
技术摘要:
本申请提供一种风机控制方法、装置、设备及存储介质,涉及风力发电技术领域。该方法包括:根据第一风机组的风向及第一风机组的运行参数,确定第一风机组的尾流区域;根据尾流区域,确定第一风机组的偏航角度;根据偏航角度,控制第一风机组进行偏航。本申请的方法通过 全部
背景技术:
风力发电机组是一种把流动空气中的风能转换为电能的装置。风力发电机组吸收 空气中部分能量并施加扰动后,会在风力发电机组的下游形成受风力发电机组影响的尾流 区,风场中的风力发电机组会受到附近其他机组尾流的影响,造成发电量损失,增大疲劳载 荷,影响使用寿命。 现有技术中,一般采取上游风力发电机组偏航以降低尾流对下游机组的影响。主 要是根据上游风机位置与下游风机位置连线确定尾流方向,并根据尾流方向确定偏航角 度。 但是,由于风场环境不同,会出现上下游风向不一致的情况,从而尾流方向判断准 确性较差,导致偏航角度精确性较差的问题。
技术实现要素:
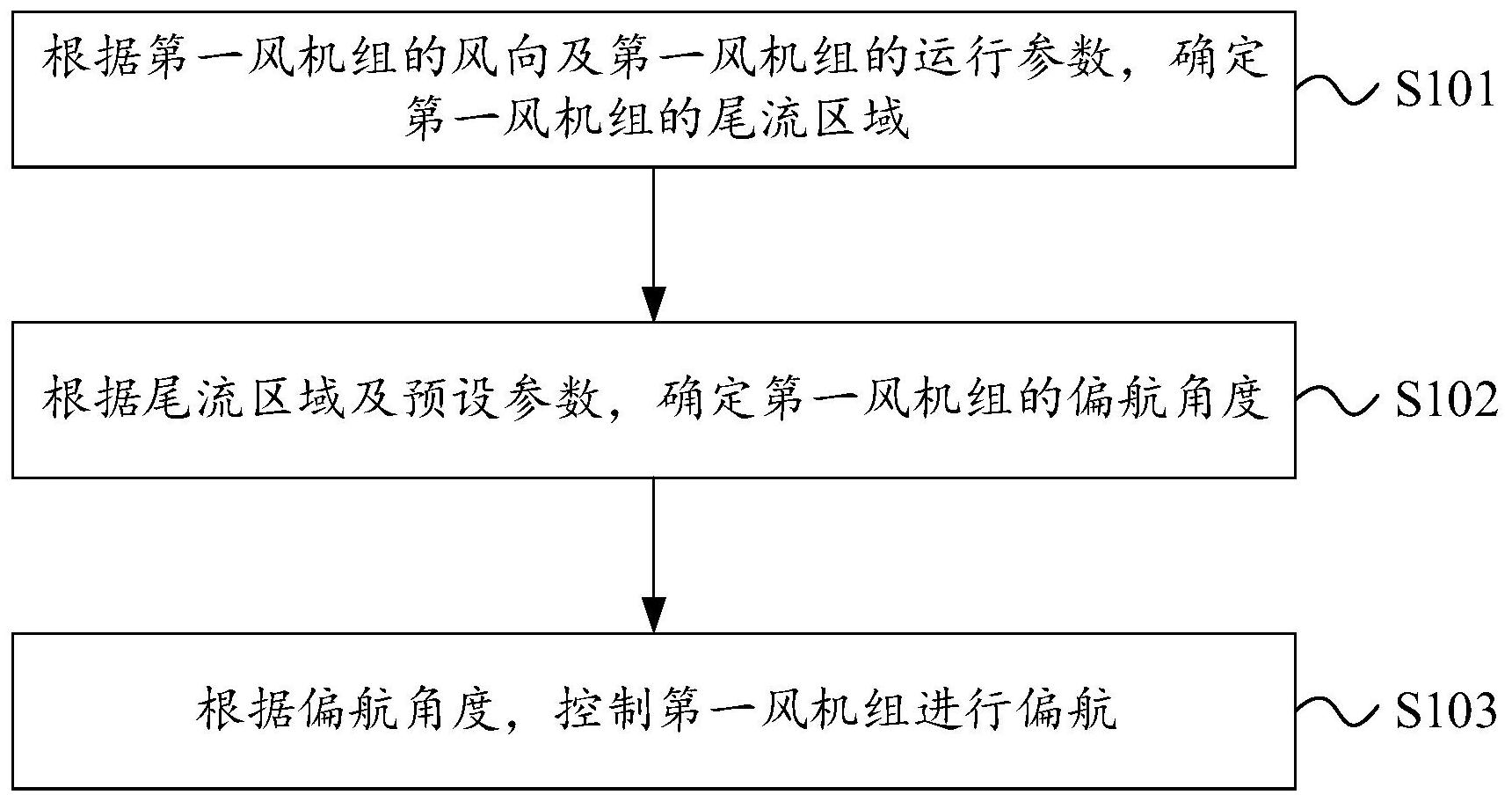
本发明的目的在于,针对上述现有技术中的不足,提供一种风机控制方法、装置、 设备及存储介质,以便于解决现有技术中存在的控制风机偏航精确性较差的问题。 为实现上述目的,本申请实施例采用的技术方案如下: 第一方面,本申请实施例提供了一种风机控制方法,包括: 根据第一风机组的风向及所述第一风机组的运行参数,确定所述第一风机组的尾 流区域; 根据所述尾流区域及预设参数,确定所述第一风机组的偏航角度; 根据所述偏航角度,控制所述第一风机组进行偏航。 可选地,所述根据第一风机组的风向及所述第一风机组的运行参数,确定所述第 一风机组的尾流区域,包括: 根据所述第一风机组的风向及所述第一风机组的运行参数,采用预先训练的尾流 模型,确定所述第一风机组的尾流区域。 可选地,所述尾流区域包括:尾流方向;所述根据所述尾流区域,确定所述第一风 机组的偏航角度之前,所述方法还包括: 根据第二风机组的风向、所述尾流方向、及风机组距离,确定所述第一风机组是否 满足预设的偏航条件;其中,所述第二风机组为所述第一风机组的下游风机组,所述风机组 距离为所述第一风机组与所述第二风机组之间的距离; 所述根据所述尾流区域及预设参数,确定所述第一风机组的偏航角度,包括: 若所述第一风机组满足所述偏航条件,则根据所述尾流区域及预设参数,确定所 述第一风机组的偏航角度。 