
技术摘要:
本发明公开了一种基于无人机多光谱数据的水质参数反演方法,属于遥感技术领域。本发明采用IMP‑MPP算法对无人机多光谱图像数据进行聚类处理,进而减少了光谱反射率组合的枚举数量,与MPP算法相比在很大程度上减少了运算量。利用该方法,可以从光谱反射率数据中计算每个 全部
背景技术:
全世界高度重视水环境保护和污染治理工作,各个国家都制定了相关政策和法 规。而水质监测在维护水环境健康方面具有重要作用。传统的水质监测方法主要为现场测 量,该方法有较高的准确性,但存在很大的局限性。且因其较高的时间成本以及劳动成本需 要新的工具来实现目标监测。在过去的几十年里,卫星遥感技术在全球范围的水质评价中 得到广泛应用,现在在沿海水域、河口、湖泊和水库都被证明是有用的。 已有多种卫星遥感数据被应用于水质的监测上。Sentinel-2多光谱成像仪(MSI) 传感器在内陆湖泊水质监测中具有很高的应用潜力,可绘制不同湖泊水质参数。Landsat 8 和HJ-1A图像在反演叶绿素-a浓度、悬浮物浓度和浑浊度也有较好效果。现有技术中,部分 研究从辐射和空间考虑提高高分辨率遥感卫星GF-1对内陆水域悬浮颗粒物监测能力,结果 表明GF-1WFI是非常有前途的,它具有增强的信噪比、对SPM变化有更高的光谱灵敏度和更 高的空间分辨率。总得来说,卫星遥感具有高效、经济成本低以及覆盖范围广等优势。但是 卫星图像无法按需收集,虽然分辨率不断提高,但卫星图像可能仍然过于粗糙,无法对较小 的水体成像,而且高分辨率的商用卫星图像价格昂贵。 近几年来,小型无人机在监测水质方面的应用也很多元化,比如使用无人机对电 导率(EC)、PH、溶解氧(DO)和温度进行现场测量同时采集不同深度的水样。现有技术中,部 分研究利用无人机携带的pH、溶解氧、氨氮等电化学传感器阵列对渔业水质进行评估和预 测,传感器数据可以直接传到服务器后台,最后可将结论显示在应用程序上,这大大提高了 效率,减少了资源的消耗。使用无人机进行现场测量与传统的现场测量相比,确实大大提高 了工作效率,减少了时间和成本,但也只能获取几个点的数据。若想获取全面的水质数据, 需要通过使用无人机携带传感器获取遥感图像数据,即无人机遥感技术。已经证实无人机 遥感系统为水质监测提供了一种有效的途径。 尽管无人机遥感技术在水质监测中的应用已有了一些进展,但由于无人机影像的 分辨率极高,每个像元所代表的实际区域很小,很难精确匹配采样点。因此通常使用样本点 周围i*j像素框内所有光谱反射率的平均值参与拟合回归模型。