
技术摘要:
本发明公开了一种基于全方位轮的模块化智能物流系统物料配送路径规划方法,包括以下几个步骤:S1、采集系统状态,一旦采集到以下两类事件,立即转步骤2,启动系统物料输送路径规划流程;S2、物料输送数据的预处理,确定所有物料配送的起始点、终点及物料配送流量,确定 全部
背景技术:
当今产品市场竞争激烈,物流作为企业“第三个利润源泉”已成为市场竞争的新焦 点。生产物流作为企业物流的重要组成部分,直接影响产品的生产成本和交货期,已成为企 业提高竞争力的关键因素,愈加受到关注。然而,现有物料输送及分拣系统多基于带式或链 式输送技术。其发展面临以下问题: (1)柔性不足,每条物料输送线的输送方向单一,无法根据物料类型设置不同输送 方向;(2)必须与机械手等配合才能实现分拣、合流和编队等功能; (3)鲁棒性差,单个输送节点故障会导致整个物流输送系统瘫痪;这些问题与现代 物流高效、柔性的发展趋势间的矛盾日趋尖锐。 (4)物料配送路径算法直接影响系统的效率及智能化水平。经典路径规划算法(如 Dijkstra算法,Floyd算法,A*算法等)虽然能够实现路径规划的功能,但算法优化目标单 一,一般以最小化路程或最小化路程时间为目标。若将该类方法直接用于该物流系统,不仅 极易出现各智能物流模块物料输送负荷的不均衡,增加物料局部堵塞的风险,也未考虑因 物料输送路径相向冲突而引发的系统死锁,降低了物流系统的整体效率和智能化水平。
技术实现要素:
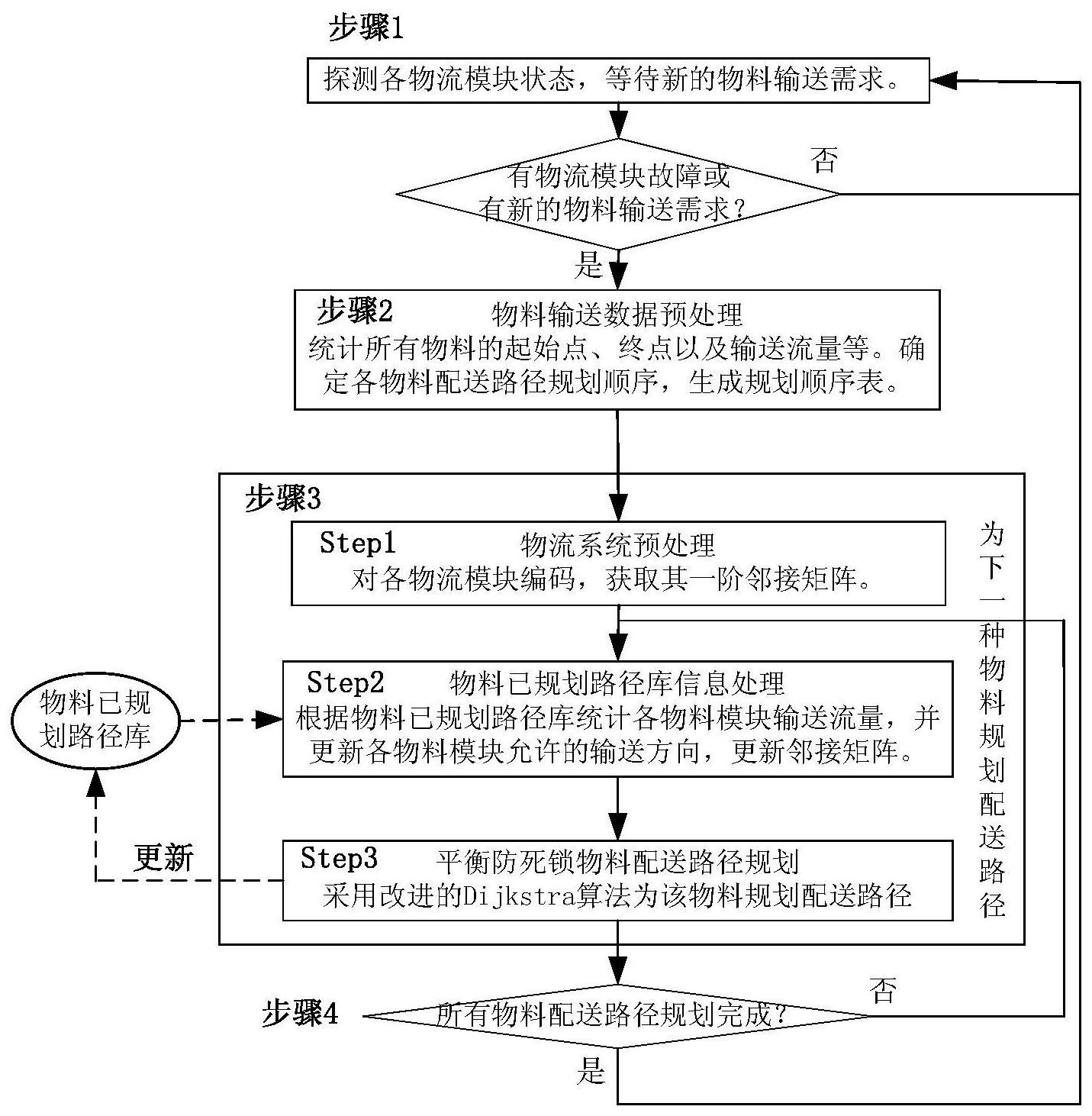
针对上述技术问题,本发明提出了一种基于全方位轮的模块化智能物流系统。该 物流系统不仅能够实现物料的输送、分拣、合流、编队等功能,而且较好的自重构性,当单个 智能物流模块出现故障时,物流系统能够通过配送路径的重新规划保证物料配送的通畅, 提高输送路线的柔性和鲁棒性,从而实现物流系统的智能化。 同时,本发明针对物流系统实现物料输送、分拣和合流的功能需求,公开一种基于 全方位轮的模块化智能物流系统物料配送路径规划方法。该方法采用两类事件启动系统物 料输送路径规划流程,不仅能够及时根据新加入的物料调整系统所有物料配送路径,保证 系统效率;而且在部分智能物流模块出现故障时,能够及时优化系统所有物料配送路径,避 免部分智能物流模块故障造成系统瘫痪,保证系统的鲁棒性。其次,本方法在为每种物料规 划路径前,根据已规划路径库对智能物流模块一阶邻接矩阵进行调整,避免新规划路径物 料与已规划路径物料出现相向冲突,能够避免系统死锁。另外,本方法采用改进的Dijkstra 算法为新物料规划路径,综合考虑各物料智能物流模块输送流量和物料输送时间,能够均 衡各智能物流模块运输负荷,避免系统出现局部拥堵,从而提高物流系统的整体效率和智 能化水平。 