4 CN 111577544 A 说 明 书 2/8 页 可选地,所述尾流区域包括:尾流长度;所述根据所述第二风机组的风向及风机组 距离,确定所述第一风机组是否满足预设的偏航条件,包括: 若所述第二风机组的风向和所述尾流方向的差值在方向偏差阈值范围内,且,所 述风机组距离小于所述尾流长度,则确定所述第一风机组满足所述预设的偏航条件; 若所述第二风机组的风向和所述尾流方向的差值不在所述方向偏差阈值范围内, 或者,所述风机组距离大于或等于所述尾流长度,则确定所述第一风机组不满足所述预设 的偏航条件。 可选地,所述尾流区域包括:尾流宽度;所述预设参数包括:风机叶轮直径、第二风 机组的风向、所述风机组距离;所述根据所述尾流区域及预设参数,确定所述第一风机组的 偏航角度,包括: 根据所述尾流区域及预设参数,采用预设计算公式,确定所述第一风机组的偏航 角度。 可选地,所述方法还包括: 根据每个风机组的扭揽角度、地理方位、以及风向仪探测的所述每个风机组的探 测风向,获取所述每个风机组的风向。 可选地,所述尾流模型采用下述方法训练得到: 根据多个风机样本数据进行模型训练,得到所述尾流模型,每个所述风机样本数 据包括:风机组的风向、风机组的运行参数以及风机组的尾流区域。 第二方面,本申请实施例还提供了一种风机控制装置,包括:确定模块、控制模块; 所述确定模块,用于根据第一风机组的风向及所述第一风机组的运行参数,确定 所述第一风机组的尾流区域;根据所述尾流区域及预设参数,确定所述第一风机组的偏航 角度; 所述控制模块,用于根据所述偏航角度,控制所述第一风机组进行偏航。 可选地,所述确定模块,具体用于根据所述第一风机组的风向及所述第一风机组 的运行参数,采用预先训练的尾流模型,确定所述第一风机组的尾流区域。 可选地,所述尾流区域包括:尾流方向; 所述确定模块,还用于根据第二风机组的风向、所述尾流方向、及风机组距离,确 定所述第一风机组是否满足预设的偏航条件;其中,所述第二风机组为所述第一风机组的 下游风机组,所述风机组距离为所述第一风机组与所述第二风机组之间的距离; 所述确定模块,具体用于若所述第一风机组满足所述偏航条件,则根据所述尾流 区域及预设参数,确定所述第一风机组的偏航角度。 可选地,所述尾流区域包括:尾流长度; 所述确定模块,还具体用于若所述第二风机组的风向和所述尾流方向的差值在方 向偏差阈值范围内,且,所述风机组距离小于所述尾流长度,则确定所述第一风机组满足所 述预设的偏航条件;若所述第二风机组的风向和所述尾流方向的差值不在所述方向偏差阈 值范围内,或者,所述风机组距离大于或等于所述尾流长度,则确定所述第一风机组不满足 所述预设的偏航条件。 