
技术摘要:
一种柔性关节扰动观测方法、力矩控制方法、扰动观测器、控制器、柔性关节力矩控制设备和计算机可读存储介质,其中,力矩控制方法包括:根据预设的收敛时间指标,确定有限时间收敛的扰动观测器参数和控制器参数;根据获取到的柔性关节电机输出端和柔性关节负载端的测量 全部
背景技术:
近年来,随着对机器人灵活性、安全性和任务复杂度的提升,人机协作及人机共融 的方式成为了机器人产业的一种新趋势。 人机紧密协作场景对机器人的感知能力、控制能力和安全性保障能力提出了更高 的要求,而具备力感知和力控制功能的柔性关节应用也随之逐步普遍,其也是是机器人智 能化的重要标志。 然而,当前商业化的机器人大都采用位置控制或者速度控制等高刚度控制模式, 各关节的运动轨迹严格按照预定义轨迹执行,其环境适应性差,对负载的感知能力弱,无法 满足人机交互对安全的高需求。即便对于少数采用柔性关节的机器人产品,大多采用传统 的PID(比例-积分-微分)控制器,其力矩控制性能也存在精度差、抗干扰能力差,收敛时间 长的缺陷。
技术实现要素:
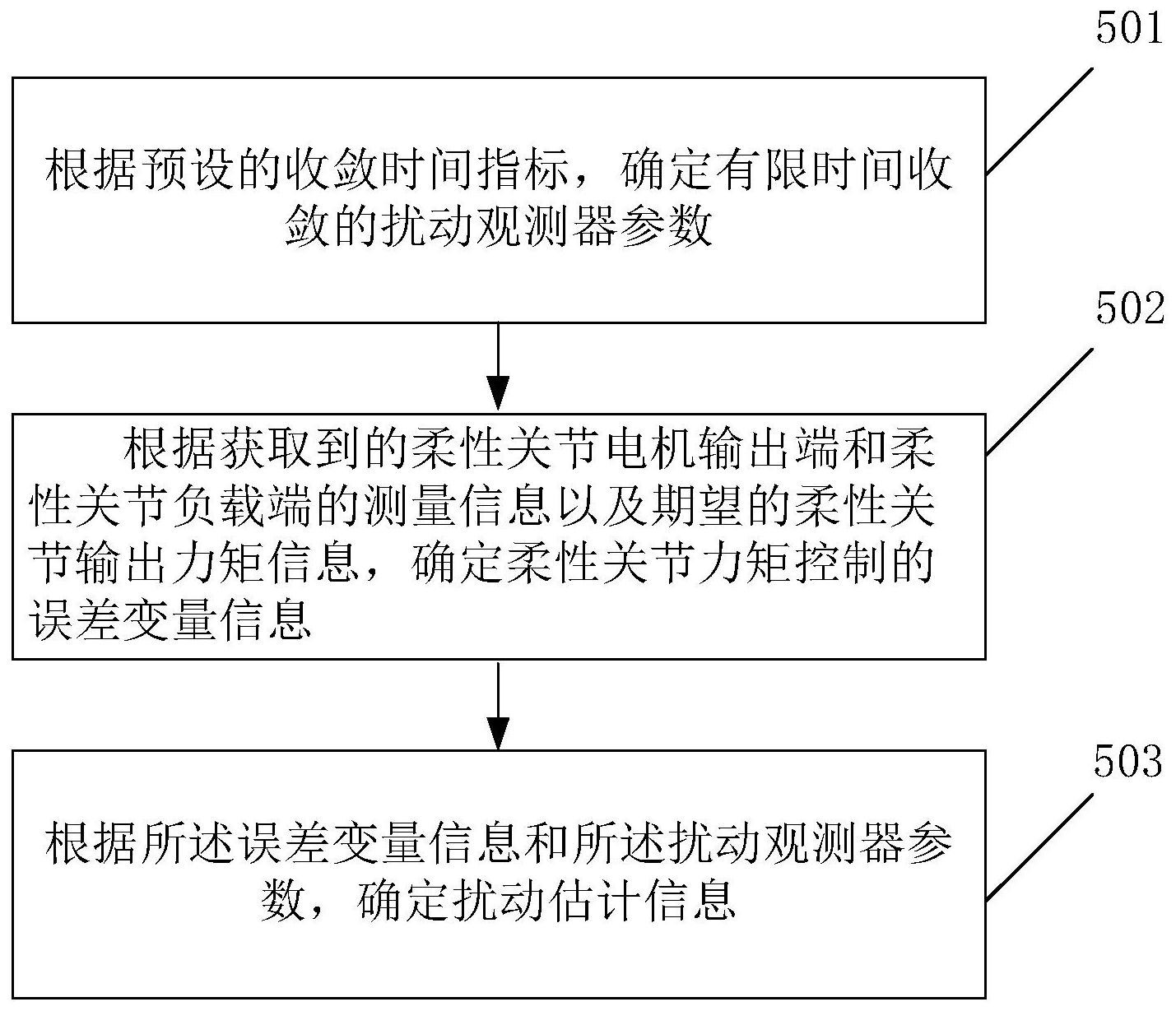
本申请提供了一种柔性关节扰动观测方法、力矩控制方法、扰动观测器、控制器、 柔性关节力矩控制设备和计算机可读存储介质,以实现有限时间柔性关节力矩控制。 本申请实施例提供了一种柔性关节力矩控制方法,包括: 根据预设的收敛时间指标,确定有限时间收敛的扰动观测器参数和控制器参数; 根据获取到的柔性关节电机输出端和柔性关节负载端的测量信息以及期望的柔 性关节输出力矩信息,确定柔性关节力矩控制的误差变量信息; 根据所述误差变量信息和所述扰动观测器参数,确定扰动估计信息; 根据所述扰动估计信息、所述误差变量信息和所述控制器参数,确定线性连续的 柔性关节电机力矩的控制率,按照所述控制率控制所述柔性关节电机力矩。 本申请实施例还提供一种柔性关节扰动观测方法,包括: 根据预设的收敛时间指标,确定有限时间收敛的扰动观测器参数; 根据获取到的柔性关节电机输出端和柔性关节负载端的测量信息以及期望的柔 性关节输出力矩信息,确定柔性关节力矩控制的误差变量信息; 根据所述误差变量信息和所述扰动观测器参数,确定扰动估计信息。 本申请实施例还提供一种柔性关节力矩控制方法,包括: 根据预设的收敛时间指标,确定有限时间收敛的控制器参数; 获取扰动估计信息和误差变量信息,根据所述扰动估计信息、所述误差变量信息 和所述控制器参数,确定线性连续的柔性关节电机力矩的控制率,按照所述控制率控制所 述柔性关节电机力矩。 6 CN 111546346 A 说 明 书 2/21 页 本申请实施例还提供一种扰动观测器,包括:存储器、处理器及存储在存储器上并 可在处理器上运行的计算机程序,所述处理器执行所述程序时实现所述柔性关节扰动观测 方法。 本申请实施例还提供一种控制器,包括:存储器、处理器及存储在存储器上并可在 处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现所述柔性关节 力矩控制方法。 