为了实现上述技术目的,本发明采用如下技术方案: 基于全方位轮的模块化智能物流系统物料配送路径规划方法,所述模块化智能物 6 CN 111573126 A 说 明 书 2/17 页 流系统由多个智能物流模块组合形成的输送平面,通过多个智能物流模块的接力实现对物 料的输送、分拣以及合流,包括以下几个步骤: S1、采集系统状态,一旦采集到以下两类事件,立即转步骤2,启动系统物料输送路 径规划流程: 事件1.有新的物料输送需求:新的物料输送需求流量较高,为了保证物料系统整 体效率,需对物料输送路径重新规划; 事件2.有部分智能物流模块出现故障:部分智能物流模块发生故障,会导致某些 物料已配送路径失效,为了保证系统的鲁棒性,需对物料输送路径重新规划; S2、物料输送数据的预处理: 确定所有物料配送的起始点、终点及物料配送流量,确定各物料配送路径规划的 顺序,确定顺序后,生成物料配送路径规划顺序表,依此为各物料规划配送路径,完成后转 步骤S3; S3、按照规划顺序表继续为下一种物料规划配送路径,每为一种物料规划出配送 路径后,转步骤S4; 规划配送路径步骤具体如下: S3.1、物流系统预处理: 对各智能物流模块编码,获取其一阶邻接矩阵; S3.2、物料已规划路径库信息处理; 根据物料已规划路径库统计各物料智能物流模块输送流量,并更新各物料智能物 流模块允许的输送方向,更新邻接矩阵; S3.3、平衡防死锁物料配送路径规划; 采用改进的Dijkstra算法为该物料规划配送路径; S4、检查物料配送路径规划顺序表是否为空,若非空,则转步骤S3,继续为下一种 物料规划配送路径,若为空,则转步骤S1。 步骤S2中,确定各物料配送路径规划的顺序方法包括: 根据各物料配送流量的大小顺序,或根据按照物料价值高低、重要程度。 步骤S3.1具体是: 按照一定的顺序对各智能物流模块编码,根据各智能物流模块能够实现的物料输 送方向和各智能物流模块是否处于故障确定智能物流模块邻接关系,智能物流模块间的邻 接关系通过一阶邻接矩阵 和方位矩阵D=[dij]K×K来描述,其中,i和j均表示智 能物流模块的编号,K为系统中智能物流模块的数量, 表示从智能物流模块i到智能物流 模块j的运输时间。dij表示从智能物流模块i与智能物流模块j的方位角; 假定各智能物流模块能将物料向8个方向传送,则 的取值为: 式中,T为相邻智能物流模块的平均物料输送时间; 7 CN 111573126 A 说 明 书 3/17 页 dij的取值为: 步骤S3.2具体是: 根据物料已规划路径库统计各物料智能物流模块输送流量,构成物料智能物流模 块已有流量矩阵,F=[f(i)]1×K,其中,f(i)为第i个智能物流模块已有的物料配送流量,K为 系统中的智能物流模块总数; 物料已规划路径库中存储的是已完成规划的物料路径,假定所有已规划路径的物 料数为NP;第k种物料的配送路径定义为:物料从起始点至终点依此经过的智能物流模块编 号,可表示为 其中, 为第k种物料配送路径中第m个智能物流模块的编号, Nk为第k种物料配送路径途径的智能物流模块总数,按照以下步骤统计各智能物 流模块已有物料输送负荷,确定物料智能物流模块流量矩阵F=[f(i)]1×K,为后续应用 Dijkstra算法规划物料输送路径提供流量信息; 根据物料已规划路径库更新各物料智能物流模块允许的输送方向,更新一阶邻接 矩阵,避免后续规划的物料配送路径与已规划物料路径出现相向冲突。 