
技术摘要:
本发明涉及一种自平衡式大作业空间升降装置,包括基座组件、固定组件、平行四杆框架组件、承载框、驱动组件和平衡箱;所述基座组件包括固定基座、活动基座、平衡箱基座、第一铰支座和第二铰支座;所述固定组件对称设置在固定基座前部两侧,所述平行四杆框架组件设置在 全部
背景技术:
升降装置是一种将人或者货物升降到某一高度的升降设备,在工厂、自动仓库等 物流系统中进行垂直输送时,升降平台上往往还装有各种平面输送设备,作为不同高度输 送线的连接装置,一般采用液压驱动,故称液压升降台,除作为不同高度的货物输送外,广 泛应用于高空的安装、维修等作业,按照升降机构的不同分为剪叉式、升缩式、套筒式、升缩 臂式和折臂式等;按移动的方法不同分为固定式、拖拉式、自行式、车载式和可驾驶式等。 但现有的升降机构中要提高升程就要增加底部固定高度范围,如液压缸、电推杆 等,或者增大所占空间,如箭叉机构等,并且只能实现同一垂直面内的升降,若将物体托举 致所在位置前后会使重心发生改变。 目前公开号为CN111017791A的发明专利公开了一种自动化货物升降装置,包括底 座、电机和控制开关,所述底座的上方安装有升降机构,且升降机构的内部安装有滚柱,所 述底座的上方固定安装在调整机构,所述滚柱的上方安装有托举机构。本发明通过设置挡 板在第一弹簧的弹性支撑下,在该装置进行举升操作时,挡板保持向上状态,对放置在放置 平台上的货物进行阻挡,可以有效的对货物进行防护,大大提高了该装置的安全性,同时, 设置挡板通过第一弹簧与插槽弹性连接,且挡柱与压合板处于同意竖直直线上,当该装置 将货物举升到预定位置时,在压合板向下挤压挡柱的作用下,使得挡板收回插槽内部,配合 放置平台的倾斜,使得货物顺利滑落下来,有效的实现自动化下料操作。 公开号为CN110919324A的发明专利公开了一种定位座升降机构,包括沿前后方向 设置的导轨,所述导轨上滑动固定有前滑动块和后滑动块,所述前滑动块与第一支撑板下 端及推动板下端铰接固定,所述后滑动块与第二支撑板下端铰接固定,所述第一支撑板上 端和第二支撑板上端分别与升降板的前后端铰接固定,所述导轨上方设有台面和伸缩机 构,台面具有上下贯穿的让位槽,所述伸缩机构的输出端与推动板上端铰接固定,所述推动 板上端位于推动板下端后侧,所述台面下侧设有竖向设置的导向板,所述导向板位于升降 板前侧。 公开号为CN110902618A的发明专利公开了一种手摇式自锁升降作业台,包括升降 承载台、底架、升降机构,升降承载台两侧均具有升降轨,升降轨设置有升降齿条;底架具有 滑轨;升降机构具有自锁手摇器、两个驱动齿轮。自锁手摇器用于驱动两个驱动齿轮同步转 动,让驱动齿轮可以带动升降齿条进行升降,从而达到调节升降该升降承载台高度的目的。 由于自锁手摇器自带双向自锁功能,即可以利用自锁手摇器对升降承载台升降的时候,可 以让升降承载台停留在任一高度上,即使工作人员放开自锁手摇器的手柄时,升降承载台 也不会突然下降,则可以避免升降承载台快速下降,砸到或夹到使用者的手部的情况发生, 消除了安全隐患,让作业台的使用更加安全。 以上现有技术虽然都具备升降功能,但均只能实现同一垂直面内的升降,否则重 3 CN 111573558 A 说 明 书 2/4 页 心将发生改变。本发明具有机体自平衡的特点,机构重心会随着托举物下降而重心后移,通 过调整平衡箱内配重的重力与托举物重力相等,运动时可实现机体自平衡,并且本发明的 升降机构具有大作业空间的特点,与传统顶升机构相比可大大增加托举物体的升降范围。