例如刘彦君等人将无人机 结合多光谱影像应用于小微水域的水质要素反演,使用平均值法进行建模,其中总磷、悬浮 物浓度、浊度的反演模型决定系数分别达到0.7829、0.7503、0.7334。这种方式虽然简洁方 便,但不能最大程度规避数据误差,很难找到最优模型,尤其是样本量较少时。因此,Su-TC 等人提出了一种基于枚举的算法,称为逐像素匹配(MPP)算法,以解决采样点限制和水流动 性的问题。实验结果表明,MPP算法在制作反演模型时模型决定系数R2接近于1。但MPP算法 候选组合数量过多,计算量大,导致接下来回归分析运算速度过慢,且仅能适用于较少的采 样点个数。因此,MPP算法仍需要解决运算量过大的问题。 4 CN 111597756 A 说 明 书 2/8 页
技术实现要素:
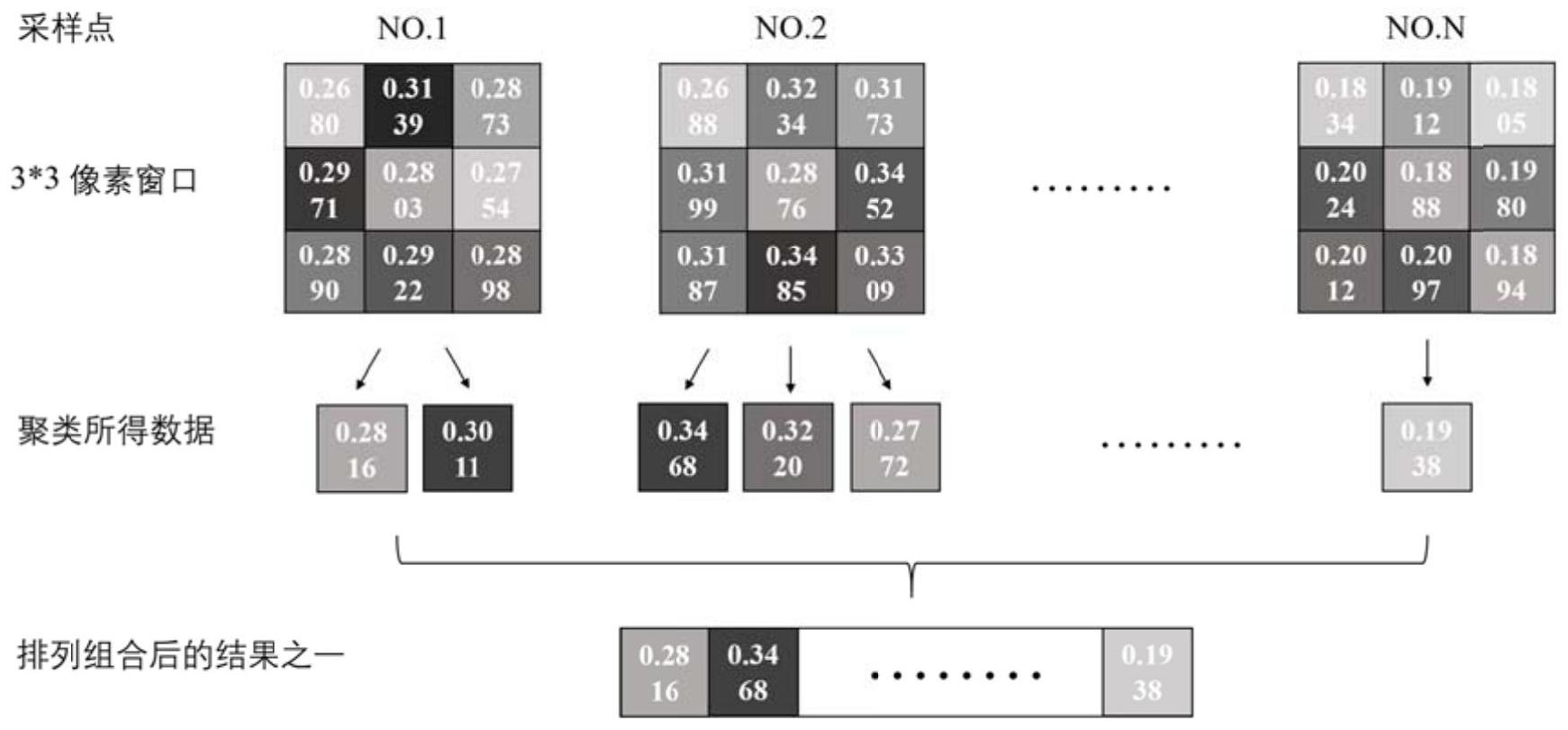
本发明的目的在于解决现有技术中存在的问题,并提供一种基于无人机多光谱数 据的水质参数反演方法。 本发明所采用的具体技术方案如下: 一种基于无人机多光谱数据的水质参数反演方法,该方法步骤如下: S1:在目标区域内设置若干采样点,获取每个采样点的水质参数实测值; S2:通过无人机获取目标区域的多光谱影像,进行辐射校正后得到光谱反射率数 据;所述多光谱影像的获取时间与S1中的采样时间一致; S3:针对每个采样点,在多光谱影像中确定以该采样点为中心的i×j的像素块,采 用聚类方法对i×j个像素的光谱反射率进行聚类,获得若干个聚类中心;其中第n个采样点 的聚类中心个数为kn; 从每个采样点中选择一个聚类中心作为该采样点的候选光谱反射率,所有采样点 的候选光谱反射率构建成一组光谱反射率组合;通过枚举获得共计 组光谱反射率 组合,N为目标区域内的采样点总数; S4:对于每一组光谱反射率组合,分别执行S41~S43: S41:根据所述光谱反射率组合,计算每个采样点对应的待筛选波段组合的像元 值,待筛选波段组合包括若干单一波段和若干多波段组合; S42:基于每个采样点的实测值和像元值,对每种待筛选波段组合与水质参数进行 相关性分析,获得反演水质参数的最佳波段组合; S43:以每个采样点的实测值为因变量,以最佳波段组合的像元值为自变量,进行 回归分析,得到反演模型; S5:从所有光谱反射率组合的反演模型中,确定水质参数的最佳反演模型; S6:在目标时刻,通过无人机获取目标区域的多光谱影像,进行辐射校正后得到光 谱反射率数据;从光谱反射率数据中计算每个像元的最佳波段组合,并根据所述最佳反演 模型计算出每个像元的水质参数反演值,得到目标区域的水质参数空间分布图。 在上述技术方案基础上,各步骤可以进一步采用如下优选方式实现。 