步骤S3.3中所述改进的Dijkstra算法具体步骤如下: S3.3.1、初始化,输入所需规划物料路径的起始智能物流模块和目标智能物流模 块,假定起始智能物流模块为s,目标智能物流模块为d,设置智能物流模块集合VS={s}和 智能物流模块集合VD={i|i∈V且i≠s}和最优路径矩阵P=[psi]1×K,和代价矩阵H= [hi]1×K,其中,VS为已搜索到与起始智能物流模块s最优路径的智能物流模块集合,VD为尚未 搜索到与起始智能物流模块s最优路径的智能物流模块集合,V为系统中所有智能物流模块 的集合,P为所有智能物流模块与起始智能物流模块s间最优路径矩阵,psi为起始智能物流 模块s至智能物流模块i的最优路径,尚未搜索到最优路径时为 初始化时只有pss={s}, 其余均为 H为所有智能物流模块的代价矩阵,hi为智能物流模块i的代价,计算方法如 下: S3.3.2、搜索VD中拥有最小代价的智能物流模块,不妨设其为智能物流模块k,最 8 CN 111573126 A 说 明 书 4/17 页 小代价为 将智能物流模块k从VD移入VS中,即VS=VS∪{k},VD=VD/ {k},并设置psk={s,k}, 保证路径均为单向路径,,转S3.3.3; S3.3.3、更新VD中每个智能物流模块的代价、最优路径和一阶邻接矩阵,更新方法 如下,对VD中的任意智能物流模块为n,其新的代价hn为: 最优路径psn亦根据tn同步更新,更新方法如下: 转S3.3.4; S3.3.4、判断新加入VS中的智能物流模块k是否为目标智能物流模块,若k=d,则 已搜索到最优路径,转S3.3.5,否则,转S3.3.2; S3.3.5、输出最优路径psd,更新至物料已规划路径库中,并将该种物料从物料配送 路径规划顺序表中删除。 每个智能物流模块均包括: 固定框架,所述固定框架上开有多个孔,每个孔中设有一个全方位减速驱动轮,并 且所述全方位减速驱动轮的部分轮体伸出所述固定框架的上表面设置,通过多个全方位减 速驱动轮上轮体的摩擦力共同作用于物料,通过对多个驱动轮旋转速度及方向的协同控制 对物料实现以下目的: 第一、驱动物料自转以调整姿态; 第二、独立将物料按需要向多个方向定向输送; 第三、通过物料配送路径的规划,实现多个智能物流模块的接力传送; 物联网数据采集装置,设置在所述智能物流模块上,用于判断智能物流模块上方 是否有物料及物料种类; 当智能物流模块上方无物料时,各智能物流模块进入低功耗模式; 当智能物流模块上方有物料时,根据物料种类向各自所需方向传送物料。 所述固定框架包括: 底板; 面板,通过支撑杆与所述底板支撑连接,面板上开有多个孔,多个全方位减速驱动 轮的一部分均通过所述孔穿过所述面板,从而与物料接触。 