
技术摘要:
本发明提供一种用于FOD探测雷达联调测试的模拟云台系统,相比于实体云台,不能真正进行机械转动,但是能够完全模拟实体云台的工作流程,可与多个探测雷达同时交互通信,从而实现一个模拟云台系统对多个外部FOD探测雷达的搭建调试及环境测试,避免雷达、光电等产品的整 全部
背景技术:
机场道面外来物(FOD)探测设备用于探测机场跑道、滑行道或停机坪等位置出现 的各类异物,如螺钉,石子,塑料,轮胎碎片,乘客遗落的各种物品等,能有效降低机场道面 异物对飞机造成的损伤及财产损失,提升飞行安全性。 探测设备一般由毫米波探测雷达、光学组件、云台等部分组成。工作流程是毫米波 探测雷达首先控制云台对跑道区域进行扫描,云台扫描角度通过毫米波探测雷达的信号处 理机控制。当发现异物后雷达立刻告警并上报异物位置信息,之后毫米波探测雷达的信号 处理机控制云台逐个驻留在发现异物的角度,让光学组件对异物进行光电确认并拍照上 传。在整个过程中,云台一直处于工作状态,并起到连接雷达探测和光学探测流程的重要作 用。 由此可见,在机场道面外来物(FOD)探测设备的研制和生产阶段,雷达、光电等产 品首先要单独调试,最后再组装,每套设备单独调试都需要准备一套实体云台才能保证软 件工作流程能够执行,云台的生产进度会严重影响整个调试周期。发现问题后首先要排除 是否为实体云台的影响,而实体云台易发机械故障,给雷达联调带来难度。此外,实体云台 结构复杂、体积较大,批量测试时环境搭建耗费大量时间和人力,高低温测试时,温箱里面 空间有限,无法进行多套共同测试,降低效率。
技术实现要素:
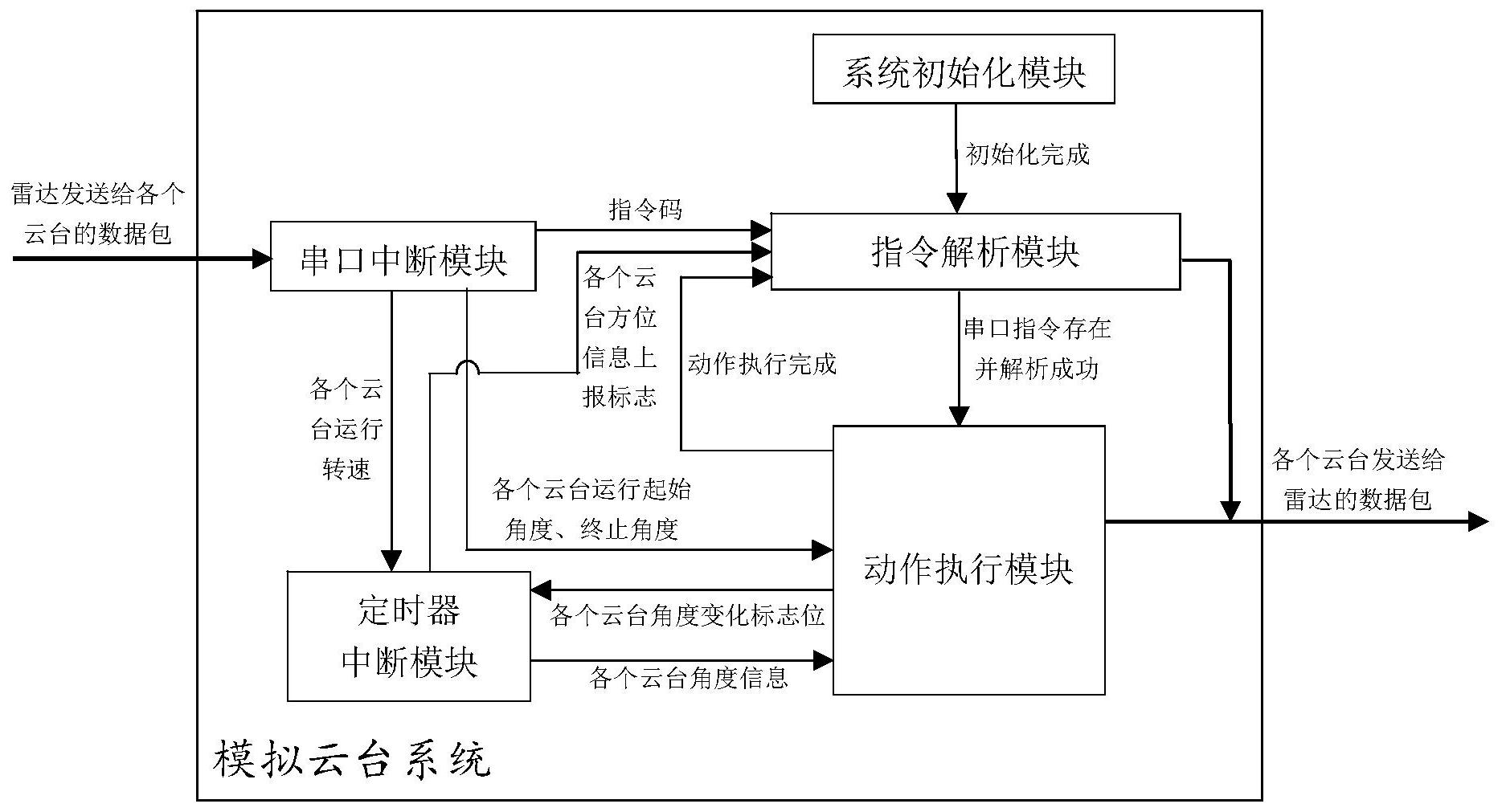
为解决上述问题,本发明提供一种用于FOD探测雷达联调测试的模拟云台系统及 装置,体积小作用大,能够模拟实体云台的工作机制,完成FOD探测雷达联调测试中需云台 配合的工作流程。 一种用于FOD探测雷达联调测试的模拟云台系统,包括串口中断模块、定时器中断 模块、指令解析模块以及动作执行模块,其中,动作执行模块中至少包括两个模拟云台单 元; 所述串口中断模块用于接收雷达发送给各模拟云台单元的数据包,并将数据包中 的信息存储为可供其他模块调用的全局变量,其中,所述数据包中的信息包括指令码、指定 转速、单点驻留终止角度、扇扫起始角度、扇扫终止角度、半圆扫起始角度、半圆扫终止角度 以及方位获取标志位; 所述指令解析模块用于将指令码解析成对应的云台动作信号; 各模拟云台单元用于在各自对应的云台动作信号的控制下,模拟对应的云台动 作,其中,所述云台动作包括扇扫动作、半圆扫动作、单点驻留动作、归零动作、紧急停止动 作、自检动作以及方位获取动作; 5 CN 111580052 A 说 明 书 2/8 页 其中,当模拟云台单元执行扇扫动作与半圆扫动作时,定时器中断模块按设定周 期发出第一角度增量或第一角度减量,所述模拟云台单元根据所述第一角度减量或第一角 度增量调节自身的当前角度,直到当前角度与对应的扇扫起始角度或半圆扫起始角度的差 