作为优选,所述水质参数为悬浮物浓度或浊度。 作为优选,所述无人机上携带的成像设备为MicaSense RedEdge多光谱相机。 作为优选,所述聚类的方法为K-Means聚类,聚类中心为1~3个,所述像素块的大 小为3×3。 作为优选,采样点的水质参数实测值需经过异常值剔除处理。 作为优选,所述待筛选波段组合包括5个单一波段和8个多波段组合,5个单一波段 为R1、R2、R3、R4和R5,8个多波段组合包括R4/R3、R4/R2、R4/R1、R4/(R1 R2 R3)、(R2 R3)/ R4、(R2 R3)*R4、(R3 R4)/R2、R3/R4;其中:波段R1的中心波段为475nm,带宽为20nm;波段R2 的中心波段为560nm,带宽为20nm;波段R3的中心波段为668nm,带宽为10nm;波段R4的中心 波段为840nm,带宽为40nm;波段R5的中心波段为717nm,带宽为10nm。 作为优选,所述水质参数为悬浮物浓度,所述最佳波段组合为R4/R1波段组合。 进一步的,所述反演模型为二次多项式模型,最佳反演模型为y=35.23x2-38.26x 30.12。 5 CN 111597756 A 说 明 书 3/8 页 作为优选,所述水质参数为浊度,所述最佳波段组合为R4/(R1 R2 R3)波段组合。 进一步的,所述反演模型为二次多项式模型,最佳反演模型为y=583 .6x2- 282.81x 50.39。 本发明相对于现有技术而言,具有以下有益效果: 本发明提出的方法,解决了MPP算法运算数据量大运算缓慢且不适用于更多样本 点的缺陷。本发明采用IMP-MPP算法对无人机多光谱图像数据进行聚类处理,可以将训练样 本的数量扩大到30组,与MPP算法相比在很大程度上减少了运算量。IMP-MPP算法计算所得 最佳悬浮物反演模型相较于传统平均值法所得最优模型,决定系数R2从0.6998提升到 0.7014,平均相对误差从16.15%下降到14.79%,表明IMP-MPP算法得出的模型更适用于悬 浮物反演。最佳浊度模型相较于平均法最佳模型,决定系数R2从0.7260提升到0.7350,综合 误差CE从0.1831下降到0.1799,表明IMP-MPP算法得出的模型更适用于浊度反演。 附图说明 图1为图像中的像素块示意图; 图2为IMP-MPP算法示意图; 图3为实测水质参数数据图; 图4为相关性分析曲线图; 图5为悬浮物浓度各项模型曲线拟合图; 图6为浊度各项模型曲线拟合图; 图7为水质参数实测值与预测值对比散点图; 图8为悬浮物浓度反演空间分布图; 图9为浊度反演空间分布图。