所述物联数据采集装置是RFID读卡器、接近开关、二维码/条形码读卡器以及摄像 头中的一种或多种。 单个智能物流模块上的所述全方位减速驱动轮的数量为4个,4个所述全方位减速 驱动轮绕所述面板的中心对称设置。 所述全方位减速驱动轮包括: 电机,安装板,全方位减速驱动轮; 电机与全方位减速驱动轮输入端连接,电机带动全方位减速驱动轮旋转; 9 CN 111573126 A 说 明 书 5/17 页 安装板采用但不限于L型安装板,L型安装板一端与所述底板固定连接,另一端与 全方位减速驱动轮第一壳体固定连接。 有益效果: (1)本发明两类事件启动系统物料输送路径规划流程,不仅能够及时根据新加入 的物料调整系统所有物料配送路径,保证系统效率;而且在部分智能物流模块出现故障时, 能够及时优化系统所有物料配送路径,避免部分智能物流模块故障造成系统瘫痪,保证系 统的鲁棒性。 (2)本发明在为每种物料规划路径前,根据已规划路径库对智能物流模块一阶邻 接矩阵进行调整,避免新规划路径物料与已规划路径物料出现相向冲突,能够避免系统死 锁。 (3)本发明采用改进的Dijkstra算法为新物料规划路径,综合考虑各物料智能物 流模块输送流量和物料输送时间,能够均衡各智能物流模块运输负荷,避免系统出现局部 拥堵,从而能够提高系统效率。 附图说明 图1为基于全方位轮的模块化智能物流系统示意图; 其中,1、所需输送的物料示意图;2、基于全方位轮的智能物流模块; 图2为本发明全方位轮在面板上的三种布置方式; 其中,a为中心布置;b为偏心布置;c为对角布置; 图3为基于全方位轮的智能物流模块典型结构示意图; 其中,2-1、制造物联网数据采集装置;2-2、全方位减速驱动轮;2-3、面板;2-4、底 板;2-5、支撑杆; 图4为全方位减速驱动轮结构示意图; 其中,2-2-1、驱动电机;2-2-2、全方位轮;2-2-3、安装板;2-2-4、传动装置; 图5为本发明智能物流模块控制流程; 图6为本发明一个实施例8个传送方向及物料自转结构示意图; 图7为本发明各个物料传送方向对应的四个全方位减速驱动轮的启停及旋转方向 示意图; 图8为本发明四个驱动轮旋转方向、速度与物料传送速度、方向示意图; 图9为本发明四个驱动轮旋转方向、速度与物料自转速度、方向示意图; 图10为本发明模块化智能物流系统控制流程图; 图11为本发明智能物流模块邻接关系建模及物料输送路径示意图; 图12为本发明工业现场环境示意图; 图13为本发明规划设计步骤图; 图14为非布置区膨化后的环境示意图; 图15为X向及Y向扫描扫描后的环境示意图; 图16为完成智能物流模块排列后的环境示意图; 图17为智能物流模块邻接关系建模示意图; 图18为本发明物料输送路径规划步骤; 10 CN 111573126 A 说 明 书 6/17 页 图19为两种物料配送路径相向冲突示意图。