值在设定范围内;然后,定时器中断模块按设定周期发出第二角度增量或第二角度减量,所 述模拟云台单元根据所述第二角度减量或第二角度增量调节自身的当前角度,直到当前角 度与对应的扇扫终止角度或半圆扫终止角度的差值在设定范围内;最后,模拟云台单元向 雷达发送自身已到达指定位置的信号; 当模拟云台单元执行单点驻留动作时,定时器中断模块按设定周期发出第二角度 增量或第二角度减量,所述模拟云台单元根据所述第二角度减量或第二角度增量调节自身 的当前角度,直到当前角度与单点驻留终止角度的差值在设定范围内;最后,模拟云台单元 向雷达发送自身已到达指定位置的信号; 当模拟云台单元执行归零动作时,定时器中断模块按设定周期发出第一角度减 量,所述模拟云台单元根据所述第一角度减量调节自身的当前角度,直到当前角度与零度 角度的差值在设定范围内;然后,模拟云台单元向雷达发送自身已到达指定位置的信号; 当模拟云台单元执行紧急停止动作时,模拟云台单元执行以下操作: 清除接收到的云台动作信号; 当模拟云台单元执行自检动作时,模拟云台单元执行以下操作: 向雷达发送当前自身状态自检结果数据包; 当模拟云台单元执行方位获取动作时,模拟云台单元执行以下操作: 判断方位获取标志位是否为拉高状态,若为拉高状态,则向雷达上报当前自身角 度。 进一步地,当模拟云台单元执行扇扫动作与半圆扫动作时,第一角度增量与第一 角度减量的获取方法为: 模拟云台单元判断扇扫起始角度与半圆扫起始角度是否小于自身的当前角度,若 小于,则模拟云台单元拉高第一转速角度递减标志位,若不小于,则模拟云台单元拉高第一 转速角度递增标志位; 当第一转速角度递减标志位为高电平时,定时器中断模块每隔设定时间t根据第 一转速与设定时间t的乘积获取模拟云台单元的第一角度减量;当第一转速角度递增标志 位为高电平时,定时器中断模块每隔设定时间t根据第一转速与设定时间t的乘积获取模拟 云台单元的第一角度增量; 当模拟云台单元执行扇扫动作与半圆扫动作时,第二角度增量和第二角度减量的 获取方法为: 当模拟云台单元的当前角度与对应的起始角度的差值在设定范围内时,模拟云台 单元判断扇扫终止角度与半圆扫终止角度是否小于自身的当前角度,若小于,则模拟云台 单元拉高第二转速角度递减标志位,若不小于,则模拟云台单元拉高第二转速角度递增标 志位; 当第二转速角度递减标志位为高电平时,定时器中断模块每隔设定时间t根据所 述指定转速与设定时间t的乘积获取模拟云台单元的第二角度减量;当第二转速角度递增 标志位为高电平时,定时器中断模块每隔设定时间t根据所述指定转速与设定时间t的乘积 6 CN 111580052 A 说 明 书 3/8 页 获取模拟云台单元的第二角度增量。 进一步地,当模拟云台单元执行单点驻留动作时,第二角度增量和第二角度减量 的获取方法为: 模拟云台单元判断单点驻留终止角度是否小于自身的当前角度,若小于,则模拟 云台单元拉高第二转速角度递减标志位,若不小于,则模拟云台单元拉高第二转速角度递 增标志位; 当第二转速角度递减标志位为高电平时,定时器中断模块每隔设定时间t根据所 述指定转速与设定时间t的乘积获取模拟云台单元的第二角度减量;当第二转速角度递增 标志位为高电平时,定时器中断模块每隔设定时间t根据所述指定转速与设定时间t的乘积 获取模拟云台单元的第二角度增量。 