本申请实施例还提供一种柔性关节力矩控制设备,包括:存储器、处理器及存储在 存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现所述柔性关 节力矩控制方法。 本申请实施例还提供一种计算机可读存储介质,存储有计算机可执行指令,所述 计算机可执行指令用于执行所述柔性关节扰动观测方法。 本申请实施例还提供一种计算机可读存储介质,存储有计算机可执行指令,所述 计算机可执行指令用于执行所述柔性关节力矩控制方法。 与相关技术相比,本申请包括:根据预设的收敛时间指标,确定有限时间收敛的扰 动观测器参数和控制器参数;根据获取到的柔性关节电机输出端和柔性关节负载端的测量 信息以及期望的柔性关节输出力矩信息,确定柔性关节力矩控制的误差变量信息;根据所 述误差变量信息和所述扰动观测器参数,确定扰动估计信息;根据所述扰动估计信息、所述 误差变量信息和所述控制器参数,确定线性连续的柔性关节电机力矩的控制率,按照所述 控制率控制所述柔性关节电机力矩。通过本申请实施例,可以实现有限时间观测,在任意扰 动形式下实现误差的有限时间收敛,而且输出的控制量连续,可直接应用于柔性关节的物 理系统中。 本申请的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变 得显而易见,或者通过实施本申请而了解。本申请的其他优点可通过在说明书以及附图中 所描述的方案来实现和获得。 附图说明 附图用来提供对本申请技术方案的理解,并且构成说明书的一部分,与本申请的 实施例一起用于解释本申请的技术方案,并不构成对本申请技术方案的限制。 图1为柔性机器人关节的构成示意图; 图2为柔性机器人关节的动力学特性示意图; 图3为本申请实施例的扰动观测器-力矩控制器相融合的有限时间力矩控制框架 示意图; 图4为本申请实施例的扰动观测器收敛的证明过程示意图; 图5为本申请实施例的柔性关节扰动观测方法的流程图(应用于扰动观测器); 图6为本申请实施例的柔性关节力矩控制方法的流程图(应用于控制器); 图7为本申请实施例的柔性关节力矩控制方法的流程图(应用于柔性关节力矩控 制系统); 图8为本申请应用实例的柔性关节力矩控制方法的流程图; 图9为本申请实施例的仿真实验中输入延迟曲线、期望的力矩曲线和经延迟环节 7 CN 111546346 A 说 明 书 3/21 页 后的力矩曲线。 图10为本申请实施例的扰动d1的估计结果; 图11为本申请实施例的扰动的一阶导数估计结果; 图12为本申请实施例的扰动d2的估计结果; 图13为本申请实施例的所述方法与PID方法的力矩跟踪性能曲线(仿真实验); 图14为本申请实施例的所述方法与PID方法的跟踪误差曲线图(仿真实验); 图15为本申请实施例的所述方法与PID方法的力矩跟踪性能曲线(实物实验); 图16为本申请实施例的所述方法与PID方法的跟踪误差曲线图(实物实验)。