可选地,所述尾流区域包括:尾流宽度;所述预设参数包括:风机叶轮直径、第二风 机组的风向、所述风机组距离; 5 CN 111577544 A 说 明 书 3/8 页 所述确定模块,具体用于根据所述尾流区域及预设参数,采用预设计算公式,确定 所述第一风机组的偏航角度。 可选地,所述装置还包括:获取模块; 所述获取模块,用于根据每个风机组的扭揽角度、地理方位、以及风向仪探测的所 述每个风机组的探测风向,获取所述每个风机组的风向。 可选地,所述装置还包括:训练模块; 所述训练模块,用于根据多个风机样本数据进行模型训练,得到所述尾流模型,每 个所述风机样本数据包括:风机组的风向、风机组的运行参数以及风机组的尾流区域。 第三方面,本申请实施例还提供了一种风机控制设备,包括:处理器、存储介质和 总线,所述存储介质存储有所述处理器可执行的程序指令,当风机控制设备运行时,所述处 理器与所述存储介质之间通过总线通信,所述处理器执行所述程序指令,以执行时执行如 上述第一方面所述的风机控制方法的步骤。 第四方面,本申请实施例还提供了一种计算机可读存储介质,所述存储介质上存 储有计算机程序,所述计算机程序被处理器运行时执行如上述第一方面所述的风机控制方 法的步骤。 本申请的有益效果是: 本申请提供一种风机控制方法、装置、设备及存储介质,该方法包括:根据第一风 机组的风向及第一风机组的运行参数,确定第一风机组的尾流区域;根据尾流区域,确定第 一风机组的偏航角度;根据偏航角度,控制第一风机组进行偏航。本申请的方法通过风机组 的风向和运行参数,实时计算尾流区域,并根据尾流区域,确定偏航角度,提高了尾流区域 计算结果的精确度,实现了对风机组偏航的精确控制。 另外,通过综合地理方位、扭缆角度、以及风向仪共同确定各风机组的风向,可以 有效避免风向偏差,提高获取的风机组风向的精确性。 附图说明 为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附 图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对 范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这 些附图获得其他相关的附图。 图1为本申请实施例提供的一种风机控制方法的流程示意图; 图2为本申请实施例提供的另一种风机控制方法的流程示意图; 图3为本申请实施例提供的又一种风机控制方法的流程示意图; 图4为本申请实施例提供的一种风机控制装置的示意图; 图5为本申请实施例提供的另一种风机控制装置的示意图; 图6为本申请实施例提供的又一种风机控制装置的示意图; 图7为本申请实施例提供的一种风机控制设备的示意图。











