外部位移,提高了后续对螺纹板位置进行调节的精准性,同 时在进行调节时,使用者还可通过连接板与螺纹板分离,随后通过定位螺栓进一步定位调 节机构的位置,两种不同的调节方式,能有效满足各种对调节机构在支撑机构上部的定位 位置,从而满足了对机械人各个加工角度进行快速的调节和定位,提高了定位与调节的速 度与效率。 3.本发明使用者可根据操作需求自行调节支撑角度,在进行调节时,使用者可将 外部螺纹栓通过外部工具从连接板与螺纹板上去除,随后向前部或者后部位移连接座,由 于调节机构解除了与支撑机构的连接,故调节机构能通过连接滑块在支撑机构上部滑动, 进而单独调节了一组限位推杆和导向气缸的长度,方便后续适应机械人对不同角度的工件 进行加工,同时在位移完毕后,若是需要进行固定,使用者可通过外部工具转动定位螺栓, 定位螺栓能压合在限位滑槽底部完成对调节机构的限位,方便后续进行调节。 附图说明 图1为本发明的主体爆炸图; 图2为本发明的主体装配图; 图3为本发明的定位机构爆炸图; 图4为本发明的定位机构装配图; 图5为本发明的调节机构爆炸图; 图6为本发明的调节机构装配图; 图7为本发明的支撑机构爆炸图; 图8为本发明的支撑机构装配图。 图中:1-定位机构、2-限位推杆、3-调节机构、4-支撑机构、5-导向气缸、101-限位 板、102-支撑板、103-固定槽、104-第一连接头、301-第二连接头、302-固定孔、303-连接座、 304-连接板、305-连接滑块、306-螺纹插孔、307-定位螺栓、401-螺纹板、402-齿轮座、403- 连接齿轮、404-固定丝杆、405-限位滑槽、406-底座、407-固定电机、408-限位卡槽。