技术实现要素:
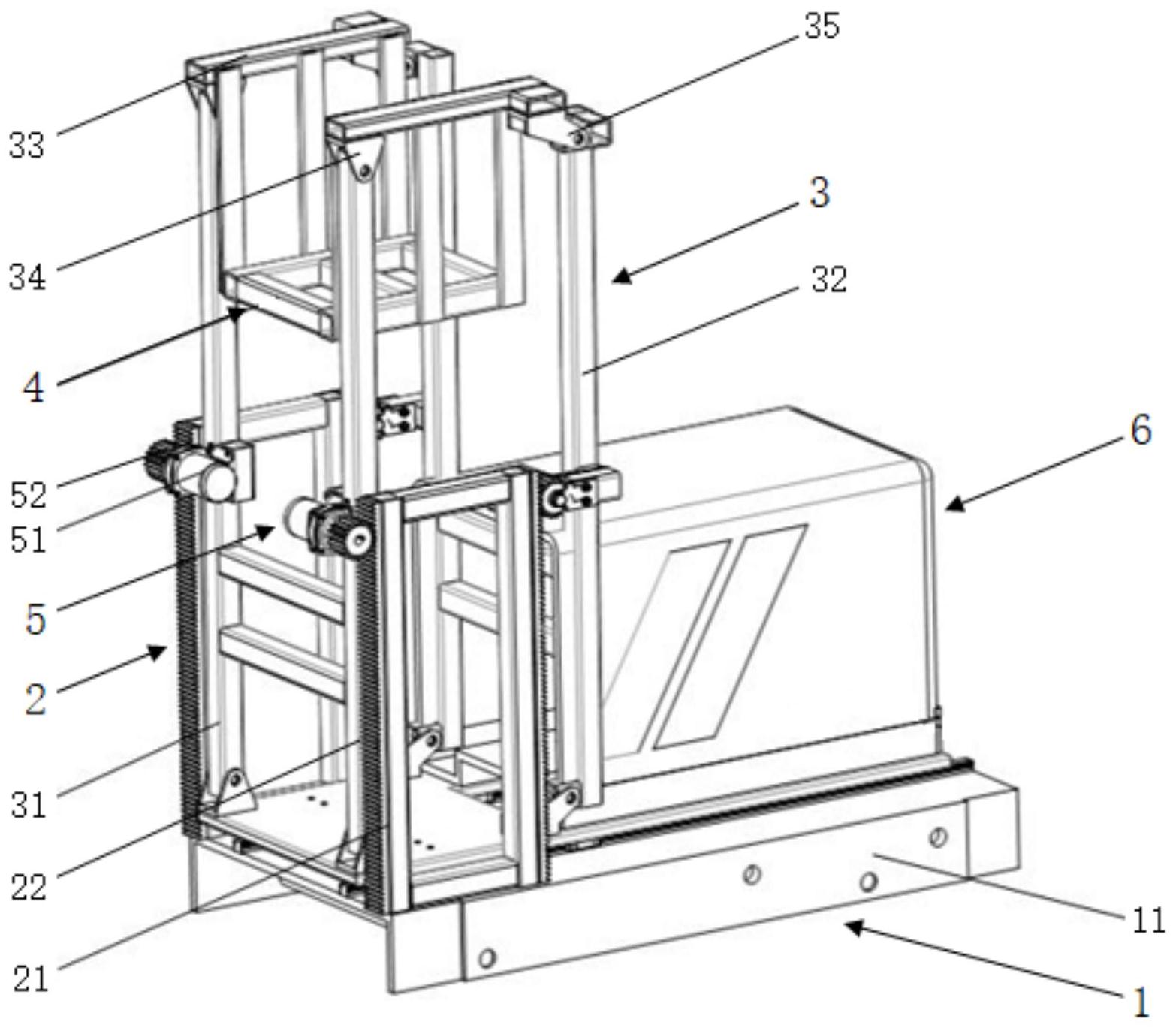
针对上述问题,本发明的目的在于提供一种具有作业空间广、机体自平衡等特点 的一种自平衡式大作业空间升降装置。 本发明采用的技术方案如下: 本发明所提出的一种自平衡式大作业空间升降装置,包括基座组件、固定组件、平 行四杆框架组件、承载框、驱动组件和平衡箱;所述基座组件包括固定基座和滑动连接在固 定基座上表面的活动基座,以及设置在活动基座上表面中后部的平衡箱基座,所述活动基 座上表面前端的左右两侧固定连接有相互对称的第一铰支座,且所述两侧第一铰支座的后 侧间隔一定距离的固定连接有相互对称的第二铰支座;所述固定组件对称设置在固定基座 前部的两侧,所述平行四杆框架组件设置在固定组件的内侧,所述平行四杆框架组件和固 定组件之间通过驱动组件连接,且所述平行四杆框架组件底部的前后两侧分别与第一铰支 座和第二铰支座铰接,所述承载框设置在平行四杆框架组件的顶部内侧,所述平衡箱安装 在平衡箱基座上。 进一步的,所述固定组件包括对称设置在固定基座前部两侧的矩形架和分别设置 在矩形架前后两侧表面的齿条。 进一步的,所述平行四杆框架组件包括底部分别与左右两侧的第一铰支座铰接的 前列活动架,和底部分别与左右两侧的第二铰支座铰接的后列活动架,以及设置在前列活 动架和后列活动架顶部左右两侧之间的连接杆;所述两侧连接杆的前端分别通过第三铰支 座与前列活动架顶部铰接,所述两侧连接杆的后端分别通过第四铰支座与后列活动架顶部 铰接。 进一步的,所述第三铰支座设置在连接杆前端的底部,所述第四铰支座设置在连 接杆后端的外侧,且所述第三铰支座分别与第一铰支座对称设置,所述第四铰支座分别与 第二铰支座对称设置,即所述第二铰支座和第四铰支座相对于第一铰支座和第三铰支座均 外伸一定距离。 进一步的,所述驱动组件包括固定连接在前列活动架和后列活动架左右两侧的电 机,和分别连接在电机输出轴上的齿轮,所述齿轮与所述齿条相啮合。 进一步的,所述电机为直流电机。 进一步的,所述平衡箱基座上断面设置有用于安装平衡箱的凹槽。 进一步的,所述固定基座上表面对称设置有两组导轨,所述滑动基座下表面设置 有分别与所述导轨对应的滑块,所述固定基座和活动基座通过导轨和滑块滑动连接。 本发明与现有技术相比具有以下有益效果: 1.本发明的升降装置具有机体自平衡的特点,机构重心会随着托举物下降而重心 后移,通过调整平衡箱内配重的重力与托举物重力相等,运动时可实现机体自平衡; 2.本发明的升降装置具有大作业空间的特点,与传统顶升机构相比可大大增加托 举物体的升降范围。 4 CN 111573558 A 说 明 书 3/4 页 附图说明 图1是本发明所提出的一种自平衡式大作业空间升降装置一个实施例的整体结构 示意图; 图2是图1基座组件的结构示意图; 图3是图1中固定组件的结构示意图; 图4是图1中平行四杆框架组件的结构示意图; 图5是图1中承载框的结构示意图; 图6是图1中驱动组件的结构示意图; 图7是本发明的工作示意图。