进一步地,当模拟云台单元执行归零动作时,第一角度减量的获取方式为: 模拟云台单元判断自身当前角度是否大于零度角度,若大于,则模拟云台单元拉 高第一转速角度递减标志位; 当第一转速角度递减标志位为高电平时,定时器中断模块每隔设定时间t根据第 一转速与设定时间t的乘积获取模拟云台单元的第一角度减量。 进一步地,一种用于FOD探测雷达联调测试的模拟云台系统,还包括初始化模块; 所述初始化模块用于在串口中断模块接收雷达发送给各模拟云台单元的数据包 前,初始化串口中断模块、定时器中断模块、指令解析模块以及动作执行模块。 进一步地,所述定时器中断模块每隔设定时间t拉高时间t定时标志位,若时间t定 时标志位为高,且模拟云台单元当前的角度上报标志位为高,则模拟云台单元获取当前角 度然后经由指令解析模块发送给雷达。 进一步地,所述设定时间t为20ms。 进一步地,一种模拟云台系统的FOD探测雷达联调测试装置,包括结构框架以及安 装在结构框架内部的模拟云台系统、电源系统、通信接口系统; 所述电源系统用于为模拟云台系统供电; 各FOD探测雷达通过通信接口系统与模拟云台系统进行通信,所述模拟云台单元 用于模拟FOD探测雷达与实物云台之间的动作,其中,所述动作包括扇扫动作、半圆扫动作、 单点驻留动作、归零动作、紧急停止动作、自检动作以及方位获取动作。 有益效果: 1、本发明提供一种用于FOD探测雷达联调测试的模拟云台系统,相比于实体云台, 不能真正进行机械转动,但是能够完全模拟实体云台的工作流程,可与多个探测雷达同时 交互通信,从而实现一个模拟云台系统对多个外部FOD探测雷达的搭建调试及环境测试,避 免雷达、光电等产品的整个批生产调试测试受到云台生产进度影响,能够辅助机场道面外 来物(FOD)探测设备进行功能调试或批量自动化测试,提高调试和生产效率;此外,本发明 还可解决多套雷达、光电产品在有限空间的高低温箱内做高低温环境试验,而免受实体云 台体积制约,极大提升了批生产调试测试效率。 2、本发明提供一种模拟云台系统的FOD探测雷达联调测试装置,硬件结构简单稳 定,使用简单的结构即可实现复杂的交互任务;模拟云台系统硬件的稳定,可极大程度地避 免实体云台在FOD雷达批量生产调试过程中由于机械故障而导致的产品测试合格率低、产 7 CN 111580052 A 说 明 书 4/8 页 品交付周期过长的问题;此外,模拟云台系统结构简单,可节约雷达、光电等产品批量测试 时环境搭建耗费的时间和人力。 附图说明 图1为本发明提供的一种用于FOD探测雷达联调测试的模拟云台系统的原理框图; 图2为本发明提供的FOD探测雷达联调测试装置总体外观示意图; 图3为本发明提供的模拟云台系统内部控制板原理框图; 1-模拟云台系统、2-通信接口系统、3-电源系统、4-结构框架。











